
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Определение ПФ сепаратных регуляторовСтр 1 из 4Следующая ⇒
Исследование свойств сепаратных каналов МСАР Прямые и частотные показатели качества переходного процесса Для определения прямых показателей качества переходного процесса получим переходные характеристики первого и второго сепаратных каналов с помощью программного пакета MATLAB (Приложение 2) 1) Первый сепаратный канал Переходная характеристика для первого сепаратного канала изображена на рисунке 1.8.
Рисунок 1.8 – Переходная характеристика первого сепаратного канала Используя график переходной характеристики определим время переходного процесса как время, по истечении которого отклонение управляемой величины от установившегося значения станет менее 5%.
Определим перерегулирование как отношение максимального отклонения управляемой величины от своего установившегося значения к установившемуся значению.
Частотный показатель качества переходного процесса – показатель колебательности – был определен в п. 1.1 в рамках проверки свойств сепаратного канала. 2) Второй сепаратный канал Переходная характеристика для второго сепаратного канала изображена на рисунке 1.9.
Рисунок 1.9 – Переходная характеристика второго сепаратного канала
Аналогично первому сепаратному каналу:
Определим перерегулирование по формуле (1.10)
Частотный показатель качества переходного процесса – показатель колебательности – был определен в п. 1.1 в рамках проверки свойств сепаратного канала. Показатели точности Определим показатели точности в виде амплитудных (δ А) и фазовых (δ φ ) искажений на частоте w1=0, 3 wср2 Частота среза второго сепаратного канала определена техническим заданием. wср2=33 рад/с, w1=0, 3∙ 33=9, 9 рад/с. Найдем амплитудно-фазовые искажения для каждого сепаратного канала по формулам:
где
1) Первый сепаратный канал Запишем частотную передаточную функцию замкнутого канала, используя формулу (1.2):
Определим амплитудные искажения:
Определим фазовые искажения:
где Q( w) и P( w) – мнимая и действительная часть частотной передаточной функции замкнутого канала.
2) Второй сепаратный канал Запишем частотную передаточную функцию замкнутого канала:
Определим амплитудные искажения:
Определим фазовые искажения:
Запасы устойчивости Определим запасы устойчивости сепаратных каналов, используя критерий Найквиста на плоскости ЛЧХ. Построим ЛЧХ разомкнутых сепаратных каналов. (Рисунок 1.10) По графикам определим запасы устойчивости
1.3 Исследование свойств исходной МСАР (при W k( p)= E)
Изобразим структурную схему МСАР с учетом перекрестных связей в многомерном объекте управления (Рисунок 1.11)
Рисунок 1.11 – Структурная схема МСАР с учетом перекрестных связей в МОУ Передаточная матрица
где
Устойчивость исходной МСАР 1) Обобщенный критерий Найквиста Запишем передаточную матрицу разомкнутой системы, изображенной на рисунке 1.10
Выражение для получения характеристического уравнения:
det [ E + W (p)] = 0. (1.16)
Здесь [ E + W (p)] – матрица возвратных разностей. Ее определитель представляет собой дробно-рациональную функцию H(p), в числителе которой – характеристический полином jз(p) для замкнутой МСАР, а в знаменателе – характеристический полином jр(p) для разомкнутой МСАР: H( p ) = jз( p )/ jр( p ). (1.17)
Эта особенность функции H(p) используется для получения обобщенногокритерия Найквиста при исследовании устойчивости замкнутой МСАР. С помощью программного пакета MathCAD найдем характеристический полином разомкнутой МСАР (Приложение 3а). Приравняем полученный полином к нулю и получим корни характеристического уравнения разомкнутой МСАР:
Разомкнутая МСАР находится на апериодической границе устойчивости. Построим обобщенный годограф Найквиста. Произведем замену
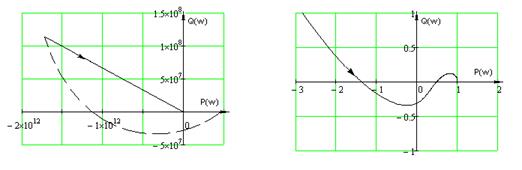
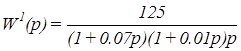
Построим обобщенный годограф Найквиста (рисунок 1.12) с помощью программного пакета MathCAD (Приложение 3б).
Рисунок 1.12 – Обобщенный годограф Найквиста а) годограф на высокочастотном участке б) годограф на среднечастотном участке в) общий вид годографа
Если разомкнутая система находится на апериодической границе устойчивости, то для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, охватывает точку с координатами (0; j0) (рисунок 1.12 в), то замкнутая МСАР является неустойчивой. 2) Метод эквивалентирования относительно первого канала Рассмотрим детализирванную до уровня одномерных звеньев структурную схему МСАР (Рисунок 1.13)
Рисунок 1.13 – Детализирванная до уровня одномерных звеньев структурная схема МСАР
Изобразим структурною схему с учетом только внешнего воздействия первого канала регулирования, тогда второй канал регулирования представим эквивалентным звеном (Рисунок 1.14). Определим передаточную функцию эквивалентного звена:
Рисунок 1.14 – Структурная схема с эквивалентным второму каналу регулирования звеном
Запишем передаточную функцию разомкнутой системы
Для устойчивости системы необходимо и достаточно, чтобы все корнии ее характеристического уравнения были левыми. Запишем характеристическое уравнение замкнутой системы:
С помощью программного пакета MathCad найдем его корни (Приложение 4)
Не все корни характеристического уравнения замкнутой системы левые, следовательно, система неустойчива. Сепаратные каналы |
Автономные каналы | |||||||
|
Канал |
Канал |
Прямые ПС |
Прямые ПС | |||||
|
До корректировки |
После корректир. | |||||||
| 1 канал | 2 канал | 1 канал | 2 канал | 1 канал | 2 канал | |||
Амплитудные искажения 
| 8, 2 | 15 | 0, 11 | 0, 14 | 8, 2 | 15 | 8, 2 | 15 |
Предполагая, что установившийся режим существует для каждого из вариантов перекрестных связей в компенсаторе, можно отметить, что прямые перекрестные связи обеспечивают большую точность по величине амплитудных искажений.
2. Синтез и исследование микропроцессорной МСАР
Устойчивость цифровой МСАР
Запишем передаточную матрицу приведенной непрерывной части:
 ,
,
 . (2.1)
. (2.1)
Запишем частотную передаточную матрицу ДЗ ПНЧ:
 , (2.2)
, (2.2)
где  , здесь
, здесь  частота дискретизации.
частота дискретизации.
Определим значение частоты дискретизации:

