
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система отчёта, перемещение . Скорость.Средняя и мгновенная скорости. Путь. Средняя путевая скорость. Ускорение.Стр 1 из 6Следующая ⇒
Система отчёта, перемещение . Скорость.Средняя и мгновенная скорости. Путь. Средняя путевая скорость. Ускорение. Система отчёта Положение тела в пространстве может быть определенно только по отношению к каким-либо другим телам. Это относится к движению тела, к изменению его положения с терчением времени. Тело , которое служит для определения положения интересующего нас тела, называют телом отсчёта. Совокупность тела отсчёта и связанных с ним кординат и синхронизированних между соббой часов образует систему отсчёта. Описание движения при помощи расстояний и промежутков времени возможно только тогда, когда выбрана определенная система отсчёта. Вектор перемещения ∆r представляет собой приращение радиуса вектора Скорость.Средняя и мгновенная скорости Отношение Вектор <v> совпадает по направлению с ∆ Мгновеная скорость : V = Определим вектор скорости Вектор скорости в данный момент ( мгновенная скорость) равен производной от радиуса-вектора r по времени и направлен по касательной к троектории в данной точке в сторону движения точки. 1.4 Путь - это длинна участка траектории, пройденного материальной точкой. 1.5 Средняя путевая скорость : <v> = Это средняя скорость по перемещению, которая будет вектором, равным отношению перемещении к времени, за которое он совершено. Cреднюю путевую скорость определяют таким образом, может равняться 0 даже тело движилось . Ускорение Ускорение : движение точки характеризуется также ускорением. Вектор ускорения определяет скорость изменеия вектора скорости со времением : То есть ускорение равно производной от вектора скорости по времени. Направление вектора а совпадает с направлением вектора 2.Закон движения и Уравнение троектории : 2.1 Закон движения : Запишем проекции на Оx, Oy, Oz радиуса-вектора r(t) характеризующего положения интересующей нас точки относительно тачала координат О в момент t: x = x(t) , y = y(t) , z = z(t) и получается r = r(t) = x(t).i + y(t).j + z(t).k Зная зависимость этих координат от времени – закон движения точки, можно найти положения точки в каждый момент, её скорость и ускорение. 2.2 Уравнение траектории: это зависимость (математическая формула) некоторой кординаты от другой, без времени. Оно показывает как движется тело и какую траекторию совершило движения. Y=f(x) 3. Cпособы задания движения. Проекции ускорения в прямоугольной и естественной системе координат. 3.1 векторный способ В этом способе положение интересующей нас точки А задают радиусом – вектором r , проведенным из некоторой неподвижной точки О выбранной системы отсчёта в точку . При движении точка и её радиус-вектор меняются в обюем случае как по модулю, так и по направлению, то есть радиус-вектор r зависит от времени t. Геометрическое место концов радиуса-вектора r называют траекторией. Естественный способ Этот способ принимают тогда, когда троектория точки известна заранее. Положение точки А определяют дуговой кординатной l – расстоянием в доль траектории от выбранного начала отсчёта О.
Ускорение
aт - тангенциальное ускорение , аn – нормальное ускорение то есть ускорение в естестсвенной системе 4. Принцип относительности Галилея. Преобразования Галилея. Принцип относительности Галилея для инерциальных согладно что, все инерциальные системы по своим механическим свойствам эквивалентны друг другу. Это значит во всех инерциальных системах отсчёта свойства времени и пространства одинаковы, одинаковы а также законы механики. Преобразавания Галилея при переходе от одной инерциальной системы отсчета к другой. Пусть инерциальная система К’ движется со скоростью V относительно другой инерциальной системы K.
Первый закон Ньютона Существуют такие системы, называемые инерциальными, относительно которых метериальная точка при отсутствии внешних воздействий сохраняет величину и направление скорости неограниченно долго. Масса : ª Всякое тело « отказывает » сопротивление при любых попытах изменить его скорость – как по модулю, так и по направлению. Это свойство, называют инертностью. ª Мерой инертности служит величина, называемая массой. Свойства: Масса – величина аддитивная, то есть масса составного тела равна сумме масс его частей. Масса – величина постояная, то есть не изменяется при его движении.
