|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Принцип работы приемного модуля СНС навигаторов
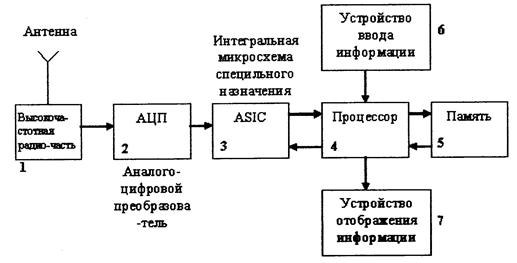
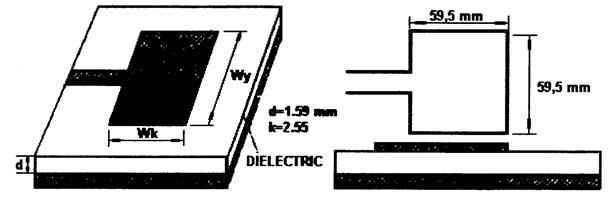
Современные приемные модули СНС навигаторов, по сути, являются аналого-цифровыми системами. Переход на цифровую обработку осуществляется на одной из промежуточных частот. Типовая структурная схема приемного модуля (см. рис.2.17) состоит из 4-х функциональных частей: - антенны; - радиочастотной части; - цифрового блока корреляционной обработки (ASIC); - навигационного вычислителя (процессора). Рассмотрим подробнее составляющие части схемы. Наибольшее применение, в частотном УКВ-диапазоне L (1…2ГГц) получили антенны на основе микрополосковых линий (МПЛ), обладающие малыми габаритными размерами и простотой изготовления. Микрополосковая антенна (см. рис.3.16) состоит из 2-х параллельных проводящих слоев, разделенных диэлектриком. Нижний проводящий слой является заземленной плоскостью, а верхний излучателем антенны. По форме излучатель может быть прямоугольником, как показано на рисунке, эллипсоидом и т.д. ( Размер 59,5мм соответствует половине длины волны на частоте 1227,6 МГц. Как известно, в УКВ-диапазоне конструктивные
Рис.2.17. Структурная схема приемного модуля СНС навигатора. размеры антенн жестко связаны с длиной волны). Такая антенна обеспечивает всенаправленный прием сигналов. В качестве материала в основном используется двухсторонний фольгированный фторопласт, обладающий минимальными диэлектрическими потерями.
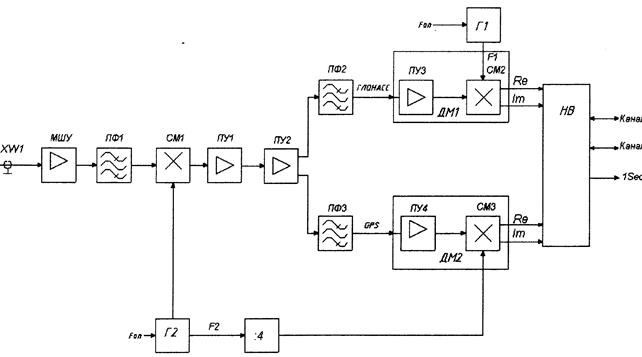
Рис.2.18. Конструкция микрополосковой антенны стандарта GPS/ GLONASS Конечно, это далеко не единственный вариант конструкции антенны. Но при всем многообразии антенн, применяемых в приемном модуле морских навигаторов, помимо общих требований к конструкции, они должны обладать и многими общими техническими характеристиками. Основные из которых: - рабочий диапазон частот ~ 1570…1625 МГц, т.е. антенны должны быть достаточно широкополосными; - обеспечение работы в тракте с волновым сопротивлением ρ = 50 Ом, поскольку в качестве приемного фидера используется, как правило, коаксиальный кабель имеющий волновое сопротивлением 50 Ом, входное сопротивление приемника также 50 Ом. - коэффициент стоячей волны КСВ не более 2; - минимальное значение коэффициента усиления не менее 5…8 дБ; - антенны должны обеспечивать всенаправленный прием сигналов. В антенну обычно встраивается предварительный усилитель сигнальной радиочастоты, который необходим для усиления сигнала до уровня, обеспечивающего полную компенсацию потерь в кабеле, чтобы на входе приемника он был различим на фоне собственных шумов приемника. Для этого предварительный усилитель ( при длине коаксиального кабеля 20..40 м) должен иметь коэффициент усиления порядка 30…40 дБ и коэффициент шума кш ≤ 2,5. Обычно под радиочастотной частью понимают совокупность входных усилителей и фильтров ( Рге Amplifier), систему 2- или 3-кратного преобразования частоты (Down Converter) и АЦП (A/D Converter). При использовании многоуровневых АЦП возникает необходимость в автоматической регулировке усиления (Automatic Gain