Получим передаточную матрицу цифрового корректирующего устройства по методу трапеций подстановкой  :
:
 (2.3)
(2.3)
Частотно-передаточная матрица разомкнутой системы запишется в виде

Определитель матрицы возвратных разностей:

Построим обобщенный годограф Найквиста с помощью MathCAD.

а) б)
Рисунок 2.6 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0), то цифровая МСАР при  является устойчивой.
является устойчивой.
Проверим устойчивость цифровой МСАР с помощью обобщенного критерия Найквиста при увеличенном в три раза расчетном значении  :
:

Передаточную матрицу приведенной непрерывной части, частотную передаточную матрицу ДЗ ПНЧ, дискретную передаточную матрицу цифрового корректирующего устройства определим по формулам (2.1) – (2.3).
Построим годограф Найквиста с помощью программного пакета MathCAD.
а) б)
Рисунок 2.7 – Обобщенный годограф Найквиста цифровой МСАР
а) общий вид годографа Найквиста
б) построение годографа в области высоких частот;
Разомкнутая система не имеет правых корней характеристического уравнения, поэтому для устойчивости замкнутой МСАР необходимо и достаточно, чтобы обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывал точку с координатами (0; j0). Так как обобщенный годограф Найквиста, дополненный на участке разрыва дугой бесконечно большого радиуса, не охватывает точку с координатами (0; j0) (см. рисунок 2.17 б)), то цифровая МСАР при  является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при пересекает координатные оси плоскости ближе к точке (0; j0), чем при
является устойчивой, но запасы устойчивости системы уменьшаются (обобщенный годограф Найквиста при пересекает координатные оси плоскости ближе к точке (0; j0), чем при  ).
).
Библиографический список
1. СТО ЮУрГУ 04–2008 Стандарт организации. Курсовое и дипломное проектирование. Общие требования к содержанию и оформлению / составители: Т.И. Парубочная, Н.В. Сырейщикова, В.И. Гузеев, Л.В. Винокурова. – Челябинск: Изд-во ЮУрГУ, 2008, – 56 с.
2. Автоматизированное проектирование систем автоматического управления /.А. Алексанкин, А.Е. Бржозовский, В.А. Жданов и др.; под ред. В.В. Солодовнива. – М.: Машиностроение, 1990. – 335 с.
3. Автоматизированное управление технологическими процессами: учебное пособие / Н.С. Зотов, О.В. Назаров, Б.В. Петелин, В.Б. Яковлев; под ред. В.Б. Яковлева. – Л.: Изд-во ЛГУ, 1988. – 224 с.
4. Александров, А.Г. Синтез регуляторов многомерных систем/ А.Г. Александров. – М.: Машиностроение, 1986. – 272 с.
5. Баранчук, Е.И. Взаимосвязанные и многоконтурные регулируемые системы Баранчук. – Л.: Энергия, 1968. – 267 с.
6. Барковский, В.В. Методы синтеза систем управления/ В.В. Барковский, Н., Захаров, А.С. Шаталов. – М.: Машиностроение, 1969. – 325 с.
7. Бусленко, Н.П. Лекции по теории сложных систем / Н.П. Бусленко и др. – М.: Сов. радио, 1973.