6.2 Второй закон Ньютона : Произвидение массы материальной точки на её ускорение равно действующей на неё силе : ma = F Уравнение движения материальной точки. Однако, у нас есть : m ↔ 6.3 импульс тела : это количество движения
Силы в природе Æ Сила – это векторная величина , харатеризующая интенсивностью взаймодействия тел.
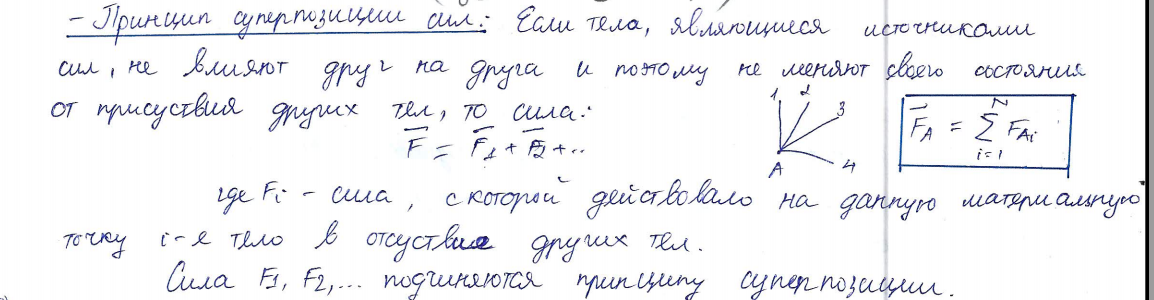
Принцип суперпозиции сил « На всякую материальную точки в данных конкретных условиях действует, строго говоря, всего только одна сили F» . Классификация сил
Сила тяжести
8.2 Вес ª сила воздействия тела на опору, препятствующую падению, возникающая в поле сил тяжести. ª Вес P тела, покоящегося в инерциальной системе отсчёта Упругие силы. При деформации тела возникает сила, противодействующая этой деформации. Эта сила называется силой упругости. Простейшим видом деформации являются деформации растяжения и сжатия. Силы трения Æ Сила трения покоя - возникающая между двумя контактирующими телами и препятствующая возникновению относительного движения. Максимальная сила трения покоя в простейшем приближении: Æ Сила трения скольжения Æ Сила трения катения
Æ Сила сопротивление : F = -kv , в газе или в жидкости 1. Сила гравитационного притяжения, действующая между двумя материальными точками. F = Где 2. Кулоновская сила, действующая между 2 точечными зарядами : F = k. 3. Однородная сила тяжести : F = mg 4. Упругая сила : F = -kr , r-смещение 5. Сила трения скольжения, возникающая при скольжении вонного тела по поверхности другого тела: F = -k Rn k- констант треня скольжения , Rn – сила нормального давления 6. Сила сопротивление : F = -kv , в газе или в жидкости Сили гравитационного притяжения, действующая между двумя материальными точками. F = Третий закон Ньютона : Силы, с которыми две материальные точки действуют друг на друга, всегда равны по модулю и направлены в протовополодные стороны вдоль прямой, соединяющей эти точки : F12 = - F21 . Пределы: Три типа симуаций, в которых классическая механика не выполняется. 1. При очень маленьких размерах или массах. - квантовая механика 2. При скоростях, близких к скорости света. - специальная теория относительности 3. При рассмотреним системы с очень большим числом чатиц. ( или же большим числом стененей свободы ). - статистическая физика. Полный механический импульс Уравнение движения материальной точки. Однако, у нас есть : m Импульс системы – это векторная сумма импульсов всех отдельных частиц системы.
