|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
И сопряжения с другими навигационными средствами
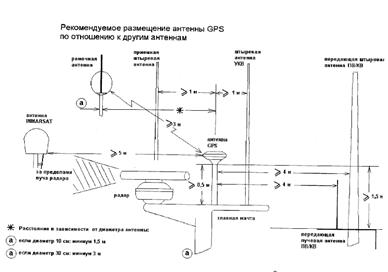
Для уверенного приема сигналов навигационных спутников и обеспечения электромагнитной совместимости с другим радиоэлектронным оборудованием антенну приемника GPS устанавливают на высшей точке судна, где гарантируется минимальное время прерывания связи со спутником и обеспечивается максимальный обзор над горизонтом. Вариант взаимного размещения судовых антенн и антенного поста приемника спутниковой навигационной системы показан на рис.1. Дисплей приемоиндикатора располагается в любом удобном для оператора месте, но на расстоянии от магнитного компаса не менее указанного в документации. Для сопряжения приемоиндикаторов GPS с другими навигационными приборами (плоттерами, РЛС, эхолотами и т.д.), средствами управления движением судна и автоматизированной радиосвязи в состав оборудования вводятся интерфейсы, формирующие сигналы обмена. В первых разработках судового навигационного оборудования ведущие фирмы-изготовители разрабатывали свои форматы представления информации: Фуруно (Япония) — формат CIF, JRC (Japan Radio Co.,LTD) — формат JRC, Koden (Япония) — формат Koden, Shipmate (Дания) — формат Shipmate.
Рис. 1.
В настоящее время используется единый формат — NMEA (National Marine Electronic Association — Национальная морская электронная ассоциация), который представляет собой последовательность цифровых данных по параметрам движения судна. Передача данных NMEA 0183 осуществляется 8‑ми битовыми ASCII кодами со скоростью 4800 Бод, с выходным уровнем напряжения 0—5В и периодичностью 2 секунды. Различия в кодах определяется составом форматов NMEA:
В сообщениях формата NMEA передается следующая информация: — АРА: ошибка авторулевого (XTE - Cross Track Error), заданный курс, статус GPS, статус маршрута, название точки назначения, пеленг на нее (старый формат); — APB: дополнительно к составу данных APA приводится курс для выхода в точку назначения, пеленг в точку назначения из текущих координат (магнитный или истинный); — BWC: расстояние и пеленг на путевую точку; — GGA: координаты GPS, время, качество определения координат, количество задействованных спутников, HDOP (горизонтальная потеря точности), исходная дифференциальная информация, срок поступления данных; — GLL: рассчитанные по GPS широта и долгота, время определения координат; — RMB: статус данных, XTE, направление управления, начальная точка, точка назначения, пеленг и скорость выхода в точку назначения; — RMC: время, широта, долгота, скорость и курс относительно грунта, дата; · VTG: магнитный и истинный курс, скорость относительно грунта (в узлах и км/ч).
На дисплее приемоиндикатора сообщение GLL в формате NMEA 0183 будет выглядеть следующим образом: 1 2 3 4 5 6 7 $GPGLL,DDMM.mm,H,DDDMM.mm,H,hhmmss,A*BB<CR>, например: $GPGLL, 4728.31, N, 12254.25, W, 091342,A* 21<CR> $ – символ начала сообщения; GP – источник навигационной информации (в данном случае, система GPS); GLL – вид сообщения; 4728.31,N – 47 градусов, 28,31 минут северной широты; 12254.25,W – 122 градуса, 54,25 минут западной долготы; 091342 – 09 часов, 13 минут, 42 секунды (время определения, UTC); А* – данные действительны (определены с заданной точностью); 21 – контрольная сумма; <CR><LF> – конец сообщения.
Аналогично отображаются на дисплее и другие сообщения:
APA 1 2 3 4 5 6 7 8 9 10 $GPAPA,A,A,X.XX,L,N,A,A,XXX,M,CCC<CR><LF>
1 —пропадание сигнала и отношение сигнал/шум (А‑ действительно, V‑ недействительно); 2 —блокировка цикла (А ‑ действительно, V ‑ недействительно); 3…5 —XTE, направление управления (L‑ влево, R‑ вправо) в морских милях; 6…7 —вход в зону допустимого отклонения от установленного курса, сигнализация выхода на рекомендованный курс в точку назначения; 8…9 —магнитный пеленг от текущей точки на точку назначения; 10 —идентификатор точки назначения.
