
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ПЧ со звеном постоянного тока и неуправляемым выпрямителем.
Мостовые измерительные схемы. При электрических измерениях, а также в некоторых других случаях резисторы включают по схеме электрического моста, или мостовой схеме (рис. 28, а). Резисторы с сопротивлениями R1, R2, Rз, R4 образуют так называемые плечи моста. Участки цепи, соединяющие точки а и с, а также b и d, называются диагоналями моста. Обычно на одну из диагоналей, в данном случае ас (питающая диагональ), подается напряжение U от источника электрической энергии; в другую диагональ bd (измерительная диагональ) включают электроизмерительный прибор или какой-либо аппарат. При равенстве сопротивлений R1=R4 и R2=R3 напряжения на участках ab и ad от токов I1 и I2(а также на участках bc и dc) будут одинаковыми, поэтому точки b и d будут иметь одинаковые потенциалы. Следовательно, если включить в диагональ bd какой-либо резистор R или электроизмерительный прибор, то в диагонали I=0 (рис. 28, б). Такой мост называется уравновешенным.
в диагональ моста, образованного двумя последовательно включенными электродвигателями М1 и М2, по которым проходит ток Iд (электродвигатели в данном случае рассматриваются как источники с э. д. с. E1 и E2), и двумя резисторами сопротивлением R. При отсутствии буксования Е1=Е2, следовательно, токи, проходящие через резисторы, I1 = I2. Поэтому ток в катушке реле I = I1 – I2 = 0. При возникновении буксования частота вращения тягового двигателя, связанного с буксующей колесной парой, резко возрастает. При этом резко увеличиваются его э. д. с, например E1, и ток I1. В результате по катушке реле Р начнет проходить ток I=I1-I2, который вызовет его срабатывание. Реле Р своим блок-контактом включает сигнализацию и подачу песка или воздействует на систему управления электровоза.
Непосредственный ПЧ. Преобразователь частоты – это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты. Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и нижечастоты питающей сети. Схема любого преобразователя частоты состоит изсиловойи управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита). Преобразователи частоты, применяемые в регулируемом электроприводе, в зависимости от структуры и принципа работы силовой части разделяются на два класса: 1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока. 2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока). Каждый из существующих классов преобразователей имеет свои достоинства инедостатки, которые определяют область рационального применения каждого из них.
Исторически первыми появились преобразователи с непосредственной связью (рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя. «Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к.п.д. системы в целом. Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся: - практически самый высокий КПД относительно других преобразователей (98,5% и выше), - способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах, - относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования. Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются. ЭМУ с поперечным полем. Электромашинные усилители (ЭМУ) применяют в схемах автоматики для усиления управляющих сигналов, получаемых от различных датчиков, сельсинов, поворотных трансформаторов и других устройств. Электромашинные усилители представляют собой специальные электрические генераторы постоянного или переменного тока, выходная мощность которых может изменяться в широких пределах путем изменения мощности управления. Отношение выходной мощности к мощности управления называют коэффициентом усиления по мощности. Современные ЭМУ имеют весьма большие коэффициенты усиления, необходимые для усиления сравнительно слабых управляющих сигналов. В системах автоматического регулирования электромашинные усилители применяются в качестве усилителей мощности и работают в основном при переходных режимах, в процессе которых возникают значительные перегрузки по току. Поэтому одним из требований к электромашинному усилителю является хорошая перегрузочная способность. К числу важнейших требований, предъявляемых к электромашинному усилителю, относятся надежность в работе и стабильность характеристик. Электромашинные усилители, используемые на самолетах и транспортных установках, должны обладать минимальными габаритами и весом. В промышленности наибольшее распространение получили независимый электромашинный усилитель, электромашинный усилитель с самовозбуждением и электромашинный усилитель поперечного поля с диаметральным шагом. Коэффициент усиления по мощности независимого ЭМУ не превышает 100. С целью повышения коэффициента усиления по мощности ЭМУ были созданы электромашинные усилители с самовозбуждением. Конструктивно ЭМУ с самовозбуждением (ЭМУС) отличается от независимого ЭМУ только тем, что на его полюсах возбуждения соосно с обмотками управления размещается обмотка самовозбуждения, включаемая параллельно обмотке якоря или последовательно с ней. Τаκие усилители применяются главным образом для питания обмотки возбуждения генератора в системе генератор—двигатель и в этом случае длительность переходного процесса определяется постоянной времени генератора. В отличие от независимого ЭМУ и ЭМУ с самовозбуждением (ЭМУС), в которых основным потоком возбуждения является продольный магнитный поток, направленный вдоль полюсов возбуждения, в ЭМУ поперечного поля основным потоком возбуждения является поперечный поток реакции якоря. Важнейшей статической характеристикой ЭМУ поперечного поля является коэффициент усиления по мощности. Высокий коэффициент усиления по мощности получается за счет того, что ЭМУ поперечного поля является двухступенчатым усилителем. Первая ступень усиления: обмотка