|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Передаточная функция двигателя по обмотке возбуждения.Стр 1 из 10Следующая ⇒
Передаточная функция двигателя по обмотке возбуждения. 2) Преобразователь координат α-β в x-y
Cкалярное управление АД Скалярное управление или U/f-регулирование асинхронным двигателем – это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора. При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются. К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д. Вентильный двигатель Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
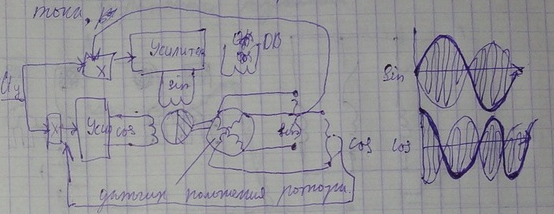
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором). Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора. Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные. Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов. Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
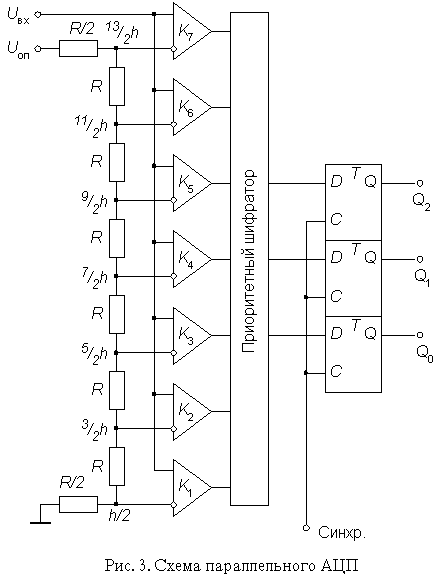
АЦП параллельного типа Параллельные АЦП прямого преобразования,[6] полностью параллельные АЦП, содержат по одному компаратору на каждый дискретный уровень входного сигнала. В любой момент времени только компараторы, соответствующие уровням ниже уровня входного сигнала, выдают на своём выходе сигнал превышения. Сигналы со всех компараторов поступают либо прямо в параллельный регистр, тогда обработка кода осуществляется программно, либо на аппаратный логический шифратор, аппаратно генерирующий нужный цифровой код в зависимости от кода на входе шифратора. Данные с шифратора фиксируются в параллельном регистре. Частота дискретизации параллельных АЦП, в общем случае, зависит от аппаратных характеристик аналоговых и логических элементов, а также от требуемой частоты выборки значений. Параллельные АЦП прямого преобразования - самые быстрые, но обычно имеют разрешение не более 8 бит, так как влекут за собой большие аппаратные затраты (2n − 1 = 28 − 1 = 255 компараторов). АЦП этого типа имеют очень большой размер кристалла микросхемы, высокую входную ёмкость, и могут выдавать кратковременные ошибки на выходе. Часто используются для видео или других высокочастотных сигналов, а также широко применяются в промышленности для отслеживания быстро изменяющихся процессов в реальном времени.
Двухфазный АД Рис. 1. Двухфазные асинхронные двигатели: а — с короткозиминутым ротором; б — с полым ротором Вращающиеся магнитные поля могут быть созданы и двухфазными обмотками, если обе фазы этих обмоток пространственно смещены на 90° друг относительно друга. Если фазы обмотки питать двумя токами, смещенными на 90° по фазе, то получается, как и в трехфазном электродвигателе, вращающееся магнитное поле. В двухфазном электродвигателе создается вращающий момент, обусловленный токами, вызванными вращающимся магнитным полем в стержнях ротора электродвигателя. Ротор получает ускорение до тех пор, пока он — как и в трехфазном асинхронном двигателе — не достигнет определенной конечной частоты вращения, которая ниже частоты вращения поля. Если обе фазы обмотки ротора питать от одной и той же сети однофазного тока, то сдвиг фаз в одной из обмоток, необходимый для получения вращающегося поля, может быть реализован путем подключения конденсатора с достаточной емкостью. На рис.1, а показана схема двухфазного асинхронного двигателя с конденсатором при питании от сети переменного тока.
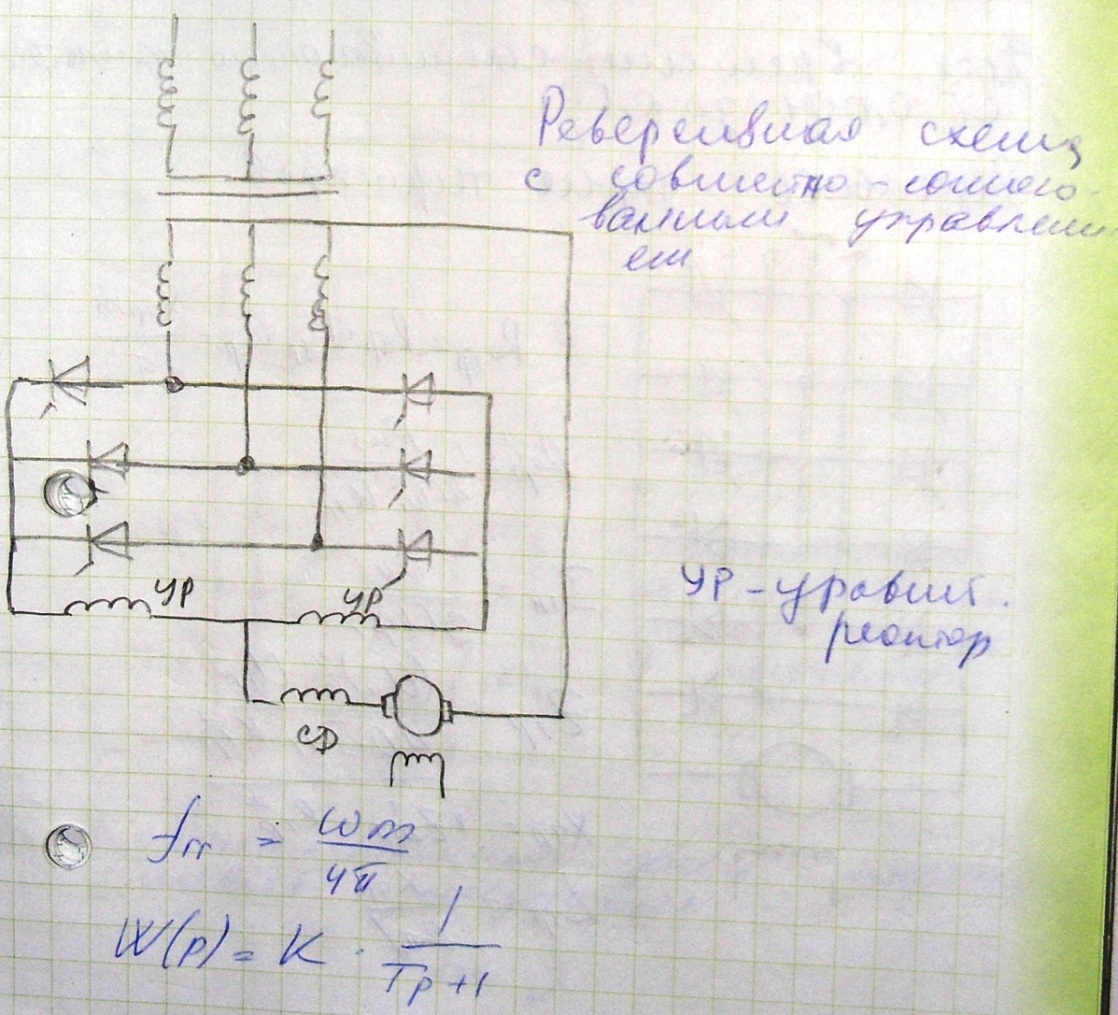