Control –AGC)). В радиочастотной части сигналы, принятые антенной, предварительно усиливаются и фильтруются во всей полосе (от 1570 до 1625 МГц) для совмещённых приемников сигнальных (несущих) частот с помощью предварительного усилителя и полосового фильтра. Принятый высокочастотный сигнал в радиочастотной части преобразовывают - переносят на промежуточную частоту, затем в цифроаналоговом преобразователе аналоговый сигнал на второй или третьей промежуточной частоте преобразовывают в цифровой вид , и в цифровом виде сигнал поступает в коррелятор. Типовая функциональная схема радиочастотной части совмещенного приемника GPS/GLONASS приведена на рис.2.20. Как видно из рисунка, в радиочастотную часть приемника входят два опорных генератора (Г1, Г2), делитель частоты на 4 (:4), малошумящий усилитель (МШУ), два каскада усиления на первой промежуточной частоте (ПУ1, ПУ2),смеситель (СМ1) и два демодулятора (ДМ1, ДМ2), три полосовых фильтра (ПФ1, ПФ2 и ПФ3). Поступивший по линии передачи радиосигнал от антенного устройства усиливается малошумящим усилителем МШУ радиочастоты до величины, обеспечивающей компенсацию снижения уровня сигнала полосовым фильтром ПФ1 и смесителем СМ1. Полосовой фильтр ПФ1 выделяет принятый радиосигнал с требуемой полосой пропускания. Фильтр должен иметь высокую добротность, чтобы обеспечить эффективное подавление частот вне полосы пропускания. Полоса пропускания такого фильтра должна быть близка к прямоугольной форме. Наибольшее применение в диапазоне волн, в котором работают спутниковые системы навигации и судовые навигационные РЛС нашли фильтры на поверхностно-акустических волнах. Внешний вид устройства на ПАВ изображен на рис.2.19. Металлическая структура, нанесенная на пьезоэлектрическую подложку и показанная на рисунке, как электроды и шины, называется встречно-штыревым преобразователем (ВШП). Если к шинам ВШП подключить
Рис.2.19. Устройство на ПАВ. генератор высокочастотных электромагнитных колебаний, то на поверхности пьезокерамической подложки возникнут акустические волны, скорость распространения которых примерно в 100000 раз меньше скорости распространения электромагнитных волн. Конструкция фильтра на ПАВ имеет два ВШП (см. рис.2.21). Один из них – ПАВ2- является излучающим ВШП и к нему подключается источник входного сигнала Е. К приемному – ПАВ3- подключается нагрузка. Под действием высокочастотных электромагнитных колебаний источника сигнала в зазорах между смежными электродами излучающего преобразователя 2 возникает переменное электрическое поле, которое вследствие пьезоэффекта материала подложки 1 вызывает механические колебания в её поверхностном слое. Эти колебания распространяются по поверхности подложки в направлении, перпендикулярном электродам ВШП в виде поверхностных акустических волн (ПАВ). Достигнув ПАВ3, механические колебания воздействуя на электроды приемного преобразователя, вызовут в них появление электромагнитных колебаний, частота которых будет такой же, как и частота источника сигнала, подключенного к ПАВ2. Размеры пьезоэлектрической подложки и электродов ВШП , а также расстояние между электродами определяются длиной волны высокочастотных