управления — короткозамкнутая цепь поперечных щеток. Вторая ступень: короткозамкнутая цепь поперечных щеток — выходная цепь продольных щеток. Поэтому общий коэффициент усиления по мощности kp = kp1kp2, где kp1—коэффициент усиления 1-й ступени; kp2— коэффициент усиления 2-й ступени. При использовании электромашинных усилителей в замкнутых системах автоматического регулирования (стабилизаторы, регуляторы, следящие системы) машина должна быть несколько недокомпенсирована (к=0,97÷0,99), так как в случае перекомпенсации в системе во время работы возникнет ложное возмущение за счет остатка м. д. с. компенсационной обмотки, которое приведет к возникновению автоколебаний системы. Общий коэффициент усиления по мощности ЭМУ поперечного поля пропорционален четвертой степени скорости вращения якоря, магнитным проводимостям по поперечной и продольной осям и зависит от соотношения сопротивлений обмоток машины и нагрузки. Отсюда следует, что усилитель будет иметь тем больший коэффициент усиления по мощности, чем меньше будет насыщена его магнитная цепь и чем выше будет скорость его вращения. Чрезмерно увеличивать скорость вращения нельзя, так как начинает сильно возрастать действие коммутационных токов. Поэтому при чрезмерном увеличении скорости за счет повышения коммутационных токов коэффициент усиления по мощности расти не будет, а может даже снижаться. Аналоговый компаратор. Компаратор - это сравнивающее устройство. Аналоговый компаратор предназначен для сравнения непрерывно изменяющихся сигналов. Входные аналоговые сигналы компаратора суть Uвх - анализируемый сигнал и Uоп - опорный сигнал сравнения, а выходной Uвых - дискретный или логический сигнал, содержащий 1 бит информации:
Выходной сигнал компаратора почти всегда действует на входы логических цепей и потому согласуется по уровню и мощности с их входами. Таким образом, компаратор - это элемент перехода от аналоговых к цифровым сигналам, поэтому его иногда называют однобитным аналого-цифровым преобразователем. Неопределенность состояния выхода компаратора при нулевой разности входных сигналов нет необходимости уточнять, так как реальный компаратор всегда имеет либо конечный коэффициент усиления, либо петлю гистерезиса (рис. 1).
Рис. 1. Характеристики компараторов
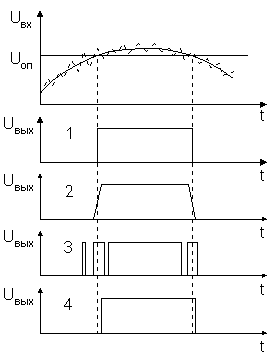
Рис. 2. Процессы переключения компараторов Чтобы выходной сигнал компаратора изменился на конечную величину |U1вых - U0вых| при бесконечно малом изменении входного сигнала, компаратор должен иметь бесконечно большой коэффициент усиления (эпюра 1 на рис. 2) при полном отсутствии шумов во входном сигнале. Такую характеристику можно имитировать двумя способами - или просто использовать усилитель с очень большим коэффициентом усиления, или ввести положительную обратную связь. Рассмотрим первый путь. Как бы велико усиление не было, при Uвх близком к нулю характеристика будет иметь вид рис. 1а. Это приведет к двум неприятным последствиям. Прежде всего, при очень медленном изменении Uвх выходной сигнал также будет изменяться замедленно, что плохо отразится на работе последующих логических схем (эпюра 2 на рис. 2). Еще хуже то, что при таком медленном изменении Uвх около нуля выход компаратора может многократно с большой частотой менять свое состояние под действием помех (так называемый "дребезг", эпюра 3). Это приведет к ложным срабатываниям в логических элементах и к огромным динамическим потерям в силовых ключах. Для устранения этого явления обычно вводят положительную обратную связь, которая обеспечивает переходной характеристике компаратора гистерезис (рис. 1б). Наличие гистерезиса хотя и вызывает некоторую задержку в переключении компаратора (эпюра 4 на рис. 2), но существенно уменьшает или даже устраняет дребезг Uвых.
Рис. 3. Схема компаратора на ОУ Пусть R1 = R2. Если Uвх - Uоп > 0, то диод VD2 открыт и выходное напряжение схемы небольшое отрицательное, равное падению напряжения на открытом диоде. При Uвх - Uоп < 0 на стабилитроне установится напряжение, равное его напряжению стабилизации Uст. Это напряжение должно соответствовать единичному логическому уровню цифровых интегральных микросхем (ИМС), входы которых подключены к выходу компаратора. Таким образом, выход ОУ принимает два состояния, причем в обоих усилитель работает в линейном режиме. Многие типы ОУ не допускают сколько-нибудь существенное входное дифференциальное напряжение. Включение по схеме на рис. 3 обеспечивает работу ОУ в режиме компаратора практически с нулевыми дифференциальными и синфазными входными напряжениями. Недостатком данной схемы является относительно низкое быстродействие, обусловленное необходимостью частотной коррекции, так как ОУ работает в линейном режиме со 100%-ной обратной связью. Используя для построения компаратора обычные ОУ, трудно получить время переключения менее 1 мкс. |
Последнее изменение этой страницы: 2019-04-20; Просмотров: 222; Нарушение авторского права страницы
 Рис. 28. Мостовые схемы включения резисторов Рис. 29. Схема включения реле боксования
Рис. 28. Мостовые схемы включения резисторов Рис. 29. Схема включения реле боксования
 Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение uа, uв, uс. Выходное напряжение uвых имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.

 В качестве компаратора может быть использован операционный усилитель (ОУ) так, как это показано на рис. 3. Усилитель включен по схеме инвертирующего сумматора, однако, вместо резистора в цепи обратной связи включены параллельно стабилитрон VD1 и диод VD2.
В качестве компаратора может быть использован операционный усилитель (ОУ) так, как это показано на рис. 3. Усилитель включен по схеме инвертирующего сумматора, однако, вместо резистора в цепи обратной связи включены параллельно стабилитрон VD1 и диод VD2.