|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Преобразователи электрических величин в неэлектрические. Принцип работы, устройство и характеристики магнитоэлектрического ИП.Стр 1 из 12Следующая ⇒
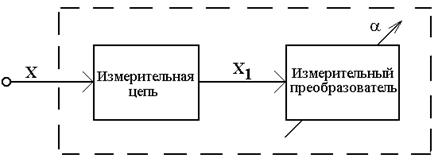
Преобразователи электрических величин в неэлектрические. Принцип работы, устройство и характеристики магнитоэлектрического ИП. Преобразователи электрических величин в неэлектрические – это техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи.
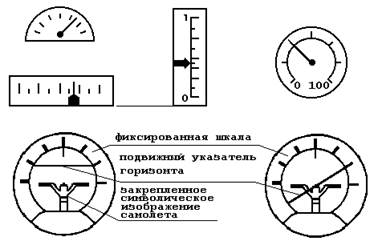
а - приборы с фиксированной шкалой и вращательным или поступательным движением указателя; б - сложное аналоговое устройство отображения (искусственный горизонт) Рисунок - Традиционные аналоговые устройства индикации Аналоговое устройство индикации не только показывает значение отклонения, но и обеспечивает наглядное отображение тенденции изменения отклонения во времени. Цифровое же устройство индикации, напротив, не годится для отображения тенденции изменения измеряемой величины. Таким образом, аналоговое устройство является не только индикатором значения величины, но также и устройством, воспроизводящим направление изменения. При этом абсолютная (DП) погрешность, выражаемая в единицах преобразуемой величины и определяемая как DП = ХП – Q, и относительная (dП) погрешность, определяемая кА отношение абсолютной погрешности к истинному значению преобразованной величины: ,,,,,,,,,,,,,,,,, Приведенная погрешность определяется как отношение Dп к некоторому нормирующему значению ХN и выражается в процентах ,,,,,,,,,,,,,,,,,,,,,,,,,,,,
где DП – абсолютная погрешность преобразователя; ХN – предел преобразования.
Относительная погрешность показаний прибора для трех различных вариантов определения погрешности, указываемой в технических характеристиках для аналогового устройства индикации с линейной шкалой
Структурная схемам электромеханического измерительного преобразователя Все электромеханические преобразователи в зависимости от принципа действия, т.е. от способа преобразования электромагнитной энергии измерительного сигнала в механическую энергию перемещения подвижной части преобразователя, можно дифференцировать на следующие основные группы: - магнитоэлектрические преобразователи; - электродинамические преобразователи;- электромагнитные преобразователи; - электростатические преобразователи;- индукционные преобразователи. Принцип действия магнитоэлектрических преобразователей основан на взаимодействии магнитных полей постоянного магнита и проводника с током, конструктивно выполненного в виде катушки (рамки). Практически все магнитоэлектрические преобразователи можно разделить на две основные разновидности: - преобразователи с подвижной катушкой и неподвижным магнитом; - преобразователи с неподвижной катушкой и подвижным магнитом. Конструктивно преобразователи обеих разновидностей могут быть выполнены: - с внешним (по отношению к рамке) магнитом; - с внутрирамочным (внутренним) магнитом.