В настоящее время расширилась сфера применения двуфазного асинхронного двигателя в виде электродвигателя с полым ротором. В таком электродвигателе вместо обычного короткозэмкнутого ротора применяется алюминиевый цилиндр, который может вращаться в воздушном зазоре между внешним и внутренним статорами (рис.1б). Вращающееся поле вызывает в алюминиевом цилиндре вихревые токи, которые, взаимодействуя с магнитным полем в воздушном зазоре, создают вращающий момент. Цилиндр достигает конечной асинхронной частоты вращения, которая соответствует нагрузке на валу. Небольшой момент инерции ротора электродвигателя обусловливает благоприятные рабочие характеристики. Электродвигатели с полым ротором рассчитаны прежде всего на небольшие мощности и применяются для автоматического регулирования в компенсационных и мостовых схемах. Одна из обмоток вместе с конденсатором подключается к сети с напряжением, а на вторую обмотку подается управляющее напряжение. Датчики тензосопротивления. Датчик нагрузки – это, своего рода, конвертер, который преобразовывает обычную механическую силу в некие показания. Несмотря на то, что существует много разновидностей датчиков нагрузки, на данный момент в сфере промышленного взвешивания самую широкую распространенность получили тензометрические датчики, или просто, тензодатчики. Важной особенностью электрических тензо-датчиков является возможность их применения для динамических измерений с непрерывной записью показаний на осциллографы. Эта возможность, вместе с возможностью многоточечного тензометрирования, оправдывает необходимость использования довольно сложной электрической и электронной аппаратуры. Работа тензодатчиков основана на использовании свойств материала изменять электрическое сопротивление при деформации под действием внешней силы. Тензо-датчики делают из проволоки, фольги или ленты. 20) Передаточная функция ДПТ при действии Мнагр. Инструментальные усилители. Инструментальные усилители (ИУ) – это прецизионные усилительные блоки, которые имеют дифференциальный вход, а их выход может быть дифференциальным или несимметричным по отношению к опорному напряжению. Эти усилители обеспечивают усиление разности между напряжениями двух входных сигналов, ослабляя любые сигналы, которые являются общими для обоих входов. ИУ широко применяются во многих задачах сбора данных, промышленных, измерительных и медицинских приложениях, где требуется поддержание высокой точности статических характеристик и малой погрешности коэффициента усиления на фоне шумов и в присутствии сильных синфазных сигналов (обычно, на частоте напряжения питания сети переменного тока). Датчики проводимости. Основными характеристиками ТП являются дискретность работы и полууправляемость. Бывают схемы с совместно-согласованным и раздельным управлением.
Постоянная времени сглаживающего фильтра от 0,004 до 0,1. Раздельное управление тиристоров:
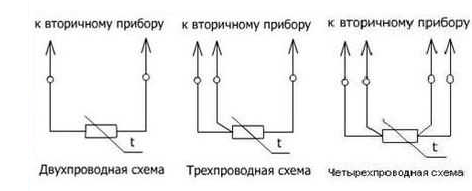
Датчики термосопротивления. Конструктивно датчики термосопротивления представляют собой катушку, намотанную очень тонкой (0,05 или 0,063) медной или платиновой проволокой. Катушка помещается внутрь завальцованной с одной стороны металлической гильзы с герметизирующей засыпкой или заливкой, имеющей электрическое сопротивление более 10 МОм. Выводы катушки соединены с клеммами, расположенными в головке датчика. Совокупность катушки, гильзы и клемм называется чувствительным элементом. Все остальное – корпусом или головкой датчика. По сути дела, датчик термосопротивления является переменным резистором, сопротивление которого меняется по определенному закону в зависимости от температуры среды. Закон изменения сопротивления зависит от градуировки датчика. С эксплуатационной точки зрения можно считать, что закон изменения сопротивления является линейной функцией. Подключение датчиков термосопротивления производиться по двух, трех или четырех проводной схеме. Двухпроводная схема подключения используется крайне редко, так как в этом случае сопротивление соединительных проводов вносит существенную погрешность в измерение. Наиболее часто используется трехпроводная схема подключения
Погрешность измерения температуры ΔТ при применении двухпроводной линии связи датчика термосопротивления с вторичным прибором может быть рассчитана по следующей формуле.