колебаний, подводимых к излучающему ВШП. Главное свойство пьезокерамической подложки заключается в том, что поверхностно-акустические волны, вызванные явлением пьезоэффекта, проявляются только в определенном диапазоне частот подводимых высокочастотных колебаний. Вне этого диапазона частот колебания на поверхности подложки практически не возникают. Поэтому полоса пропускания фильтра на ПАВ близка к прямоугольной форме. Как правило, подавление частот вне полосы пропускания более 40 дБ. Фильтры на ПАВ вносят достаточно большое ослабление пропускаемого через них рабочего сигнала, поэтому для восстановления уровня сигнала и его усиления до величины, обеспечивающей нормальную работу последующих каскадов, требуются усилители. С выхода ПФ1 выделенные радиосигналы поступают на смеситель СМ1, который переводит радиосигналы на промежуточные частоты. Ослабленные смесителем сигналы на промежуточных частотах усиливаются каскадами усиления ПУ1 и ПУ2. Далее, полосовой фильтр ПФ2 формирует полосу пропускания на промежуточной частоте ГЛОНАСС, а фильтр ПФ3- на промежуточной частоте GPS. В демодуляторе ДМ1 сигнал ГЛОНАСС предварительно усиливается ПУ3 и поступает на балансный фазовый демодулятор (детектор), состоящий из квадратурного смесителя СМ2 и опорного генератора Г1. Демодулятор из фазоманипулированного сигнала выделяет кодовую последовательность положительных и отрицательных прямоугольных импульсов, в которых заложена информация о параметрах НКА. Аналогичные функции по отношению к сигналу GPS выполняет демодулятор ДМ2.С той лишь разницей, что опорная частота поступает на смеситель СМ3 непосредственно от гетеродина Г2 через делитель частоты F2/4. Далее, выделенные составляющие сигналов ГЛОНАСС и GPS поступают в НВ (навигационный вычислитель), основу которого составляют коррелятор и сигнальный процессор. Во многих схемах приемников СНС коррелятор формируется на основе интегральной схемы специального назначения (см. рис.2.17) ASIC (Application Specific Integrated Circuit).Коррелятор предназначен для поиска, захвата и слежения за сигналами,
Рис.2.20.Типовая функциональная схема радиотракта совмещенного приемника GPS/GLONASS
Рис. 2.21. Конструкция фильтра на ПАВ поступающими с НКА. Поскольку компоненты сигнала на частоте L1 промодулированы двумя разными битовыми последовательностями (см. п.6.5 «Физические параметры радиосигналов»,табл.3.4), находящимися в фазовой квадратуре со сдвигом относительно друг друга на 90˚, то основной задачей коррелятора является выделение этих битовых последовательностей. Далее, выделенные корреляционные составляющие поступают в процессор для дальнейшей обработки. Процессор определяет, от каких НКА поступили сигналы, производит расчет управляющего сигнала для петель слежения за НКА, по которым будут проводиться измерения параметров навигации и закладывает эту информацию обратно в коррелятор. Процессор полностью «расшифровывает» кодовые последовательности сигналов от НКА, взятых на слежение, определяя точный код фазы и время задержки сигнала; выделяет навигационную информацию, необходимую для вычисления параметров потребителя ( координаты, курс, скорость, точное время).