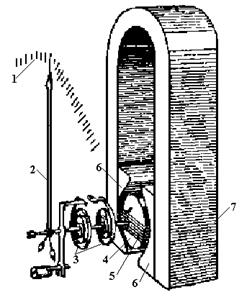
Катушка 5 с числом витков w и площадью витка s находится в магнитном зазоре с равномерным радиальным магнитным полем. Поле в зазоре создается с помощью магнитной системы, состоящей из постоянного магнита 7, полюсных наконечников с цилиндрической расточкой 6 и цилиндрического сердечника 4 из магнитомягкого материала. Благодаря введению в магнитную систему сердечника 4, поле в зазоре, где движется рамка, получается однородным. Подвижная часть крепятся на полуосях и керновых опорах. Катушка 5 наматывается на легком алюминиевом каркасе и жестко крепится на полуосях. При движении катушки в магнитном зазоре в каркасе возникают вихревые токи, создающие момент успокоения . На оси подвижной части ИП жестко крепится стрелка 2, которая вместе со шкалой 1 образует отсчетное устройство, позволяющее определять числовые значения измеряемых величин по углу поворота a подвижной части преобразователя. Уравнение преобразования (уравнение шкалы) магнитоэлектрического преобразователя:
где Si - чувствительность ИМ по току. Выводы о свойствах магнитоэлектрических преобразователей: - угол отклонения стрелки прямо пропорционален току, протекающему по катушке; - при изменении направления протекания тока на обратное будет изменяться и направление отклонения подвижной части; - чувствительность магнитоэлектрических ИП постоянна и может быть повышена за счет увеличения магнитной индукции в зазоре, площади и числа витков катушки или уменьшения удельного противодействующего момента упругих элементов; - собственное потребление мощности магнитоэлектрическими преобразователем вследствие их высокой чувствительности мало. Рисунок – Магнитоэлектрический логометрический преобразователь
При протекцию по катушкам 1 и 2 токов, например I1 и I2, их магнитные воля, взаимодействуя о полем в зазоре, где находятся катушки, создают моменты М1 и М2. Направление токов I1 и I2 выбираются такими, чтобы указанные моменты были направлены противоположно друг другу. Эти моменты должны зависеть от угла a поворота подвижной части. Наиболее просто зависимости М1 и М2 от a можно добиться созданием в зазоре неравномерного поля, у которого В является функцией утла a. Моменты, действующие на подвижную часть логометрического преобразователя, можно выразить : М1 = В(a)s1w1I1; M2 = B(a)s2w2I2,
где S1, w1 и S2, w2 - параметры первой и второй катушек соответственно; b - угол между катушками.
При отсутствии токов в катушках подвижная часть логометрического преобразователя может находиться в произвольном положении, так как механизм не содержит упругих элементов (спиральных пружин), однозначно определяющих начальное положение подвижной части преобразователя. Рисунок В.1 - Традиционные аналоговые устройства индикации Аналоговое устройство индикации не только показывает значение отклонения, но и обеспечивает наглядное отображение тенденции изменения отклонения во времени. Цифровое же устройство индикации, напротив, не годится для отображения тенденции изменения измеряемой величины. Таким образом, аналоговое устройство является не только индикатором значения величины, но также и устройством, воспроизводящим направление изменения. При этом абсолютная (DП) погрешность, выражаемая в единицах преобразуемой величины и определяемая как DП = ХП – Q, и относительная (dП) погрешность, определяемая кА отношение абсолютной погрешности к истинному значению преобразованной величины: Приведенная погрешность определяется как отношение Dп к некоторому нормирующему значению ХN и выражается в процентах
где DП – абсолютная погрешность преобразователя; ХN – предел преобразования. Относительная погрешность показаний прибора для трех различных вариантов определения погрешности, указываемой в технических характеристиках для аналогового устройства индикации с линейной шкалой
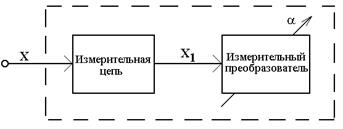
Структурная схемам электромеханического измерительного преобразователя
Все электромеханические преобразователи в зависимости от принципа действия, т.е. от способа преобразования электромагнитной энергии измерительного сигнала в механическую энергию перемещения подвижной части преобразователя, можно дифференцировать на следующие основные группы: - магнитоэлектрические преобразователи; - электродинамические преобразователи; - электромагнитные преобразователи; - электростатические преобразователи; - индукционные преобразователи. Принцип действия всех электромагнитных преобразователей основан на взаимодействии магнитного поля тока, протекающего в катушке, с ферромагнитным сердечником.Все конструктивные разновидности электромагнитных ИП можно свести к двум основным типам (рисунок 4.1).
Рисунок 4.1 – Электромагнитные измерительные преобразователи
Преобразователи с плоской катушкой (рисунок 4.1,а) состоят из катушки 2, в магнитном поле которой находится ферромагнитный сердечник 1 в форме усеченного диска или язычка, эксцентрически закрепленный на оси подвижной части. При протекании по катушке тока ферромагнитный сердечник втягивается в магнитный зазор катушки, поворачивая при этом ось 3 с закрепленным на ней успокоителем 4 и стрелку 5 в сторону увеличения показаний. Регулировка угла отклонения подвижной части осуществляется с помощью магнитного шунта 6. Преобразователи с круглой катушкой (рисунок 4.1,б) состоят из катушки 1, подвижного 2 и неподвижного 3 ферромагнитных сердечников, форма которых определяется необходимостью получения требуемого характера шкалы преобразователя. При протекании по катушке тока подвижный и неподвижный сердечники намагничиваются одноименно. Подвижный сердечник отталкивается от неподвижного, поворачиваясь вместе с осью 4 и закрепленной на ней стрелкой 6. Причем сила отталкивания оказывается прямо пропорциональной значению тока, протекающего по катушке. Противодействующий момент создается с помощью спиральной пружины 5. Успокоение подвижной части осуществляется воздушным (крыльчатым) успокоителем, состоящим из закрытой камеры 7 и легкого алюминиевого крыла 8, жестко связанного с осью 4 подвижной части. Достоинством таких преобразователей является их простота, высокая технологичность изготовления и возможность получения требуемого характера шкалы (за счет выбора формы сердечников..