Увеличение длины линии связи L приводит к возрастания погрешности, применение провода с большим сечение жилы S приводит к уменьшению погрешности. Удельное сопротивление меди ρ равно 0,0171 Ом*мм2/м. Через множитель 2 учитывается суммарное сопротивление обоих (двух) жил кабеля.
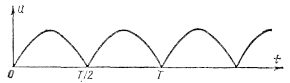
Коэффициент К зависит от градуировки применяемого датчика термосопротивления. Коэффициенты К, приведенные в таблице, были рассчитаны для W100=1,391 (платиновые датчики) и W100=1,428 (медные датчики). ГПТ. Генератор постоянного тока преобразует механическую энергию в электрическую. В зависимости от способов соединения обмоток возбуждения с якорем генераторы подразделяются на: 1. генераторы независимого возбуждения; 2. генераторы с самовозбуждением; · генераторы параллельного возбуждения; · генераторы последовательного возбуждения; · генераторы смешанного возбуждения; Генераторы малой мощности иногда выполняются с постоянными магнитами. Свойства таких генераторов близки к свойствам генераторов с независимым возбуждением. Генераторы постоянного тока представляют собой обычные индукционные генераторы, снабженные особым приспособлением — так называемым коллектором,— дающим возможность превратить переменное напряжение на зажимах (щетках) машины в постоянное. График напряжения на зажимах такого генератора, якорь которого имеет одну рамку, а коллектор состоит из двух полуколец, изображен на рис. 330. Как видим, в этом случае напряжение на зажимах генератора, хотя и является прямым, т. е. не меняет своего направления, но все время Магнитный усилитель. Магнитный усилитель — это статический аппарат, предназначенный для управления величиной переменного тока посредством слабого постоянного тока. Применяется в схемах автоматического регулирования электродвигателей переменного тока. Принцип действия Работа магнитного усилителя основана на нелинейности характеристики намагничивания магнитопровода. На крайних стержнях магнитного усилителя находится рабочая обмотка, которая состоит из двух катушек, соединённых последовательно. На среднем стержне размещается обмотка управления из большого количества витков W=. Если ток в неё не подаётся, а к рабочей обмотке, соединённой последовательно с нагрузкой, подведено переменное напряжение U~, то из за малого количества витков W~ магнитопровод не насыщается, и почти всё напряжение падает на реактивном сопротивлении рабочих обмоток Z~. На нагрузке в этом случае выделяется малая мощность. Если теперь пропустить по обмотке управления ток Iу, то даже при небольшом его значении (из-за большого W=), возникает насыщение магнитопровода. В результате реактивное сопротивление рабочей обмотки резко уменьшается, а величина тока в цепи — увеличивается. Таким образом, посредством малых сигналов в обмотке управления можно управлять значительной величиной мощности в рабочей цепи магнитного усилителя. Другими словами магнитный усилитель — это управляемая постоянным током индуктивность, которая включается в цепь переменного тока последовательно с нагрузкой. При большой индуктивности ток в последовательной цепи и в нагрузке маленький, при малой индуктивности ток в последовательной цепи и в нагрузке большой. В последнее время магнитный усилитель был частично потеснён полупроводниковыми приборами, но в ряде применений по-прежнему не имеет конкурентов.
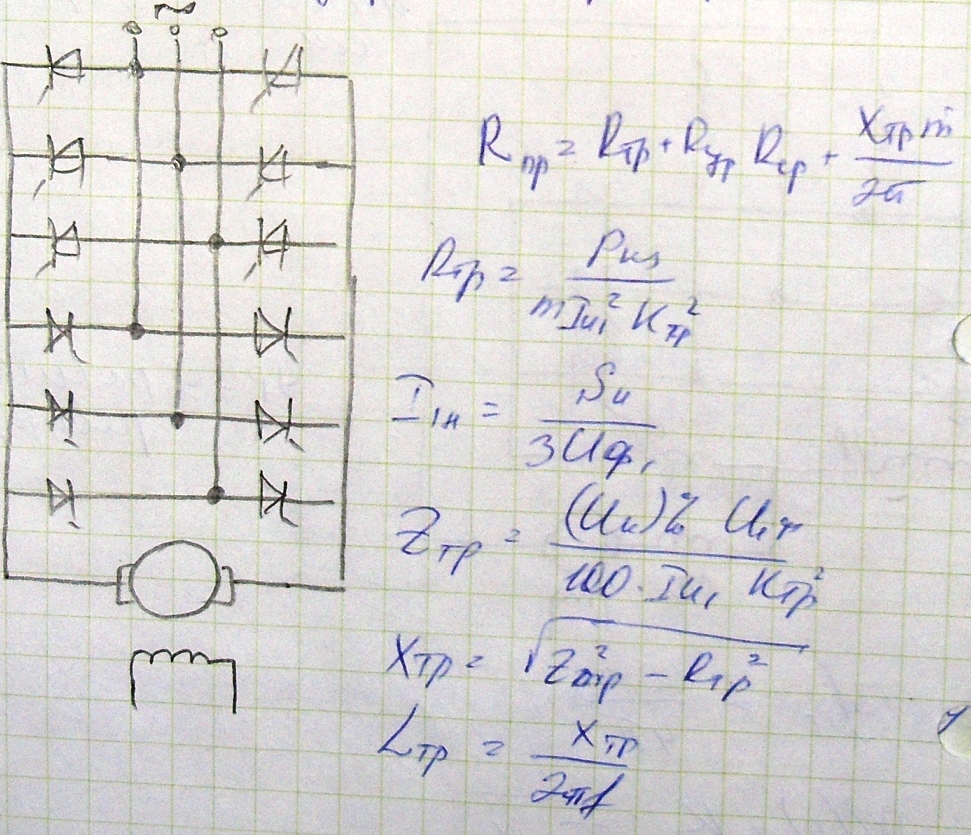
Рис. 83. Однофазный дроссель насыщения на Ш-образном сердечнике Непосредственный ПЧ. Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты. Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и нижечастоты питающей сети. Схема любого преобразователя частоты состоит изсиловойи управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита). Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса: 1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока. 2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока). Каждый из существующих классов преобразователей имеет свои достоинства инедостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом. Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся: - практически самый высокий КПД относительно других преобразователей (98,5% и выше), - способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, - относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования. Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются. ЭМУ с поперечным полем. Электромашинные усилители (ЭМУ) применяют в схемах автоматики для усиления управляющих сигналов, получаемых от различных датчиков, сельсинов, поворотных трансформаторов и других устройств. Электромашинные усилители представляют собой специальные электрические генераторы постоянного или переменного тока, выходная мощность которых может изменяться в широких пределах путем изменения мощности управления. Отношение выходной мощности к мощности управления называют коэффициентом усиления по мощности. Современные ЭМУ имеют весьма большие коэффициенты усиления, необходимые для усиления сравнительно слабых управляющих сигналов. В системах автоматического регулирования электромашинные усилители применяются в качестве усилителей мощности и работают в основном при переходных режимах, в процессе которых возникают значительные перегрузки по току. Поэтому одним из требований к электромашинному усилителю является хорошая перегрузочная способность. К числу важнейших требований, предъявляемых к электромашинному усилителю, относятся надежность в работе и стабильность характеристик. Электромашинные усилители, используемые на самолетах и транспортных установках, должны обладать минимальными габаритами и весом. В промышленности наибольшее распространение получили независимый электромашинный усилитель, электромашинный усилитель с самовозбуждением и электромашинный усилитель поперечного поля с диаметральным шагом. Коэффициент усиления по мощности независимого ЭМУ не превышает 100. С целью повышения коэффициента усиления по мощности ЭМУ были созданы электромашинные усилители с самовозбуждением. Конструктивно ЭМУ с самовозбуждением (ЭМУС) отличается от независимого ЭМУ только тем, что на его полюсах возбуждения соосно с обмотками управления размещается обмотка самовозбуждения, включаемая параллельно обмотке якоря или последовательно с ней. Τаκие усилители применяются главным образом для питания обмотки возбуждения генератора в системе генератор—двигатель и в этом случае длительность переходного процесса определяется постоянной времени генератора. В отличие от независимого ЭМУ и ЭМУ с самовозбуждением (ЭМУС), в которых основным потоком возбуждения является продольный магнитный поток, направленный вдоль полюсов возбуждения, в ЭМУ поперечного поля основным потоком возбуждения является поперечный поток реакции якоря. Важнейшей статической характеристикой ЭМУ поперечного поля является коэффициент усиления по мощности. Высокий коэффициент усиления по мощности получается за счет того, что ЭМУ поперечного поля является двухступенчатым усилителем. Первая ступень усиления: обмотка управления — короткозамкнутая цепь поперечных щеток. Вторая ступень: короткозамкнутая цепь поперечных щеток — выходная цепь продольных щеток. Поэтому общий коэффициент усиления по мощности kp = kp1kp2, где kp1—коэффициент усиления 1-й ступени; kp2— коэффициент усиления 2-й ступени. При использовании электромашинных усилителей в замкнутых системах автоматического регулирования (стабилизаторы, регуляторы, следящие системы) машина должна быть несколько недокомпенсирована (к=0,97÷0,99), так как в случае перекомпенсации в системе во время работы возникнет ложное возмущение за счет остатка м. д. с. компенсационной обмотки, которое приведет к возникновению автоколебаний системы. Общий коэффициент усиления по мощности ЭМУ поперечного поля пропорционален четвертой степени скорости вращения якоря, магнитным проводимостям по поперечной и продольной осям и зависит от соотношения сопротивлений обмоток машины и нагрузки. Отсюда следует, что усилитель будет иметь тем больший коэффициент усиления по мощности, чем меньше будет насыщена его магнитная цепь и чем выше будет скорость его вращения. Чрезмерно увеличивать скорость вращения нельзя, так как начинает сильно возрастать действие коммутационных токов. Поэтому при чрезмерном увеличении скорости за счет повышения коммутационных токов коэффициент усиления по мощности расти не будет, а может даже снижаться. Аналоговый компаратор. Компаратор - это сравнивающее устройство. Аналоговый компаратор предназначен для сравнения непрерывно изменяющихся сигналов. Входные аналоговые сигналы компаратора суть Uвх - анализируемый сигнал и Uоп - опорный сигнал сравнения, а выходной Uвых - дискретный или логический сигнал, содержащий 1 бит информации:
Выходной сигнал компаратора почти всегда действует на входы логических цепей и потому согласуется по уровню и мощности с их входами. Таким образом, компаратор - это элемент перехода от аналоговых к цифровым сигналам, поэтому его иногда называют однобитным аналого-цифровым преобразователем. Неопределенность состояния выхода компаратора при нулевой разности входных сигналов нет необходимости уточнять, так как реальный компаратор всегда имеет либо конечный коэффициент усиления, либо петлю гистерезиса (рис. 1).