Спутниковый компас Определение направления и скорости движения в СНС навигаторах выполняется в следующей последовательности:
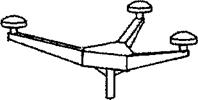
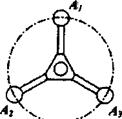
2 Фиксируется точное время, когда были определены координаты. 3 Выдерживается некоторый интервал времени. 4 Повторно определяются новые координаты судна 5 На основании координат двух точек и величины временного интервала вычисляется вектор скорости движения и его составляющие - направление и скорость. Естественно, определение направления (курсоуказания) в этом случае возможно только при движении судна. Независимое от скорости движения курсоуказание можно получить, если установить два СНС приемника с антеннами, установленными в двух точках судна на одном и том же расстоянии от ДП. Однако, более оптимальное решение найдено в установке двух или трех антенной системы, работающей на один СНС приемник. Третья антенна позволяет вместе с курсом определить углы килевой и бортовой качки, а следовательно улучшить точность измерения курса, уменьшить влияние на неё качки и рыскания. Вид трех антенной системы представлен на рис.2.22.Диаметр окружности проходящей через антенны А1, А2 и А3 примерно равен одному метру.
Рис.2.22. Трехантенная система спутникового компаса
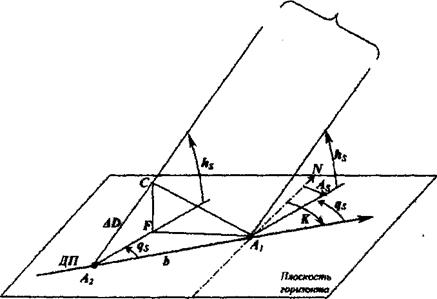
Допустим, две антенны А1 и А2 судового СНС навигатора расположены в диаметральной плоскости судна (рис.2.23). Расстояние между антеннами b составляет порядка 85см.Антенны подключены к общему СНС навигатору , процессор которого вычисляет расстояние и направление на НКА от антенн А1 и А2. По вычисленным координатам места судна и по эфемеридам НКА всегда могут быть рассчитаны его горизонтные координаты: высота h3 и азимут А3. На рис. 2.23 эти координаты показаны для одного из спутников. Расстояния, которые проходит сигнал от НКА до антенн А1 и А2 отличаются на величину ΔD. Эта разность расстояний находится по сдвигу фазы ΔФ принимаемого сигнала антеннами А1 и А2: ΔФ=Δ Ψ + n, где: n –целое число циклов, уложившихся длин волн (например,применительно к GPS при частоте сигнала F1=1575,42 МГц длина волны будет ~ 19см); ΔΨ – дробная часть цикла. Фазовым измерениям присуща многозначность, поэтому измеряется только ΔФ , а n автоматически определяется в течение первоначального периода приема сигналов. По значению ΔФ величина ΔD находится по формуле: Δ D= λ ΔФ, где: λ –длина волны принимаемого сигнала ( 19 см).
Направление на спутник Рис. 2.23. К характеристике принципа действия спутникового компаса.
Зная ΔD и высоту h 3 НКА над истинным горизонтом можно найти курсовой угол q 3 НКА и истинный курс судна К: А 2 F = ΔD Cosh 3 , q 3 = arccos A 2 F/b, K= A 3+ q 3. Как известно, для вычисления только координат судна в двух мерном измерении (режим 2D) требуется прием и обработка сигналов не менее, чем от трех НКА, а при трех мерном измерении (режим 3D) – не менее 4-х НКА. Для вычисления истинного курса судна необходимо дополнительно принять и обработать сигнал еще от одного НКА. Дополнительный НКА необходим для расчета n циклов на начальной стадии определения навигационных параметров. Таким образом, работа спутникового компаса возможна при устойчивом приеме сигналов не менее чем от пяти НКА. В случаях отсутствия устойчивого приема сигналов от необходимого количества НКА, прием которых может быть блокирован, например, высокими конструкциями или мостом, под которым проходит судно, многие спутниковые компасы имеют встроенные гироскопы или электронные магнитные компасы, обеспечивающие на время отсутствия сигналов от НКА непрерывное курсоуказание судна. Наличие встроенного вибрационного гироскопа или электронного магнитного компаса позволяет обеспечивать курсоуказание при неуверенном или отсутствующем приеме сигналов от НКА независимо от того движется судно или стоит на месте. Спутниковый компас как автономный прибор предоставляет данные о координатах судна, курсе, путевом угле, путевой скорости, углах бортовой и килевой качки. Как правило, комплект спутникового компаса состоит из следующих узлов: - антенный блок, состоящий из трех антенн, точно зафиксированных на жесткой платформе; - основной блок, в состав которого входят приемный модуль, процессорный модуль для вычисления навигационных параметров по сигналам от НКА, гироскоп или электронный магнитный компас, а также панель для управления и отображения информации. Спутниковые компасы могут использоваться вместо традиционных гирокомпасов, требовательных к техническому уходу. На работу спутникового компаса не влияют такие факторы, как скорость судна, широта местоположения, геомагнитные показатели и т.д. В отличие от традиционных гирокомпасов и магнитных компасов точность показаний спутникового компаса не зависит от силы тяжести или скорости. Более того, благодаря третьей антенне, спутниковый компас обеспечивает повышенную точность, снижая негативное влияние бортовой и килевой качке судна, а также рыскания. На рис.2.24 показан внешний вид спутникового компаса производства фирмы Furuno.