Уравнение шкалы электромагнитного преобразователя:
Из проведенного рассмотрения можно сделать некоторые выводы о свойствах, достоинствах и недостатках электромагнитных преобразователей: - электромагнитные преобразователи могут применяться для измерений в цепях как постоянного, так и переменного токов, так как направление отклонения подвижной части не зависит от направления тока в обмотке; - точность электромагнитных преобразователей сравнительно невысокая вследствие влияния потерь в сердечниках, внешних магнитных полей, температуры окружающей среды и частоты измеряемых электрических величин; - чувствительность электромагнитных преобразователей за исключением преобразователей с замкнутым магнитопроводом невысока, следовательно, собственное потребление мощности от источников преобразуемых сигналов у них довольно значительное; - функция преобразования электромагнитных преобразователей по своему характеру является квадратичной, однако соответствующим выбором формы и местом расположения сердечника; - электромагнитные преобразователи наиболее просты по своей конструкции, имеют низкую стоимость и надежны в работе; - электромагнитные преобразователи способны выдерживать длительные электрические перегрузки;
Рисунок В.1 - Традиционные аналоговые устройства индикации Аналоговое устройство индикации не только показывает значение отклонения, но и обеспечивает наглядное отображение тенденции изменения отклонения во времени. Цифровое же устройство индикации, напротив, не годится для отображения тенденции изменения измеряемой величины. Таким образом, аналоговое устройство является не только индикатором значения величины, но также и устройством, воспроизводящим направление изменения. При этом абсолютная (DП) погрешность, выражаемая в единицах преобразуемой величины и определяемая как DП = ХП – Q, и относительная (dП) погрешность, определяемая кА отношение абсолютной погрешности к истинному значению преобразованной величины: Приведенная погрешность определяется как отношение Dп к некоторому нормирующему значению ХN и выражается в процентах
где DП – абсолютная погрешность преобразователя; ХN – предел преобразования. Относительная погрешность показаний прибора для трех различных вариантов определения погрешности, указываемой в технических характеристиках для аналогового устройства индикации с линейной шкалой
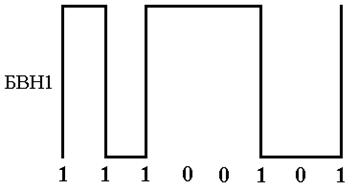
Структурная схемам электромеханического Регистрация измерительной информации. Магнитная запись и воспроизведение цифровых сигналов. Запись данных по способу без возвращения к нулю. Устройство и принцип действия измерительных преобразователей. Магнитная запись цифровой информации требует преобразования аналоговой или цифровой информации в специальный цифровой код, удобный для передачи по каналу магнитной записи. Этот канал имеет свои особенности, и не всякий код оптимален для передачи по нему цифровых данных. Например, при постоянстве намагниченности носителя как в положительном, так и в отрицательном направлении сигнал на выходе магнитной головки воспроизведения отсутствует и возникает только при переходе намагниченности от одного направления к другому. Известно много различных способов кодирования и записи цифровых данных на магнитный носитель. Остановимся на трех: запись без возвращения к нулю (БВН1), запись с фазовой модуляцией (ФМ) и запись с групповым кодированием (ГК). В порядке перечисления в этих способах возрастает плотность записи и эффективность обнаружения ошибок, а также уменьшается межблочное расстояние на ленте. Характеристики способов для записи по 8 дорожкам на ленту шириной 12,65 мм. Запись данных по способу без возвращения к нулю (БВН1) показана на рисунке 1.5. Записываемая единица в данном случае представляет собой перепад тока записи в режиме от положительного до отрицательного насыщения (или наоборот), которому соответствует изменение направления намагниченности и магнитного потока ленты (переход потока). Нуль представляет собой отсутствие изменения тока в соответствующие моменты времени. Для идентификации нулей в этом способе требуется синхросигнал. Если он вырабатывается из импульсов, воспроизводимых с разных дорожек, то плотность записи ограничивается динамическим перекосом ленты.