8. Васильев, В.Н. Многоуровневое управление динамическими объектами / Васильев и др. – М.: Наука, 1987.
9. Воронов, А.А. Введение в динамику сложных систем управления / – М.: Наука, 1985.
10. Зырянов, Г.В. Системы управления многосвязными объектами: учебное пособие / Г.В. Зырянов. – Челябинск: Издательский центр ЮУрГУ, 2010.
11. Катковник, В.Я. Многомерные дискретные системы управления / В.Я. Катковник, Р.А. Полуэктов. – М.: Наука, 1966. – 416 с.
12. Морозовский, В.Т. Многосвязные системы автоматического регулирования/ В.Т. Морозовский. – М.: Энергия, 1970. – 288 с.
13. Острем, К. Введение в стохастическую теорию управления/ К. Острем. – М.: Мир, 1973. – 320 с.
14. Рэй, У. Методы управления технологическими процессами / У. Рэй. – М.: 1983.
15. Соболев, О.С. Методы исследования линейных многосвязных систем – М.: Энергоатомиздат, 1985. – 464 с.
16. Чинаев, П.И. Методы анализа и синтеза многомерных автоматических систем / П.И. Чинаев. – Киев: Техника, 1969. – 377 с.
17. Янушевский, Р.Т. Теория линейных оптимальных многосвязных систем управления / Р.Т. Янушевский. – М.: Наука, 1973. – 464 с.
18. Зырянов, Г.В. Линейные дискретные системы управления / Г.В. Зырянов. – Минск: Изд-во ЮУрГУ, 2005. – 109 с.
Определение ПФ сепаратных регуляторов
Изобразим структурную схему МСАР при отсутствии перекрестных связей в многомерном управляющем устройстве и в многомерном объекте управления (Рисунок 1.1)

Рисунок 1.1 – Структурная схема МСАР при отсутствии перекрестных связей в МУУ и МОУ
Запишем передаточные матрицы с заданными числовыми значениями параметров:
 ;
;
 ;
;
 ;
;
Применяя формулы В.А. Бесекерского для типовой «симметричной» ЛАХ, выберем вид и параметры ПФ Wр1(p) и Wр2(p), обеспечивающие заданные свойства сепаратным каналам по точности (коэффициент добротности K= Ki), по быстродействию (wср) и по колебательности (M).
1) Первый сепаратный канал
Изобразим структурную схему первого сепаратного канала (Рисунок 1.2)

Рисунок 1.2 – Структурная схема первого сепаратного канала
Запишем передаточную функцию первого разомкнутого сепаратного канала:
 ; (1.1)
; (1.1)
Определим, обеспечиваются ли заданные в ТЗ свойства сепаратного канала.
Построим ЛАЧХ первого сепаратного канала. Построение проведем на масштабно-координатной бумаге.
Первая асимптота ЛАЧХ с наклоном -20 дБ/дек пересекает ось L( w) в точке 20 logK1, что соответствует требованию ТЗ по точности.
Определим частоту среза.
log wср=1.6, wcp=40 рад/с. Она близка к требуемому значению.
Построим АЧХ замкнутого сепаратного канала (Рисунок 1.3), как зависимость модуля частотной передаточной функции замкнутого канала от частоты.
Передаточная функция замкнутого канала определяется формулой
 (1.2)
(1.2)
Определим показатель колебательности М, используя формулу
 ; (1.3)
; (1.3)
где N( w) – модуль частотной передаточной функции замкнутого канала.

Свойства первого сепаратного канала по колебательности не соответствуют заданным в ТЗ.