Рис. 1. Характеристики компараторов
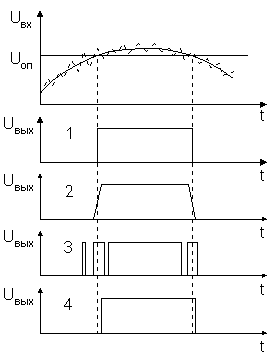
Рис. 2. Процессы переключения компараторов Чтобы выходной сигнал компаратора изменился на конечную величину |U1вых - U0вых| при бесконечно малом изменении входного сигнала, компаратор должен иметь бесконечно большой коэффициент усиления (эпюра 1 на рис. 2) при полном отсутствии шумов во входном сигнале. Такую характеристику можно имитировать двумя способами - или просто использовать усилитель с очень большим коэффициентом усиления, или ввести положительную обратную связь. Рассмотрим первый путь. Как бы велико усиление не было, при Uвх близком к нулю характеристика будет иметь вид рис. 1а. Это приведет к двум неприятным последствиям. Прежде всего, при очень медленном изменении Uвх выходной сигнал также будет изменяться замедленно, что плохо отразится на работе последующих логических схем (эпюра 2 на рис. 2). Еще хуже то, что при таком медленном изменении Uвх около нуля выход компаратора может многократно с большой частотой менять свое состояние под действием помех (так называемый "дребезг", эпюра 3). Это приведет к ложным срабатываниям в логических элементах и к огромным динамическим потерям в силовых ключах. Для устранения этого явления обычно вводят положительную обратную связь, которая обеспечивает переходной характеристике компаратора гистерезис (рис. 1б). Наличие гистерезиса хотя и вызывает некоторую задержку в переключении компаратора (эпюра 4 на рис. 2), но существенно уменьшает или даже устраняет дребезг Uвых.
Рис. 3. Схема компаратора на ОУ Пусть R1 = R2. Если Uвх - Uоп > 0, то диод VD2 открыт и выходное напряжение схемы небольшое отрицательное, равное падению напряжения на открытом диоде. При Uвх - Uоп < 0 на стабилитроне установится напряжение, равное его напряжению стабилизации Uст. Это напряжение должно соответствовать единичному логическому уровню цифровых интегральных микросхем (ИМС), входы которых подключены к выходу компаратора. Таким образом, выход ОУ принимает два состояния, причем в обоих усилитель работает в линейном режиме. Многие типы ОУ не допускают сколько-нибудь существенное входное дифференциальное напряжение. Включение по схеме на рис. 3 обеспечивает работу ОУ в режиме компаратора практически с нулевыми дифференциальными и синфазными входными напряжениями. Недостатком данной схемы является относительно низкое быстродействие, обусловленное необходимостью частотной коррекции, так как ОУ работает в линейном режиме со 100%-ной обратной связью. Используя для построения компаратора обычные ОУ, трудно получить время переключения менее 1 мкс. Сторожевой таймер. Сторожевой таймер (контрольный таймер, англ. Watchdog timer) — аппаратно реализованная схема контроля за зависанием системы. Представляет собой таймер, который периодически сбрасывается контролируемой системой. Если сброса не произошло в течение некоторого интервала времени, происходит принудительная перезагрузка системы. В некоторых случаях сторожевой таймер может посылать системе сигнал на перезагрузку («мягкая» перезагрузка), в других же — перезагрузка происходит аппаратно (замыканием сигнального провода RST или подобного ему). Физически сторожевой таймер может быть:
Автоматизированные системы, не использующие оператора человека, хотя тоже подвержены ошибкам, зависаниям и другим сбоям (в т.ч. аппаратным), с использованием сторожевых таймеров увеличивают стабильность работы — нет необходимости ручного сброса. Поэтому наиболее частое использование их — встроенные системы различного назначения. Область применения Блок прерываний. Блок прерываний принимает запросы прерываний и организует переход к выполнению прерывающей программы. Запрос принимается либо от внешних источников либо от внутренних (т/с, компараторы). Входами внешних сигналов являются входы параллельные вх-вых, для которых эти функции являются альтернативными.
Команды ветвления. Команда ветвления - это составная команда алгоритма, в которой в зависимости от условия Р выполняется или одно S1, или другое S2 действие. Из команд следования и команд ветвления составляются разветвляющиеся алгоритмы (алгоритмы ветвления). Примером разветвляющегося алгоритма будет нахождение большего из двух чисел, введенных с клавиатуры.
· Алгоритм ветвления это такой алгоритм, в котором выбирается один из нескольких вариантов (путей). · Признаками алгоритма ветвления являются: 1. В алгоритме, записанном словами, есть оператор условия, который записывается в форме – Если …, то …., иначе ……
2. В алгоритме ветвления, записанном в виде блок – схемы есть логический блок, который имеет форму ромба. Датчики тока. Датчики тока предназначены для измерения постоянного, переменного и импульсного токов без разрыва цепи. Выпускаются универсальные датчики и датчики, предназначенные для измерения только в цепях переменного тока промышленной частоты (50 Гц). Широкий ассортимент выпускаемых моделей приборов позволяет измерять токи от нескольких миллиампер до десятков килоампер. Конструкция датчиков тока включает в себя магнитопровод с зазором и компенсационной обмоткой, датчик Холла и электронную плату обработки сигналов. Магниточувствительный датчик Холла закреплен в зазоре магнитопровода и соединен с входом электронного усилителя. При протекании измеряемого тока по шине, охватываемой магнитопроводом, в последнем наводится магнитная индукция. Датчик Холла, реагирующий на возникшее магнитное поле, вырабатывает напряжение, пропорциональное величине наведенной магнитной индукции. Выходной сигнал с датчика усиливается электронным усилителем и подается в компенсационную обмотку. В результате, по обмотке течет компенсационный ток, пропорциональный измеряемому току по величине и соответствующий ему по форме. Возникающее при этом магнитное поле компенсационной обмотки компенсирует магнитное поле измеряемого тока, и датчик Холла работает как нуль-орган. При этом полоса частот, пропускаемая таким датчиком тока, составляет от 0 Гц (постоянный ток) до 200 кГц. Область применения электродвигатели с регулируемой скоростью вращения системы автомобильной диагностики защита от замыкания на землю системы защиты от перегрузки двигателей мониторинг токовой системы электросварочного оборудования защита силовых полупроводников системы диагностики
Сигма, дельта АЦП. Сигма-дельта модуляция – способ представления сигнала, использующий принципы избыточной дискретизации и формирования шума квантования. За счет избыточной дискретизации снижается уровень шума в полосе, содержащей полезный сигнал. За счет формовки шума этот уровень становится ещё ниже, правда, за счет увеличения уровня шума за пределами рабочей полосы. Таким образом, сигма-дельта модулятор — это система, обеспечивающая оцифровку сигнала с заданными характеристиками в рабочей полосе.