Рисунок 1.5 - Изменение тока записи и намагниченности носителя при записи цифровых данных по способам БВН1
Регистрация измерительной информации. Магнитная запись и воспроизведение цифровых сигналов. Способ записи по способу с фазовой модуляцией. Устройство и принцип действия измерительных преобразователей. Магнитная запись цифровой информации требует преобразования аналоговой или цифровой информации в специальный цифровой код, удобный для передачи по каналу магнитной записи. Этот канал имеет свои особенности, и не всякий код оптимален для передачи по нему цифровых данных. Например, при постоянстве намагниченности носителя как в положительном, так и в отрицательном направлении сигнал на выходе магнитной головки воспроизведения отсутствует и возникает только при переходе намагниченности от одного направления к другому. Известно много различных способов кодирования и записи цифровых данных на магнитный носитель. Остановимся на трех: запись без возвращения к нулю (БВН1), запись с фазовой модуляцией (ФМ) и запись с групповым кодированием (ГК). В порядке перечисления в этих способах возрастает плотность записи и эффективность обнаружения ошибок, а также уменьшается межблочное расстояние на ленте. Характеристики способов для записи по 8 дорожкам на ленту шириной 12,65 мм.
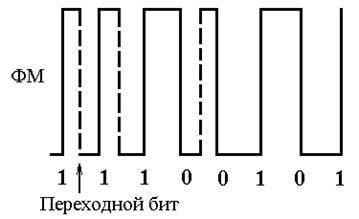
Рисунок 1.5 - Изменение тока записи и намагниченности носителя при записи цифровых данных по способам ФМ В способе записи с фазовой модуляцией (см. рисунок 1.5) записываемая единица представляет собой перепад тока записи в одном направлении, например, в режиме от отрицательного до положительного насыщения, а нуль - перепад тока в обратном направлении. Поскольку разнонаправленным перепадам тока записи при воспроизведении соответствуют импульсы ЭДС головки различной полярности, то внешнего источника синхроимпульсов для идентификации нулей не требуется; каждая дорожка оказывается самосинхронизированной. Следовательно, устойчивая работа аппаратуры записи обеспечивается при относительно малом расстоянии между переходами потока. Поэтому рассматриваемый способ ФМ позволяет получить более высокую плотность записи, которая составляет 63 бит/мм. Недостаток способа ФМ в том, что одному биту соответствует не один, как в способе БВН1, а два перехода потока. Это понятно, поскольку для записи 1 после 1 или 0 после 0 необходимо изменить направление намагниченности ленты, что достигается записью дополнительного перепада тока с удвоенной плотностью (см. рисунок). Поэтому, например, для записи с плотностью 63 бит/мм надо, чтобы лента допускала физическую плотность записи в 126 переходов потока на 1 мм (пп/мм). Преобразователи электрических величин в неэлектрические. Принцип работы, устройство и характеристики магнитоэлектрического ИП. Преобразователи электрических величин в неэлектрические – это техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи.
а - приборы с фиксированной шкалой и вращательным или поступательным движением указателя; б - сложное аналоговое устройство отображения (искусственный горизонт) Рисунок - Традиционные аналоговые устройства индикации Аналоговое устройство индикации не только показывает значение отклонения, но и обеспечивает наглядное отображение тенденции изменения отклонения во времени. Цифровое же устройство индикации, напротив, не годится для отображения тенденции изменения измеряемой величины. Таким образом, аналоговое устройство является не только индикатором значения величины, но также и устройством, воспроизводящим направление изменения. При этом абсолютная (DП) погрешность, выражаемая в единицах преобразуемой величины и определяемая как DП = ХП – Q, и относительная (dП) погрешность, определяемая кА отношение абсолютной погрешности к истинному значению преобразованной величины: ,,,,,,,,,,,,,,,,, Приведенная погрешность определяется как отношение Dп к некоторому нормирующему значению ХN и выражается в процентах ,,,,,,,,,,,,,,,,,,,,,,,,,,,,
где DП – абсолютная погрешность преобразователя; ХN – предел преобразования.
