|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Организация радиолокационного наблюдения
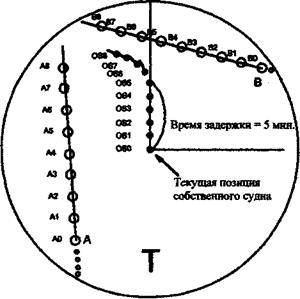
Организация радиолокационного наблюдения, в том числе в условиях хорошей видимости, должна соответствовать требованию Правила 5 МППСС - 72 об использовании для наблюдения всех имеющихся средств, с тем, чтобы полностью оценить ситуацию и опасность столкновения. Всестороннее использование РЛС - важного средства заблаговременного обнаружения других судов-целей и определения степени опасности — является одной из мер предосторожности, пренебрежение которыми может быть поставлено в вину на основании Правила 2 МППСС - 72. Радиолокационное наблюдение организуется совместно с другими видами наблюдения - зрительными и слуховыми, не заменяя, а дополняя их. При ограниченной видимости организация радиолокационного наблюдения обязательна. Термин «ограниченная видимость» означает любые условия, при которых видимость ограничена из-за тумана, мглы, снегопада, сильного ливня, песчаной бури или по каким-либо другим причинам - Правила 3 МППСС 72. Ночью, даже в условиях хорошей видимости, целесообразно использовать судовые радиолокационные средства в прибрежных водах и при следовании районами, где возможна встреча с малыми рыболовными судами, яхтами, буровыми платформами или другими сооружениями, которые не всегда освещены надлежащим образом. При плавании в узкостях и в районах интенсивного движения судов использование РЛС обязательно в любых условиях плавания. Каждое судно должно всегда следовать с безопасной скоростью с тем, чтобы оно могло предпринять надлежащее и эффективное действие для предупреждения столкновения и могло быть остановлено в пределах расстояния, требуемого при существующих обстоятельствах и условиях. Правило 6 МППСС - 72, перечисляя факторы, которые надлежит учитывать при выборе безопасной скорости, выделяет группу факторов, связанных с использованием РЛС: - характеристики, эффективность и ограничения радиолокационного оборудования; любые ограничения, накладываемые используемой шкалой дальности; - влияние на радиолокационное обнаружение состояния моря и метеорологических факторов, а также других источников помех; - возможность того, что радиолокатор не может обнаружить на достаточном расстоянии малые суда, лед и другие плавающие объекты; - количество, местоположение и перемещение судов, обнаруженных радиолокатором - более точную оценку видимости, которая может быть получена при радиолокационном измерении расстояния до судов или других объектов, находящихся поблизости. Радиолокационное наблюдение не освобождает судоводителя от подачи звуковых сигналов, предписанных МППСС -72. Обнаружив в результате наблюдения, в том числе радиолокационного, другие суда-цели, судоводитель должен в соответствии с Правилом 7 МППСС -72 оценить наличие опасности столкновения, используя для этой цели все имеющиеся средства. При определении наличия опасности столкновения необходимо, прежде всего, учитывать следующее: • опасность столкновения должна считаться существующей, если пеленг приближающегося судна заметно не изменяется; • опасность столкновения может иногда существовать даже при заметном изменении пеленга, в частности при сближении с очень большим судном или буксиром или при сближении судов на малое расстояние. Неправильное использование или не использование РЛС для предупреждения столкновения является фактором, усугубляющим вину в случае столкновения судов. При организации радиолокационного наблюдения учитывается: • район плавания, включая наличие навигационных опасностей, ограничиваюших маневрирование; • допустимые значения Дкр. и Ткр сближения, а также других критериев опасности • линейные и временные элементы возможных маневров судна; • технические и эксплуатационные характеристики и ограничения судовых радиолокационных средств с учетом влияния на них изменения конкретных условий плавания. Использование РЛС наиболее эффективно, если радиолокационное наблюдение ведется непрерывно, т.е. цели обнаруживаются сразу же после их появления на экране, в противном случае цели могут быть обнаружены на значительно меньшем расстоянии или вовсе не обнаружены с помощью РЛС. Перерыв между наблюдениями за экраном РЛС зависит от района плавания, скорости хода, дистанции обнаружения объектов, взаимного положения, относительной скорости сближения. Правильная организация радиолокационного наблюдения с всесторонним использованием РЛС, а также радиолокационной прокладкой на маневренном планшете или средствами автоматизированной радиолокационной прокладки (САРП) позволяет: - своевременно обнаруживать цели, их положение; - выбрать маневр для расхождения; - контроль эффективности маневра в период его расхождения; - вводить, при необходимости, дополнительную корректуру для обеспечения безопасности плавания; - безопасно вернуться на заданный или другой путь следования; - ввести режим «Охранной зоны»; - выполнить проигрывание маневра «TRIAL». Отличительной чертой деятельности судоводителя является специфичность ориентировки. В современных условиях судоводитель, управляющий судном, должен уметь обобщать полученные от приборов и путем визуального наблюдения сведения, увязывать в одно целое происходящее событие и создавать на его основе, так называемые схемы предвидения. Перед выполнением какого-либо действия он должен мысленно представить, что именно он сделает, какую команду подаст и каков будет результат. 