BWC 1 2 3 4 5 6 7 8 9 10 11 12 $GPBWC,XXXXXX,XXXX.XX.N,XXXXX.XX,W,XXX.,T,XXX.,M,XXX.X,N,CCCC<CR> 1 —время определения пеленга; 2‑3 —широта точки назначения N или S; 4‑5 —долгота точки назначения E или W; 6‑7 —истинный пеленг; 8‑9 —магнитный пеленг; 10-11 —расстояние в морских милях; 12 —идентификатор точки назначения. GGA 1 2 3 4 5 6 7 8 9 10 11 12 13 14 $LCGGA,hhmmss.ss,lll.ll,a,yyyyy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx*hh<CR> 1 —время определения координат; 2‑3 —широта точки назначения N или S; 4‑5 —долгота точки назначения E или W; 6 —индикатор качества определения по GPS: 0= определение невозможно или сомнительно; 1= нормальное определение; 3= определение по DGPS; 7 —число используемых спутников; 8 —HDOP; 9-10 —высота антенны над уровнем моря и единицы измерения; 11-12 —значение и единицы измерения разницы между эллипсоидом WGS84 и средним уровнем моря (геоидом); 13 —время в секундах от последней поправки по DGPS; 14 —идентификатор станции, передающей дифференциальные поправки. RMB 1 2 3 4 5 6 7 8 9 10 11 12 13 14 $GPRMB,A,X.XX,L,CCCC,CCCC,DDMM.SS,N,XXXXX.XX,W,XXX.X,XXX.,XX.X,A*XX<CR> 1 —статус (А= действительно; V= недействительно); 2‑3 —XTE, морские мили и направление управления (L или R); 4 —идентификатор текущей точки назначения; 5 —идентификатор точки назначения; 6‑7 —широта точки назначения (N или S); 8‑9 —долгота точки назначения (Е или W); 10 —расстояние от текущей позиции до конечной точки назначения в морских милях; 11 —истинный пеленг от текущих координат в точку назначения; 12 —скорость в узлах в точку назначения; 13 —14 —контрольная сумма.
RMC 1 2 3 4 5 6 7 8 9 10 11 12 $LCRMC,XXXXXX,A,XXXX.XX,N,XXXXX.XX,W,XX.X,XXX.,XXXXXX,XX.,E*XX<CR> 1 —время, UTC 2 —статус (А= действительно, V= недействительно); 3‑4 —широта, N или S; 5‑6 —долгота, E или W; 7 —скорость относительно грунта, узлы; 8 —курс относительно грунта; 9 —дата (день/месяц/год); 10 —магнитное склонение, градусы; 11 —направление склонения, E или W; 12 —контрольная сумма.
VTG 1 2 3 4 5 6 7 8 $GPVTG,XXX.,T,XXX.,M,XX.X,N,XX.X,K<CR> 1‑2 —истинный курс, градусы; 3‑4 —магнитный курс, градусы; 5‑6 —скорость, узлы; 7‑8 —скорость, км/час. Для обеспечения дальнейшей эксплуатации существующего на судах парка радио- и электронавигационного оборудования в современных приемоиндикаторах GPS предусмотрены, как правило, возможности обмена навигационной информацией и в используемых ранее форматах. При подключении к приемоиндикатору других приборов необходимо: · выяснить полную структуру их сигналов обмена; · сопоставить с форматами, представляемыми для использования приемоиндикатором; · установить программно или с помощью дополнительных интерфейсов полное соответствие сигналов обмена. 1.4. Особенности использования морских навигационных и электронных карт при работе с приемоиндикаторами GPS
Высокая точность определения координат судна с помощью приемоиндикаторов GPS (особенно при работе в дифференциальном режиме) не может быть реализована без учета геодезической основы и системы координат, в которой составлены морские навигационные и электронные карты. Морские навигационные карты, выпускаемые в России, составлены в Пулковской системе координат 1942 г. или в геодезической системе SGS-90, в США — преимущественно в системе WGS-84 или WGS-72, в других странах мира — в местных геодезических системах, принятых в этих странах. В приемоиндикаторах GPS предусмотрен выбор той или иной геодезической системы (кроме геодезических систем, принятых в России). В ряде современных приемоиндикаторов предусмотрена возможность пересчета результатов навигационных определений в более 170 местных геодезических систем. Использование разных геодезических основ объясняется тем, что наименьшие погрешности (в частности, при нанесении береговой черты на картах) могут быть получены лишь при местных системах, привязанных к разным территориям Земного шара. Для примера в табл.2 приведены районы применения некоторых геодезических систем. Таблица 2