Рисунок 1.3 – АЧХ замкнутого сепаратного канала 1
Определим передаточную функцию сепаратного регулятора.
Типовая «симметричная» ЛАХ на среднечастотном участке имеет наклоны (-40 дБ/дек; -20 дБ/дек; -40 дБ/дек). Сравнивая с заданной передаточной функцией первого сепаратного канала, определим, что желаемая передаточная функция будет иметь вид:
 . (1.4)
. (1.4)
Для оценки параметров желаемой передаточной функции воспользуемся формулами Бесекерского:
 (1.5)
(1.5)
Проведем построение желаемой ЛАЧХ на масштабно-координатной бумаге (Приложение 1а), из построения определим постоянную времени Т1 и ЛАЧХ сепаратного регулятора.
Таким образом, передаточная функция первого сепаратного регулятора, обеспечивающая заданные в ТЗ свойства первому сепаратному каналу, имеет вид:
 .
.
Передаточная функция разомкнутого сепаратного канала:
 . (1.6)
. (1.6)
Определим показатель колебательности скорректированного сепаратного канала по формуле (1.3), для этого построим АЧХ замкнутого сепаратного канала. (Рисунок 1.4)

Рисунок 1.4 – АЧХ замкнутого сепаратного канала 1 с регулятором
 .
.
Свойства сепаратного канала по точности, быстродействию и колебательности соответствуют заданным в ТЗ.
2) Второй сепаратный канал
Изобразим структурную схему второго сепаратного канала (Рисунок 1.5)

Рисунок 1.5 – Структурная схема второго сепаратного канала
Запишем передаточную функцию второго разомкнутого сепаратного канала:
 ; (1.7)
; (1.7)
Определим, обеспечиваются ли заданные в ТЗ свойства сепаратного канала.
Построим ЛАЧХ вотрого сепаратного канала. Построение проведем на масштабно-координатной бумаге (Приложение 1б).
Первая асимптота ЛАЧХ с наклоном -20 дБ/дек пересекает ось L( w) в точке 20 logK2, что соответствует требованию ТЗ по точности.
Определим частоту среза.
log wср=1.53, wcp=34 рад/с. Она близка к требуемому значению.
Построим АЧХ замкнутого сепаратного канала (Рисунок 1.6), определим показатель колебательности М, используя формулу (1.3)

Рисунок 1.6 – АЧХ замкнутого сепаратного канала 2

Свойства второго сепаратного канала по колебательности не соответствуют заданным в ТЗ.
Определим передаточную функцию второго сепаратного регулятора.
Аналогично первому сепаратному каналу, желаемая передаточная функция будет иметь вид:
 . (1.8)
. (1.8)
Для оценки параметров желаемой передаточной функции воспользуемся формулами Бесекерского (1.4).
Проведем построение желаемой ЛАЧХ на масштабно-координатной бумаге (Приложение 1б), из построения определим постоянную времени Т1 и ЛАЧХ сепаратного регулятора.
Таким образом, передаточная функция второго сепаратного регулятора, обеспечивающая заданные в ТЗ свойства второму сепаратному каналу, имеет вид:
 .
.
Передаточная функция разомкнутого сепаратного канала:
 (1.9)
(1.9)
Определим показатель колебательности скорректированного сепаратного канала по формуле (1.2), для этого построим АЧХ замкнутого сепаратного канала. (Рисунок 1.7)
 .
.
Свойства сепаратного канала по точности, быстродействию и колебательности соответствуют заданным в ТЗ.

Рисунок 1.7 – АЧХ замкнутого сепаратного канала 2 с регулятором
Последнее изменение этой страницы: 2019-10-03; Просмотров: 225; Нарушение авторского права страницы


 (1.10)
(1.10)



 (1.11)
(1.11) (1.12)
(1.12) – частотная передаточная функция замкнутого сепаратного канала.
– частотная передаточная функция замкнутого сепаратного канала. (1.13)
(1.13)
 ,
, 
 . (1.14)
. (1.14)






 имеет следующий вид:
имеет следующий вид:  ,
,  ,
,  – передаточные функции перекрестных связей в объекте управления
– передаточные функции перекрестных связей в объекте управления ,
,  .
. (1.15)
(1.15) ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 и представим определитель матрицы возвратных разностей в виде суммы действительной и мнимой части:
и представим определитель матрицы возвратных разностей в виде суммы действительной и мнимой части: 


 (1.18)
(1.18)

 (1.19)
(1.19)
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 