Чаще всего сигма-дельта модуляция применяется в микросхемах АЦП и ЦАП звукового диапазона частот. Это обусловлено сравнительно небольшими требованиями таких систем к диапазону частот и значительными требованиями к уровню шумов и динамическому диапазону системы. Широкое применение сигма-дельта модуляция нашла также в микросхемах АЦП для прецизионных медленных измерений с большим динамическим диапазоном (от 16 до 24 бит). Как следствие широкого применения сигма-дельта ЦАП в воспроизведении аудиосигнала возникли попытки оптимизировать форматы хранения аудио на цифровых носителях под эту технологию. Преимущества форматов, основанных на сигма-дельта модуляции — отсутствие необходимости понижения частоты дискретизации сигнала (децимации). Наиболее известный пример формата — Super Audio CD, предложенный фирмами Sony и Philips. Параметры формата — 1 бит, 2,8224 МГц. Относительно прогрессивности данного формата широко ведутся споры. Тестовые замеры устройств, реализующих кодирование в поток DSD (Direct Stream Digital = Прямой цифровой поток), используемый в SACD, не показывают значительного преимущества над PCM, который используется в DVD-Audio, скорее наоборот. Кроме того, существуют альтернативные разработки — например, российский энтузиаст аудио Игорь Чуфаров предлагает в качестве новой методики звукозаписи DMS-SDM (Direct Multibit Stream from Sigma-Delta Modulator = Прямой мультибитный поток с сигма-дельта модулятора), использующую преимущества как DSD, так и PCM. При этом сохраняется идея об отсутствии прореживания сигнала, но используется мультибитный сигма-дельта модулятор, за счет чего улучшается качество и повышается стабильность сигма-дельта модулятора. Последовательный порт SPI. Интерфейс порта SPI (Serial Peripheral Interface) предназначен для высокоскоростного обмена между микроконтроллером ST7 и периферийными микросхемами, такими как АЦП и ЦАП, FLASH-память большой информационной емкости, часы реального времени. Данный интерфейс может быть также использован для обмена между двумя микроконтроллерами, расположенными на небольшом расстоянии. Достоинством синхронной последовательной приемо-передачи с использованием протокола SPI является полный дуплексный обмен данными, что в случае необходимости позволяет реализовать экономичную потенциальную развязку между приемником и передатчиком. Интерфейс основан на сдвиговом регистре, который предназначен для выполнения преобразования последовательного интерфейса в параллельный, а также для обратного преобразования. Интерфейс трехпроводный, состоит из двух каналов данных и одного канала синхронизации (рис. 1.18). Рис. 1.18. Интерфейс порта SPI
Настройка интерфейса SPI осуществляется с помощью регистра SPICR (SPI Control Register), описание битов данного регистра приведено ниже в табл. 1.13. Таблица 1.13 Регистр SPICRБит 7 Бит 6 Бит 5 Бит 4 Бит 3 Бит 2 Бит 1 Бит 0 SPIE SPE SPR2 MSTR CPOL CPHA SPR1 SPRO Предназначение битов регистра SPICR: SPIE – разрешение прерываний (0 – прерывания запрещены); SPE – разрешение выхода (1 – SPI подключен к внешнему устройству); MSTR – признак MASTER или SLAVE (1 – MASTER); CPOL – полярность тактового генератора; CPHA – используемый фронт тактового генератора; SPR0, SPR1, SPR2 – выбор рабочей частоты (табл. 1.14). Таблица 1.14 Выбор рабочей частотыЧастота SPR2 SPR1 SPRO FCPU / 4 1 0 0 FCPU / 8 0 0 0 FCPU / 16 0 0 1 FCPU / 32 1 1 0 FCPU / 64 0 1 0 FCPU / 128 0 1 1 Для просмотра статуса интерфейса SPI предназначен 8-битный регистр SPISR (SPI Status Register), описание битов данного регистра приведено ниже. Таблица 1.15 Регистр SPISRБит 7 Бит 6 Бит 5 Бит 4 Бит 3 Бит 2 Бит 1 Бит 0 SPIF WCOL OVR MODF - SOD - - Предназначение битов регистра SPISR: SPIF – флаг передачи данных (1 == передача данных завершена); WCOL – статус коллизий записи; SOD – запрещение выхода SPI (выход SPI разрешен, если SPE=1); MODF – флаг ошибки режима; OVR – ошибка переполнения SPI. Биты SPIF, WCOL, MODF, OVR доступны только для чтения. Пример инициализации порта SPI показан на рис. 1.20. В аккумулятор загружается константа, содержащая требуемые настройки порта, затем содержимое аккумулятора записывается в регистр управления портом SPICR. АЦП R-2R суммирующий I. Характеристики: • 10-разрядная разрешающая способность • 70 - 280 мкс время преобразования • До восьми мультиплексированных входных каналов • Режимы преобразования: постоянное или одиночное • Прерывание при окончании преобразования • Режим шумоподавления Микроконтроллер имеет 10-разрядный АЦП. АЦП соединен с аналоговым мультиплексором с восемью каналами, который позволяет каждый вывод порта А использовать как вход АЦП. АЦП содержит специальный усилитель, который гарантирует, что входное напряжение АЦП удерживается на постоянном уровне в течение преобразования. АЦП может работать в двух режимах – одиночного и постоянного преобразования. В режиме одиночного преобразования каждое преобразование должно быть запущено пользователем. В режиме постоянного преобразования АЦП постоянно производит преобразование и модифицирует регистр данных АЦП. ADFR бит в ADCSR позволяет сделать выбор между двумя доступными режимами. АЦП включается путем записи логической единицы в бит разрешения Последовательный порт UART. Состав: Приемник, передатчик, тактовый генератор и регистор управления. Передатчик получает 1 байт информации с шины данных и формирует кадр для передачи информации - 8 информационных битов, стартовый бит и дополнительный. Тактовый генератор определяет скорость приема. Таймер/счетчик 1 Микроконтроллер имеет до трех универсальных таймеров-счетчиков (Т/С): два 8-разрядных T/C и один 16-разрядный T/C. Т/С2 может быть связан с внешним генератором. Этот генератор оптимизирован для использования с кристаллом 32.768 кГц, что допускает использование Т/С2 как часов реального времени (RTC). Т/С2 имеет собственный делитель частоты. Т/С0 и Т/С1 имеют индивидуальные установки масштаба от одного и того же 10-разрядного делителя частоты. Эти таймеры-счетчики