Перенос данных, полученных с помощью приемоиндикатора GPS в базе WGS-84, на морские карты в случае различия их геодезической основы приводит к погрешностям прокладки. Дополнительные возможности по обеспечению решения штурманских задач появились с введением в современные приемоиндикаторы GPS режима работы с электронными картами. Электронные карты не заменяют морские навигационные карты, однако их совместное использование облегчает работу штурмана. Носителями данных электронных карт являются постоянные запоминающие устройства приемоиндикаторов или сменные картриджи, устанавливаемые с передней панели приемоиндикатора. Электронные карты, предназначенные для работы в приемоиндикаторах GPS, выполнены, в основном, в системах WGS-84 и WGS-72, а наиболее точные морские навигационные карты для конкретных районов плавания — преимущественно в местных базах. Новые и откорректированные картриджи включают в себя информацию как о местной базе исходной морской навигационной карты, так и WGS-84. В этом случае при настройке приемоиндикатора отображение на дисплее электронных карт и результатов определения позиции по GPS могут выбираться как в местной геодезической базе, так и WGS-84 (международный стандарт). При обращении к режиму работы с электронной картой на дисплей приемоиндикатора выводится информация об издателе морской навигационной карты, перенесенной на электронный носитель (например, NOS — National Ocean Servey — Национальная служба исследования Океана) и о геодезической основе, в которой изготовлена исходная карта. Сообщение на дисплее CHART DATUM UNKNOWN свидетельствует об отсутствии информации о геодезической системе координат электронной карты. Многие приемоиндикаторы GPS позволяют автоматически вносить поправки в отображение положения судна на экране дисплея с изображением электронной карты, даже если в приемоиндикаторе работа с использованной геодезической базой не предусмотрена. Для получения поправки надо вывести судно на точку с известными координатами, произвести определение с помощью приемоиндикатора GPS и включить режим коррекции погрешности. После коррекции координаты отметки позиции судна будут совпадать с полученными с помощью приемоиндикатора координатами. Этот режим позволяет исключить все постоянные погрешности при определении координат. Однако следует учитывать, что интервал корреляции ионосферных погрешностей составляет около 15 мин, а намеренно вводимых в код С/А GPS погрешностей (Selective Availability) —около 6 мин. При работе с приемоиндикаторами GPS следует учитывать и систему координат, в которой выдаются результаты навигационных измерений. В настоящее время практическое применение в приемоиндикаторах получили следующие координатные системы: · Lat/Long (Latitude/Longitude — широта/долгота); · UTM (Universal Transverse Mercator — Универсальный поперечный Меркатор); · TD (Time difference of arrival — разница во времени поступления сигнала); · OSGB (Ordnance survey og Great Britan — Артилерийская топография Великобритании). В морской навигации основное применение получила система координат Lat/Long, представляющая собой указание широты места в градусной мере, отсчитываемой от экватора на север (N) или юг (S), и долготы, отсчитываемой от начального (Гринвического) меридиана на восток (Е) или запад (W). Система UTM в морской практике используется реже. В этой системе вся земная поверхность между 84 с.ш. и 80 ю.ш. разбита на 60 зон по 6 градусов каждая. Местоположение судна в этой системе описывается тремя элементами: зоной нахождения, восточным и северным удалениями (в метрах) на координатной сетке. Так, например, координаты судна на дисплее приемоиндикатора в этих системах будут представлены в виде: Таблица 3
Система координат TD вошла в морские карты, когда были введены в эксплуатацию навигационные системы Лоран, и представляет собой сетку линий положений (LOP) на которых нанесены временные задержки прихода импульсов от станций системы Лоран. Другие системы (например OSGB) могут использоваться совместно с навигационными картами, выпущенными в других геодезических базах, отличных от WGS84 или WGS72. Для удобства работы с морскими картами выбор геодезических баз и координатных систем осуществляется оператором через вспомогательные меню приемоиндикатора GPS.
|
|||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-05-08; Просмотров: 175; Нарушение авторского права страницы