Рис.2.24. Внешний вид спутникового компаса
Отсутствие механических частей, таких как карданов подвес, избавляет от необходимости технического обслуживания компаса. Точность определения курса современных спутниковых компасов находится в пределах 0,5 …1 градус, скорость отслеживания изменения курса 25 градусов/сек.. В отличие от традиционных компасов спутниковые полностью адаптированы для работы в локальной сети Ethernet: они имеют интерфейс в формате NMEA, IEC 61162-1 для вывода данных о курсе в РЛС/САРП, АИС, ЭКНИС, в гидролокаторы, эхолоты, картплоттеры и другие устройства судна с обновлением данных через 25 мс. По высокоточным данным системы GPSи дифференциальных подсистем спутниковый компас обеспечивает выдачу скорости судна относительно дна(SOG), курса относительно дна (COG), скорости поворота (ROT), координат (широта и долгота). Время перехода в готовность после включения компаса составляет не более 3…4 минут, что является существенным преимуществом перед традиционными гирокомпасами. Преимущество же традиционных компасов перед спутниковыми заключается в их автономности
Вопросы для самоконтроля по главе 8: 1.Координаты какой точки на судне вычисляет приемник СНС? 2.Какие параметры определяет приемник СНС для решения навигационных задач? 3.В чем отличие спутниковых навигационных систем от систем радиосвязи? 4.В чем заключается принципиальное отличие морских СНС навигаторов от СНС навигаторов иного назначения? 5.Какие задачи навигации выполняют современные СНС навигаторы с совмещенными функциями картплоттера? 6.Какие конструктивные требования предъявляются к антенному блоку судового СНС навигатора? Какие требования предъявляются к его размещению и установке на судне? 7.Каким требованиям должен удовлетворять интерфейс судового СНС навигатора? 8.Почему официальный формат векторных карт S -57 v .3 конвертируется в закрытый, внутренний формат SENC ?. 9. Дать определение маршрута, формируемого СНС навигатором с функциями картплоттера. 10.Какие виды сигнализации предусматриваются в морских СНС навигаторах? 11.Какова емкость путевых журналов морских СНС навигаторов? 12. Охарактеризуйте режимы навигации GO TO , TRAC BACK , ROUTE . 13. Какие конечные вычисления выполняет путевой компьютер морского СНС навигатора? 14.Из каких функциональных составляющих состоит приемный модуль СНС навигатора? 15.Перечислите технические характеристики антенного блока СНС навигатора. За счет чего обеспечивается компенсация потерь в коаксиальном кабеле? 16.Почему выделенные антенной радиосигналы переводят в диапазон промежуточных частот? 17.Какие функции в приемном модуле СНС навигатора выполняет блок корреляции? 18.Что формирует интерфейс потребителя спутниковой навигационной системы? 19. Перечислите возможности и основные преимущества спутникового компаса перед традиционным гирокомпасом. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 226; Нарушение авторского права страницы