
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Измерительного преобразователя. магнитоэлектрические преобразователи. Все электромеханические преобразователи в зависимости от принципа действия
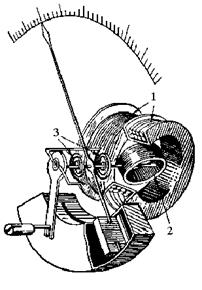
Все электромеханические преобразователи в зависимости от принципа действия, т.е. от способа преобразования электромагнитной энергии измерительного сигнала в механическую энергию перемещения подвижной части преобразователя, можно дифференцировать на следующие основные группы: - магнитоэлектрические преобразователи; - электродинамические преобразователи; - электромагнитные преобразователи; - электростатические преобразователи; - индукционные преобразователи. Принцип действия электродинамических преобразователей основан на взаимодействии магнитных полей токов, протекающих по неподвижной и подвижной катушкам (или системам катушек). Электродинамический преобразователь, конструкция которого и схема соединения катушек приведены на рисунке 3.1,а,б соответственно.
Рисунок 3.1 – Электродинамический преобразователь Неподвижные катушки 1, как правило, выполняют из двух секций, разнесенных в пространстве.Выполняются неподвижные катушки, как правило, из медного провода. Подвижная катушка 2 выполняется из медного или алюминиевого провода и размещается внутри неподвижной. Токопроводящими проводниками подвижной катушки служат упругие элементы (спиральные пружины 3), создающие механический противодействующий момент, или безмоментные проводники в логометрах. Для создания необходимой степени успокоения подвижной части в электродинамических преобразователях используют воздушные или магнитоиндукционные (при наличии магнитного экрана) успокоители. Функция преобразования электродинамического преобразователя для переменных токов запишется в виде
Можно сделать некоторые выводы о свойствах, достоинствах и недостатках электродинамических преобразователей: - угол отклонения подвижной части электродинамических преобразователей пропорционален произведению среднеквадратических значений токов, протекающих по неподвижной и подвижной катушкам; - функция преобразования электродинамических ИП нелинейна, так как характер ее определяется произведением токов в катушках и законом изменения взаимной индуктивности при повороте подвижной катушки; - электродинамические преобразователи в отличие от ИП других групп имеют две цепи протекания тока, и угол отклонения подвижной части в них определяется произведением токов в катушках и фазовым сдвигом между этими токами, т.е. преобразователи обладают множительными и фазочувствителъными свойствами и могут служить основой для создания не только вольтметров и амперметров, но и ваттметров, фазометров и других приборов; - возникновение вращающего момента в электродинамических ИП обусловливается взаимодействием магнитных потоков в воздухе, а не в ферромагнитных сердечниках, обладающих такими нежелательными свойствами, как явления гистерезиса вихревых токов, нелинейности характеристик и др. Поэтому у указанных преобразователей отсутствуют погрешности, характерные для преобразователей с ферромагнитными сердечниками, и приборы, выполненные на их основе, могут быть изготовлены с высоким классом точности; - чувствительность электродинамических ИП невысока вследствие того, что МВР создается слабыми магнитными потоками, действующими в воздухе. Значит, собственное потребление мощности у электродинамических преобразователей достаточно велико; - у электродинамических ИП могут возникать большие погрешности из-за влияния внешнего магнитного поля, так как собственное магнитное поле у них мало. Целый ряд электродинамических приборов создается на основе логометрического преобразователя. Электродинамический логометрический преобразователь (рисунок 3.2) состоит из неподвижной двухсекционной катушки 1 и двух жестко закрепленных на оси подвижных катушек 2 и 3. Токи I1 и I2 подводятся к подвижным катушкам с помощью безмоментных проводников. Направления токов выбираются такими, чтобы моменты M1 и M2, возникающие в результате взаимодействия магнитных полей каждого из токов с магнитным полем тока I в неподвижной катушке, вызывали взаимно противоположные перемещения подвижной части. Отсчет преобразованных значений тока производится с помощью стрелки 4, закрепленной на оси преобразователя, и шкалы 5.
Рисунок 3.2 – Электродинамический преобразователь с электрическим противодействующим моментом (логометр) Уравнение шкалы электродинамического логометра запишется в виде
Таким образом, угол поворота подвижной части электродинамического логометра определяется отношением проекций токов I1, I2 в его подвижных катушках на направление тока I в неподвижной катушке. Однако электродинамические преобразователи, как с механическим противодействующим моментом, так и логометры, обладают низкой чувствительностью и значительным собственным потреблением мощности. |
Последнее изменение этой страницы: 2019-04-10; Просмотров: 257; Нарушение авторского права страницы

 .
.
 , (3.9)
, (3.9)