Относительная погрешность показаний прибора для трех различных вариантов определения погрешности, указываемой в технических характеристиках для аналогового устройства индикации с линейной шкалой
Структурная схемам электромеханического измерительного преобразователя Все электромеханические преобразователи в зависимости от принципа действия, т.е. от способа преобразования электромагнитной энергии измерительного сигнала в механическую энергию перемещения подвижной части преобразователя, можно дифференцировать на следующие основные группы: - магнитоэлектрические преобразователи; - электродинамические преобразователи;- электромагнитные преобразователи; - электростатические преобразователи;- индукционные преобразователи. Принцип действия магнитоэлектрических преобразователей основан на взаимодействии магнитных полей постоянного магнита и проводника с током, конструктивно выполненного в виде катушки (рамки). Практически все магнитоэлектрические преобразователи можно разделить на две основные разновидности: - преобразователи с подвижной катушкой и неподвижным магнитом; - преобразователи с неподвижной катушкой и подвижным магнитом. Конструктивно преобразователи обеих разновидностей могут быть выполнены: - с внешним (по отношению к рамке) магнитом; - с внутрирамочным (внутренним) магнитом.
Катушка 5 с числом витков w и площадью витка s находится в магнитном зазоре с равномерным радиальным магнитным полем. Поле в зазоре создается с помощью магнитной системы, состоящей из постоянного магнита 7, полюсных наконечников с цилиндрической расточкой 6 и цилиндрического сердечника 4 из магнитомягкого материала. Благодаря введению в магнитную систему сердечника 4, поле в зазоре, где движется рамка, получается однородным. Подвижная часть крепятся на полуосях и керновых опорах. Катушка 5 наматывается на легком алюминиевом каркасе и жестко крепится на полуосях. При движении катушки в магнитном зазоре в каркасе возникают вихревые токи, создающие момент успокоения . На оси подвижной части ИП жестко крепится стрелка 2, которая вместе со шкалой 1 образует отсчетное устройство, позволяющее определять числовые значения измеряемых величин по углу поворота a подвижной части преобразователя. Уравнение преобразования (уравнение шкалы) магнитоэлектрического преобразователя:
где Si - чувствительность ИМ по току. Выводы о свойствах магнитоэлектрических преобразователей: - угол отклонения стрелки прямо пропорционален току, протекающему по катушке; - при изменении направления протекания тока на обратное будет изменяться и направление отклонения подвижной части; - чувствительность магнитоэлектрических ИП постоянна и может быть повышена за счет увеличения магнитной индукции в зазоре, площади и числа витков катушки или уменьшения удельного противодействующего момента упругих элементов; - собственное потребление мощности магнитоэлектрическими преобразователем вследствие их высокой чувствительности мало. Рисунок – Магнитоэлектрический логометрический преобразователь
При протекцию по катушкам 1 и 2 токов, например I1 и I2, их магнитные воля, взаимодействуя о полем в зазоре, где находятся катушки, создают моменты М1 и М2. Направление токов I1 и I2 выбираются такими, чтобы указанные моменты были направлены противоположно друг другу. Эти моменты должны зависеть от угла a поворота подвижной части. Наиболее просто зависимости М1 и М2 от a можно добиться созданием в зазоре неравномерного поля, у которого В является функцией утла a. Моменты, действующие на подвижную часть логометрического преобразователя, можно выразить : М1 = В(a)s1w1I1; M2 = B(a)s2w2I2,
где S1, w1 и S2, w2 - параметры первой и второй катушек соответственно; b - угол между катушками.
При отсутствии токов в катушках подвижная часть логометрического преобразователя может находиться в произвольном положении, так как механизм не содержит упругих элементов (спиральных пружин), однозначно определяющих начальное положение подвижной части преобразователя. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 304; Нарушение авторского права страницы
 .
. 100 %,
100 %,
 ; (2.4)
; (2.4) , (2.5)
, (2.5)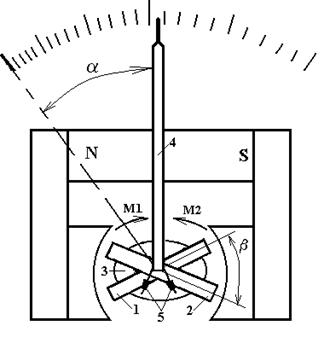
 .
.



 . (4.2)
. (4.2) 100 %,
100 %,