5.1.1 Охранная зона – это установленные на экране с помощью курсора (EBRL) или подвижных кругов дальности (VRM) границы по дальности и направлению. При работе в режиме «охранная зона» в случае пересечения другим судном установленной границы охранной зоны автоматически срабатывает звуковая сигнализация. В случае сопряжения РЛС с САРП, последняя, при входе целей в охранную зону обеспечивает их автоматический захват и определение элементов движения. Режим САРП обеспечивает полноценную автоматическую радиолокационную прокладку, как того требуют Резолюции IМО А.823(19) и IEC 60972-1, включая показ дальности, пеленга, курса, скорости, СРА и ТСРА для всех прокладываемых целей. В прямоугольнике данных САРП (см. рис.2.11) в этом случае показываются следующие значения параметров выбранной цели: - RNG/ BRG: Дистанция и Пеленг от собственного судна на выбранную цель; - CSE/ SRD: Курс и Скорость для выбранной цели; - CPA/ТСРА: СРА (Точка Наибольшего Сближения) - наименьшая дистанция, на которую цель приблизится к вашему судну. ТСРА - время до СРА. Оба значения рассчитываются автоматически. Если судно цели чисто разошлось с вашим судном, то это указывается в виде ТСРА с отрицательным знаком (-). ТСРА рассчитывается до 99.9мин, а если значение больше, то показывается ТСРА>-99.9мин.; - BCR/ВСТ: BCR - это наименьшая расчетная дистанция, на которой выбранная цель пересечет курс вашего судна. ВСТ - это расчетное время, через которое цель пересечет курс вашего судна. 5.1.2. Режим « TRIAL» позволяет проиграть на экране индикатора развитие ситуации расхождения, Для этого необходимо ввести в САРП новый курс, скорость и время на которое будет рассчитано расхождение. Данные вводятся только после того, как САРП определила элементы движения целей. Режим удобен тем, что судоводитель имеет возможность предварительно просмотреть различные варианты расхождения. Режим «TRIAL» имитирует воздействие маневра собственного судна на все сопровождаемые цели, не прерывая обновление информации о цели. Имеются два типа проигрывания маневра: Статическое и Динамическое. Динамическое проигрывание маневра показывает расчетные позиции сопровождаемых целей и собственного судна. Для этого назначенные скорость и курс собственного судна должны вводиться с определенным «временем задержки». В предположении, что все сопровождаемые цели сохраняют свои текущие скорости и курсы, будущее движение собственного судна и сопровождаемых целей имитируется с приращениями в 1 секунду, указывая их расчетные позиции с 1-минутными интервалами, как показано ниже. Время задержки представляет запаздывание времени от текущего момента времени до момента реального изменения скорости и/или курса собственного судна. Следовательно, необходимо принять во внимание маневренные характеристики (запаздывание руля, запаздывание поворота и запаздывание ускорения). Особенно важно это на больших судах. Независимо от величины установленной задержки, развитие ситуации начинается непосредственно и заканчивается через минуту. В нижеприведенном примере собственное судно будет двигаться прямо вперед (даже после маневра) в течение времени задержки 5 мин, а затем изменит скорость и курс до достижения указанных оператором назначенных скорости и курса (в нашем пример, позиция О87).
Динамическое Проигрывание Маневра Следует отметить, что, инициировав динамическое проигрывание, нельзя изменить пробные скорость и курс собственного судна или время задержки, пока не завершится проигрывание маневра. Статическое проигрывание маневра показывает только финальную ситуацию имитации маневра. Если ввести те же самые значения пробной скорости, курса и времени задержки, как в вышерассмотренном примере динамического проигрывания, экран мгновенно покажет позицию О87 для собственного судна, позицию А7 для цели А и позицию В7 для цели В, опустив промежуточные позиции. Т.о., статическое проигрывание маневра удобно, когда необходимо мгновенно узнать результат маневра. Примечание: Для точной имитации движений судна при Проигрывании Маневра, нужно правильно ввести маневренные характеристики собственного судна в исходных установках в процессе установки РЛС на судне и выполнении пуско-наладочных работ. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 366; Нарушение авторского права страницы