могут использоваться и как таймеры с внутренним счетом времени, и как счетчики с внешним входом, который переключает счет 16-разрядный Т/С1 может использовать источник тактов CK, масштабированный CK или внешний вывод. Различные флаги состояния (переполнение, соответствие и захват) и управляющие сигналы присутствуют в регистрах управления таймера/счетчика1 – TCCR1A и TCCR1B. Разрешение прерываний для Т/С1 находятся в регистре маски прерываний TIMSK. Когда Т/С1 работает от внешнего генератора, внешний сигнал синхронизируется с частотой тактового генератора CPU. Т/С1 имеет высокое разрешение и высокую точность при использовании с низкой частотой. Его целесообразно использовать для реализации медленных функций или точных временных функций с нечастыми действиями. Т/С1 поддерживает две функции сравнения выхода, использующие регистры сравнения выхода OCR1A и OCR1B как источники данных, которые нужно сравнить с содержанием Т/С1. Функции сравнения выхода включают озможность очистки счетчика при соответствии A и действия на соответствующих выводах МК (ОС1А, ОС1В). Т/С1 может также использоваться как 8-, 9- или 10-разрядный ШИМ. В этом режиме счетчик и регистры OCR1A/OCR1B служат как двойной свободный от сбоев автономный ШИМ с центрированными импульсами. Функция захвата входа обеспечивает захват содержания Т/С1 в регистр сбора данных – ICR1, вызывается внешним событием на выводе захвата входа МК – ICР. Фактические установки события захвата данных определяются регистром управления TCCR1B. Кроме того, функция захвата входа может активизироваться аналоговым компаратором. Таймер/счетчик 0. 8-разрядный Т/С0 может использовать источник тактов CK (тактовый генератор микроконтроллера), масштабированный CK или внешний вход. Флаг состояния переполнения присутствует в регистре флагов прерываний таймеров-счетчиков – TIFR. Сигналы управления присутствуют в регистре управления таймера-счетчика – TCCR0. Установки разрешения прерываний находятся в регистре маски прерываний таймеров-счетчиков – TIMSK. Когда Т/С0 работает от внешнего генератора, внешний сигнал синхронизируется с частотой тактового генератора CPU. Чтобы гарантировать правильное осуществление выборки внешних тактов, минимальное время между двумя внешними переключениями должно быть не менее одного такта CPU. Переходы внешнего сигнала считаются на фронте такта CPU. Т/С0 имеет высокое разрешение и высокую точность при использовании с низкой частотой. Его целесообразно использовать для реализации медленных функций или точных временных функций с нечастыми действиями.
Таймер счетчик 2. 8-разрядный Т/С2 может использовать источник тактов РCK (по умолчанию = СК) или масштабированный РCK. Флаги состояния (переполнение и соответствие) присутствуют в регистре флагов прерываний таймеров-счетчиков – TIFR. Сигналы управления присутствуют в регистре управления таймера-счетчика – TCCR2. Установки разрешения прерываний находятся в регистре маски прерываний таймеров- счетчиков – TIMSK. Т/С2 имеет высокое разрешение и высокую точность при использовании с низкой частотой. Его целесообразно использовать для реализации медленных функций или точных временных функций с нечастыми действиями. Т/С2 поддерживает функцию сравнения выхода, использующую регистр сравнения выхода OCR2 как источник данных, которые нужно сравнить с содержанием Т/С2. Функция сравнения выхода включает возможность очистки счетчика при соответствии и действия на соответствующем выводе МК (ОС2). Т/С2 может также использоваться как 8-разрядный ШИМ. В этом режиме счетчик и регистр OCR2 служат как двойной свободный от сбоев автономный ШИМ с центрированными импульсами. АЦП последовательного типа Последовательные АЦП бывают последовательного счета и последовательного приближения. Типичная схема АЦП последовательного счета приведена на рисунке 5.
Рис. 5 - АЦП последовательного счета Рис. 6 - АЦП последовательного приближения На схеме буквами и символами обозначены следующие элементы: К - компаратор, & - схема "И", ГТИ - генератор тактовых импульсов, СТ - счетчик, #/A - ЦАП. На один вход компаратора подается входное напряжение, на второй - напряжение с выхода ЦАП. В начале работы счетчик устанавливается в нулевое состояние, напряжение на выходе ЦАП при этом равно нулю, а на выходе компаратора устанавливается лог. 1. При подаче импульса разрешения "Строб" счетчик начинает считать импульсы от генератора тактовых импульсов, проходящих через открытый элемент "И". Напряжение на выходе ЦАП при этом линейно нарастает, пока не станет равным входному. При этом компаратор переключается в состояние лог. 0 и счет импульсов прекращается. Число, установившееся на выходе счетчика и есть пропорциональный входному напряжению цифровой код. Выходной код остается неизменным пока длится импульс "Строб", после снятия которого счетчик устанавливается в нулевое состояние и процесс преобразования повторяется. Такие АЦП имеют низкое быстродействие. Достоинством является сравнительная простота построения. Более быстродействующим являются АЦП последовательного приближения, называемый также АЦП с поразрядным уравновешиванием. АЦП последовательного приближения показан на рисунке 6. В основе работы таких преобразователей лежит принцип дихотомии - последовательного сравнения измеряемой величины с ½, ¼, ⅛ и т. п. от возможного ее максимального значения. В таком АЦП используется спешиал регистр - регистр последовательных приближений. При подаче импульса "Пуск" на выходе старшего разряда регистра появляется лог. 1, а на выходе ЦАП напряжение U1. Если это напряжение меньше входного, то в следующем по счету разряде регистра записывается еще лог. 1. Если же входное напряжение меньше, то лог. 1 в старшем разряде отменяется. Таким образом, методом проб перебираются все разряды - от старшего до младшего. На всю операцию преобразования требуется импульсов ГТИ всего в два раза больше количества разрядов. То есть АЦП последовательных приближений намного шустрее АЦП последовательного счета.
