
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Преобразователи электрических величин в неэлектрические. Принцип работы, устройство и характеристики электромагнитных ИП.
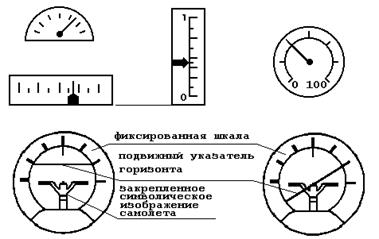
а - приборы с фиксированной шкалой и вращательным или поступательным движением указателя; б - сложное аналоговое устройство отображения (искусственный горизонт) Рисунок В.1 - Традиционные аналоговые устройства индикации Аналоговое устройство индикации не только показывает значение отклонения, но и обеспечивает наглядное отображение тенденции изменения отклонения во времени. Цифровое же устройство индикации, напротив, не годится для отображения тенденции изменения измеряемой величины. Таким образом, аналоговое устройство является не только индикатором значения величины, но также и устройством, воспроизводящим направление изменения. При этом абсолютная (DП) погрешность, выражаемая в единицах преобразуемой величины и определяемая как DП = ХП – Q, и относительная (dП) погрешность, определяемая кА отношение абсолютной погрешности к истинному значению преобразованной величины: Приведенная погрешность определяется как отношение Dп к некоторому нормирующему значению ХN и выражается в процентах
где DП – абсолютная погрешность преобразователя; ХN – предел преобразования. Относительная погрешность показаний прибора для трех различных вариантов определения погрешности, указываемой в технических характеристиках для аналогового устройства индикации с линейной шкалой
Структурная схемам электромеханического измерительного преобразователя
Все электромеханические преобразователи в зависимости от принципа действия, т.е. от способа преобразования электромагнитной энергии измерительного сигнала в механическую энергию перемещения подвижной части преобразователя, можно дифференцировать на следующие основные группы: - магнитоэлектрические преобразователи; - электродинамические преобразователи; - электромагнитные преобразователи; - электростатические преобразователи; - индукционные преобразователи. Принцип действия всех электромагнитных преобразователей основан на взаимодействии магнитного поля тока, протекающего в катушке, с ферромагнитным сердечником.Все конструктивные разновидности электромагнитных ИП можно свести к двум основным типам (рисунок 4.1).
Рисунок 4.1 – Электромагнитные измерительные преобразователи
Преобразователи с плоской катушкой (рисунок 4.1,а) состоят из катушки 2, в магнитном поле которой находится ферромагнитный сердечник 1 в форме усеченного диска или язычка, эксцентрически закрепленный на оси подвижной части. При протекании по катушке тока ферромагнитный сердечник втягивается в магнитный зазор катушки, поворачивая при этом ось 3 с закрепленным на ней успокоителем 4 и стрелку 5 в сторону увеличения показаний. Регулировка угла отклонения подвижной части осуществляется с помощью магнитного шунта 6. Преобразователи с круглой катушкой (рисунок 4.1,б) состоят из катушки 1, подвижного 2 и неподвижного 3 ферромагнитных сердечников, форма которых определяется необходимостью получения требуемого характера шкалы преобразователя. При протекании по катушке тока подвижный и неподвижный сердечники намагничиваются одноименно. Подвижный сердечник отталкивается от неподвижного, поворачиваясь вместе с осью 4 и закрепленной на ней стрелкой 6. Причем сила отталкивания оказывается прямо пропорциональной значению тока, протекающего по катушке. Противодействующий момент создается с помощью спиральной пружины 5. Успокоение подвижной части осуществляется воздушным (крыльчатым) успокоителем, состоящим из закрытой камеры 7 и легкого алюминиевого крыла 8, жестко связанного с осью 4 подвижной части. Достоинством таких преобразователей является их простота, высокая технологичность изготовления и возможность получения требуемого характера шкалы (за счет выбора формы сердечников..
Уравнение шкалы электромагнитного преобразователя:
Из проведенного рассмотрения можно сделать некоторые выводы о свойствах, достоинствах и недостатках электромагнитных преобразователей: - электромагнитные преобразователи могут применяться для измерений в цепях как постоянного, так и переменного токов, так как направление отклонения подвижной части не зависит от направления тока в обмотке; - точность электромагнитных преобразователей сравнительно невысокая вследствие влияния потерь в сердечниках, внешних магнитных полей, температуры окружающей среды и частоты измеряемых электрических величин; - чувствительность электромагнитных преобразователей за исключением преобразователей с замкнутым магнитопроводом невысока, следовательно, собственное потребление мощности от источников преобразуемых сигналов у них довольно значительное; - функция преобразования электромагнитных преобразователей по своему характеру является квадратичной, однако соответствующим выбором формы и местом расположения сердечника; - электромагнитные преобразователи наиболее просты по своей конструкции, имеют низкую стоимость и надежны в работе; - электромагнитные преобразователи способны выдерживать длительные электрические перегрузки;
|
Последнее изменение этой страницы: 2019-04-10; Просмотров: 251; Нарушение авторского права страницы
 Преобразователи электрических величин в неэлектрические – это техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи.
Преобразователи электрических величин в неэлектрические – это техническое средство с нормативными метрологическими характеристиками, служащее для преобразования измеряемой величины в другую величину или измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи. .
. 100 %,
100 %,



 . (4.2)
. (4.2)