Центр инерции В любой система частиц имеется одна замечательная точка называемая центром масс. Её положение относительно начала О данной системы характеризуется радиусом-вектором.
mi , ri масса и радиус i-й частицы , m масса всей системы Работа переменной силы A = + Работа упругой силы F = -æ.r , r – радиус-вектор частиц M относительно точки О δА = F.dr = -æ.r.dr A = - +Работа гравитационноий силы F = δA = F.dr = A = + Работа однородной силы тяжести F = -mgk , k – орт вертикальной оси z δA = F.dr = -mgk.dr → A = mg (z1 – z2) 16.3 Мощность : Для характеристики скорости, с которой совершается работа вводят величину, называемую мощностью. N =
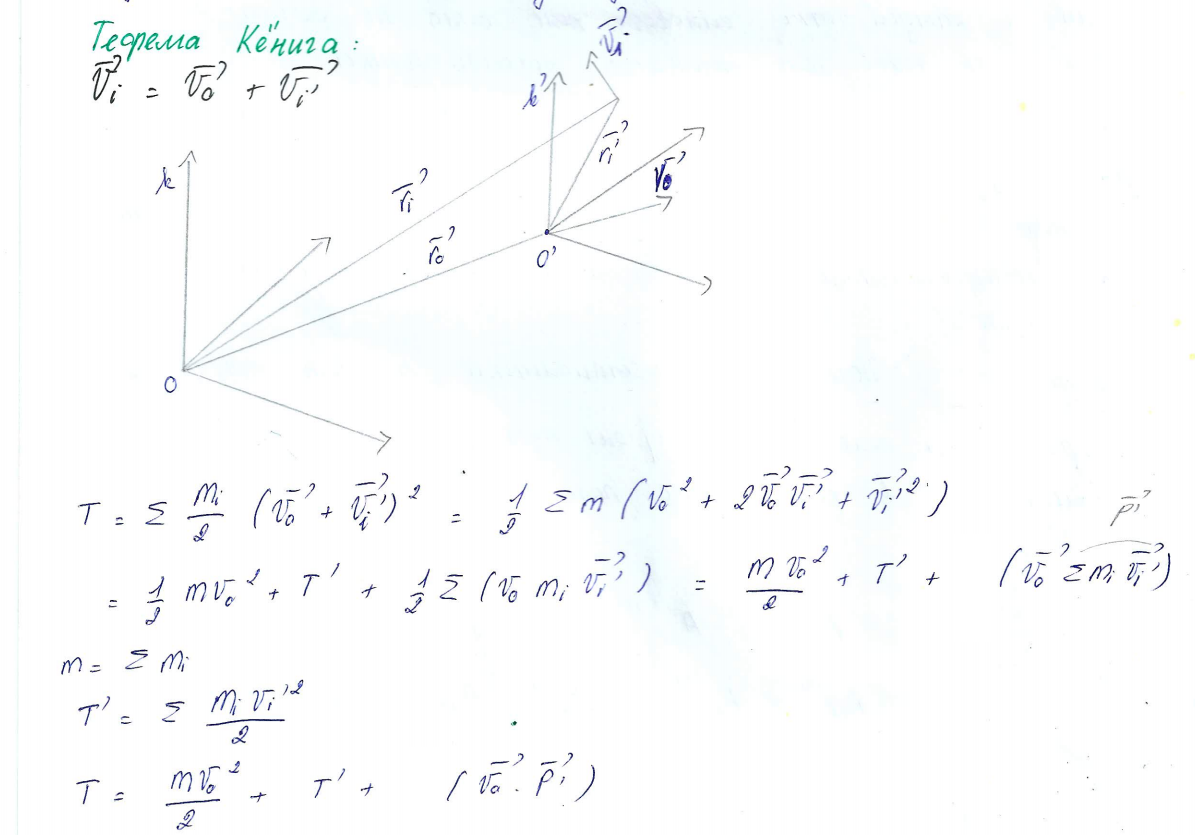
Энергия Энерния является мерой способности физической системы совершить работу. эту величину – сумму кинетической и потенциальной энергий – называют полной механической энергией частицы в поле и обозначают E. E = K + U K – потенциальная энергия U – кинетическая энергия Теорема Кёнига :
Ц – система Ц – система обладает особеностью, что полный импульс системы частиц в ней всегда = 0
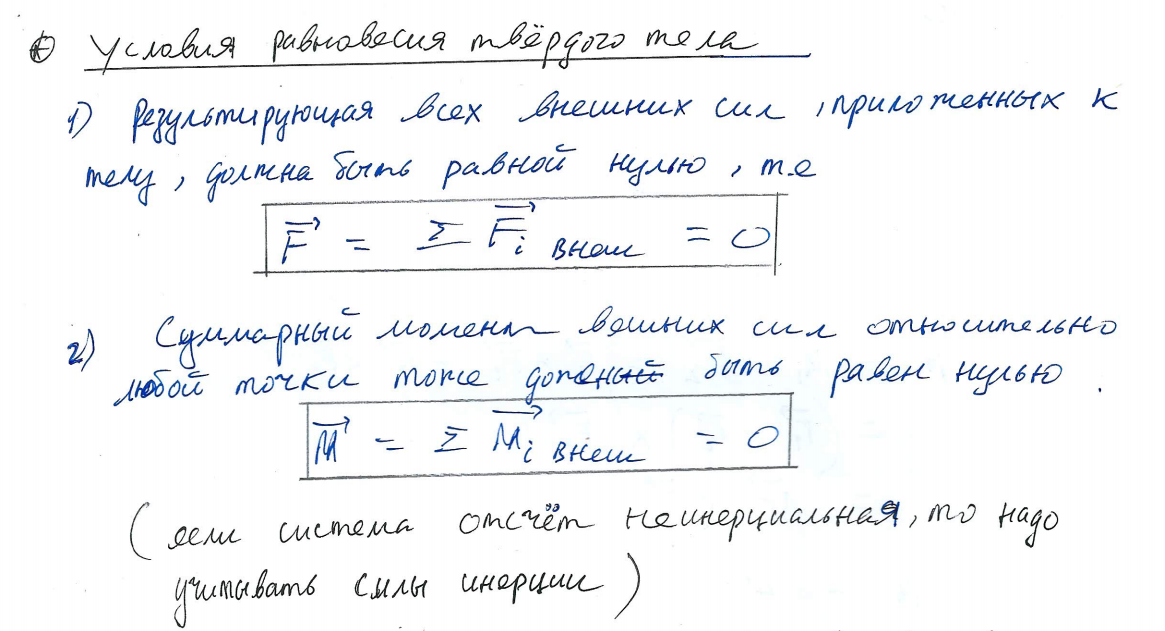
Потенциальное поле сил : Полем сил называтеся область пространства, в каждой точке которого сила, которая действует на помещенную туда частицу, меняется законмерно от точки к точке. Если в кажой точке силового поля сила не зависит от времени, то такое поле называется стационарным . Стациональное силовое поле, в котором работа силы поле на пути между 2-мя любыми точками не зависит от формы пути, а зависит только от положения этих точек, называется потенциальным полем. И сами эти силы называются консервативными. Внутреняя энергия Внутреняя энергия