Передаточная функция двигателя по обмотке возбуждения. 2) Преобразователь координат α-β в x-y
Cкалярное управление АД Скалярное управление или U/f-регулирование асинхронным двигателем – это изменение скорости двигателя путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U/f-регулировании частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. При этом частота принимается за независимое воздействие, а значение напряжения при данной частоте определяется исходя из того, как должен изменяться вид механических характеристик привода при изменении частоты, т.е., из того, как должен меняться в зависимости от частоты критический момент. Для реализации такого закона регулирования необходимо обеспечить постоянство соотношения U/f=const, где U-напряжение на статоре, а f-частота напряжения статора. При постоянстве перегрузочной способности номинальные коэффициент мощности и к.п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются. К законам U/f-регулирования можно отнести законы, связывающие величины и частоты питающего двигатель напряжения (U/f=const, U/f2=const и другие). Их достоинством является возможность одновременного управления группой электродвигателей. Скалярное управление используется для большинства практических случаев применения частотного электропривода с диапазоном регулирования частоты вращения двигателя без использования датчика обратной связи до 1:40. Алгоритмы скалярного управления не позволяют реализовать контроль и управление вращающим моментом электродвигателя, а также режим позиционирования. Наиболее эффективная область применения данного способа управления: вентиляторы, насосы, конвейеры и т.д. Вентильный двигатель Вентильный электродвигатель — это синхронный двигатель, основанный на принципе частотного регулирования с самосинхронизацией, суть которого заключается в управлении вектором магнитного поля статора в зависимости от положения ротора.
В вентильном двигателе (ВД) индуктор находится на роторе (в виде постоянных магнитов), якорная обмотка находится на статоре (синхронный двигатель). Напряжение питания обмоток двигателя формируется в зависимости от положения ротора. Если в двигателях постоянного тока для этой цели использовался коллектор, то в вентильном двигателе его функцию выполняет полупроводниковый коммутатор (датчик положения ротора (ДПР) с инвертором). Основным отличием ВД от синхронного двигателя является его самосинхронизация с помощью ДПР, в результате чего у ВД, частота вращения поля пропорциональна частоте вращения ротора. Статор имеет традиционную конструкцию и похож на статор асинхронной машины. Он состоит из корпуса, сердечника из электротехнической стали и медной обмотки,уложенной в пазы по периметру сердечника. Количество обмоток определяет количество фаз двигателя. Для самозапуска и вращения достаточно двух фаз — синусной и косинусной. Обычно ВД трёхфазные. Ротор изготавливается с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов с чередованием северного и южного полюсов. Датчик положения ротора (ДПР) реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах — фотоэлектрический, индуктивный, на эффекте Холла, и т. д. Наибольшую популярность приобрели датчики Холла и фотоэлектрические, так как они практически безинерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
|
Последнее изменение этой страницы: 2019-04-20; Просмотров: 388; Нарушение авторского права страницы







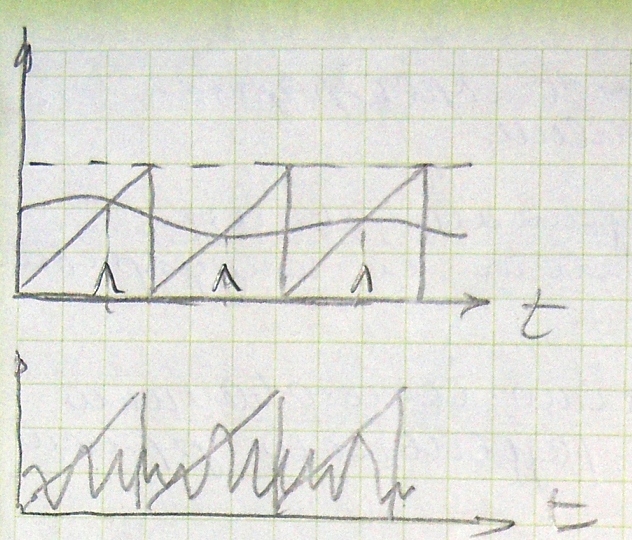






 Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.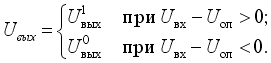

 В качестве компаратора может быть использован операционный усилитель (ОУ) так, как это показано на рис. 3. Усилитель включен по схеме инвертирующего сумматора, однако, вместо резистора в цепи обратной связи включены параллельно стабилитрон VD1 и диод VD2.
В качестве компаратора может быть использован операционный усилитель (ОУ) так, как это показано на рис. 3. Усилитель включен по схеме инвертирующего сумматора, однако, вместо резистора в цепи обратной связи включены параллельно стабилитрон VD1 и диод VD2. Переходы могут быть по заднему фронту 1-0, по переднему фронту 0-1, либо по любому ходу.. Все запросы, поступающие в блок прерываний имеют определённый приоритет.
Переходы могут быть по заднему фронту 1-0, по переднему фронту 0-1, либо по любому ходу.. Все запросы, поступающие в блок прерываний имеют определённый приоритет.
 47) Система команд арифметических операций.
47) Система команд арифметических операций.