системы - это сумма всех кинетической энергии всех частиц, из которорых состоит ситема, и потециальной энергии их взаймодействия между частями. Равновесные состояния Это состояние , в котором тело находится в покое или движется равномерно прямолинейно или вращается без касательного ускорения. Виды равновесия: Æ Неустойчивое : Если система будет смещена на небольшое расстояние, то она продолжит своё движение за счёт сил, действующих на систему. Æ Устойчивое равновесие : Если систему сместить на небольшое расстояние, она вернётся назад в состояние равновесия. Æ Безразличное равновесие : Если система будет смещена на небольшое расстояние, она останется в новом положении. 21.2 Условия : Механическое равновесие - состояние механической системы, при котором сумма всех сил, действующих на каждую её частицу, равна нулю и сумма моментов всех сил, приложенных к телу относительно любой оси вращения равна нулю.
Пара силы Две равные паралельные силы F1 и F2 , направленных в противоположные стороны, такие силы образуют пару сил.
Момент импульса системы
Система отчёта, перемещение . Скорость.Средняя и мгновенная скорости. Путь. Средняя путевая скорость. Ускорение. Система отчёта Положение тела в пространстве может быть определенно только по отношению к каким-либо другим телам. Это относится к движению тела, к изменению его положения с терчением времени. Тело , которое служит для определения положения интересующего нас тела, называют телом отсчёта. |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 276; Нарушение авторского права страницы
 1.2 перемещение
1.2 перемещение за время ∆t , т.е вектор, проведенный изначального положения в конечное.
за время ∆t , т.е вектор, проведенный изначального положения в конечное. называют средним вектором скорости за время ∆t.
называют средним вектором скорости за время ∆t. > =
> =  .
. =
= 
 точки в данный момент как придел отношения
точки в данный момент как придел отношения  при ∆t à0 :
при ∆t à0 :
 =
= 
 .
. Введем единичний вектор т , связанный с движущейся А и направленный по касательной к троекторий в сторону возрастания дуговой кординаты l. То получим:
Введем единичний вектор т , связанный с движущейся А и направленный по касательной к троекторий в сторону возрастания дуговой кординаты l. То получим: = vт
= vт  =
= 
 =
=  =
=  =
=  .
.  .
.  =
=  .
.  .
.  =
=  .
.  = aт + аn
= aт + аn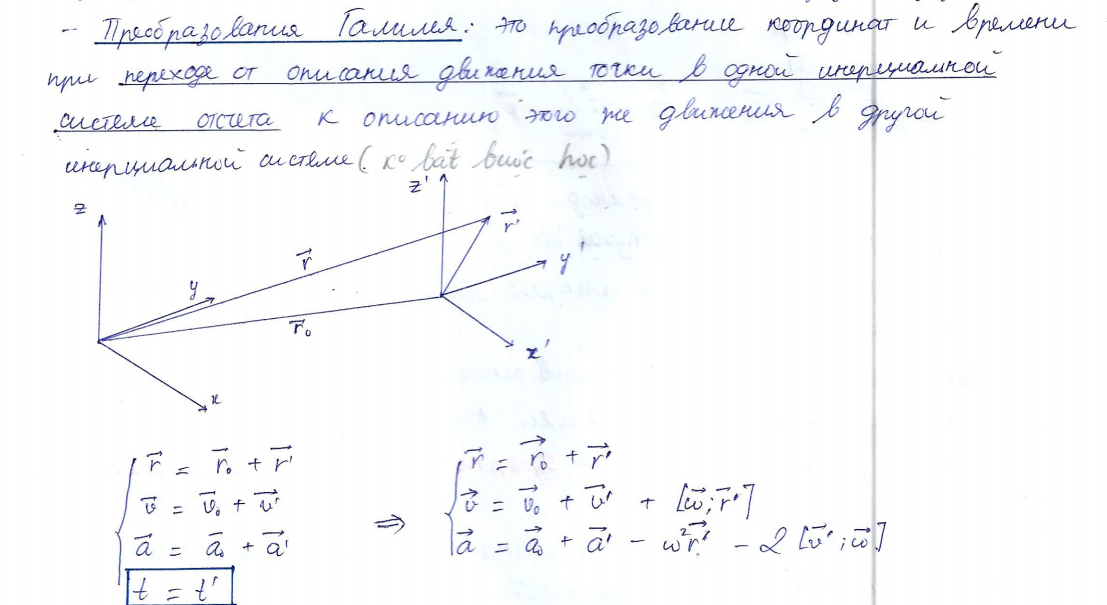
 = F ↔
= F ↔  = F ( масса постояная)
= F ( масса постояная) = F (
= F (  = m.
= m.  )
)



 , совпадает с силой тяжести, действующей на тело.
, совпадает с силой тяжести, действующей на тело. 

 , где k0 —коэффициент трения покоя, N — сила нормальной реакции опоры.
, где k0 —коэффициент трения покоя, N — сила нормальной реакции опоры.

 .
. 

 = F ↔
= F ↔  = F ( масса постояная) ↔
= F ( масса постояная) ↔  = F (
= F (  = m.
= m.  =
= 
 =
= 


 =
=  или
или 
 =
=  -
- 
 . lr , lr – орт радиус-вектора r
. lr , lr – орт радиус-вектора r =
=  -
- 
 = F.v (ватт - Вт)
= F.v (ватт - Вт) 



 =
=  - Момент импульса L равен сумме моментов импульсов частей Li
- Момент импульса L равен сумме моментов импульсов частей Li