
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Структура электропривода с фазовой синхронизациейСтр 1 из 7Следующая ⇒
Введение
Разработка новых эффективных технологических процессов, различных машин и приборов непосредственно связана с повышением требований к лежащим в их основе электроприводам по точности, быстродействию, согласованности вращений, снижению массы и габаритов. Отсутствие высокоэффективных электроприводов сдерживает в настоящее время возможности ряда отраслей техники, поэтому разработка новых, более совершенных систем электропривода становятся актуальной задачей. Одной из основных тенденций, определяющих развитие электропривода в настоящее время, можно считать существенное усложнение выполняемых электроприводом функций и законов движения рабочих органов машин и механизмов при одновременном повышении требований к скорости и точности производимых электроприводом операций. Возросла потребность в высокоточных электроприводах сканирования, нашедших широкое применение в системах зрения современных робототехнических комплексов, авиационном приборостроении, системах наведения и стабилизации скоростей перемещения астрономических и радионавигационных приборов, различных установках космической техники. В частности актуальной является проблема разработки электроприводов для обзорно-поисковых систем, осуществляющих автоматический обзор пространства в инфракрасном диапазоне спектра с целью получения информации о расположенных в нем объектах. При построении высокоточных электроприводов, работающих в широком диапазоне регулирования частоты вращения, наиболее широкое применение нашли импульсные астатические системы электропривода с дискретным управлением. В таких системах используется принцип фазовой автоподстройки частоты вращения (ФАПЧВ), то есть осуществляется замыкание их по углу при малых рассогласованиях по угловой скорости с помощью логических устройств сравнения фаз двух последовательностей импульсов: эталонного источника и частотного датчика скорости. Электропривод, построенный на основе ФАПЧВ, обладает идеальным астатизмом по скорости, и в нем легко реализуется синфазный режим работы. Электродвигатель в системе прецизионного электропривода должен обладать высокой стабильностью и надежностью работы, малой энергоемкостью габаритами. Перспективными в этом направлении являются бесконтактные двигатели постоянного тока, которые наиболее полно удовлетворяют требованиям, предъявляемым к управляемым двигателям систем автоматики по электромеханическим и энергетическим характеристикам, массогабаритным показателям, надежности и диапазону частот вращения в приделах от единиц до сотен тысяч оборотов в минуту. В настоящие время разрабатываются системы прецизионного электропривода, с аналоговыми корректирующими устройствами, работающие на высоких частотах вращения. Это обусловлено тем, что в области высоких частот вращения частота сигнала ошибки высока и легко отфильтровывается фильтром, частота среза которого лежит за частотой среза системы. В области низких частот вращения, частота сигнал ошибки мала, и для фильтрации сигнала необходимо использовать фильтр с большой постоянной времени. В этом случае фильтр будет влиять на работу системы в целом. Поэтому в области низких частот вращения целесообразно использовать цифровое корректирующие устройство. Таким образом, целью дипломного проекта ставится разработка цифрового регулятора для электропривода с фазовой синхронизацией, работающего на низких частотах вращения. Обзор литературы
Структура электропривода с фазовой синхронизацией
Электропривод построенный на основе ФАПЧВ наиболее полно рассматривается в [1]. Структурная схема электропривода приведена на рисунке 1.1.
Рисунок 1.1 - Функциональная схема электропривода с фазовой синхронизацией.
здесьЧЗБ - частотно-задающий блок, формирующий импульсы опорной частоты fоп; ИДЧ - импульсный датчик частоты вращения, формирующий импульсы частоты обратной связи fос; ЛУС - логическое устройство сравнения, осуществляющее сравнение частот и фаз двух импульсных последовательностей fоп и fос и формирующее в линейном режиме работы электропривода импульсный сигнал γ с периодом Топ=1/fоп и длительностью, пропорциональной фазовому сдвигу импульсов частот fоп и fос, а в режимах разгона или торможения - постоянный уровень напряжения соответствующей полярности; КУ - корректирующее устройство (регулятор), необходимое для формирования корректирующего сигнала по периодическому закону; БДПТ - бесконтактный двигатель постоянного тока. Такие системы характеризуются высокими точностными показателями благодаря использованию фотоэлектрических ИДЧ с высокой разрешающей способностью, хорошими динамическими свойствами, широким диапазоном регулирования частоты вращения. Благодаря этим полезным свойствам принцип ФАПЧВ широко используется при построении прецизионных систем управления электродвигателями постоянного тока [2, 3], система синхронного-синфазного вращения и ряда других систем автоматического регулирования с высокими точностными показателями [4]. Расчет линейного регулятора
Для расчета линейного регулятора, используем модель электропривода, приведенную на рисунке 2.1 Так как в электроприводе с фазовой синхронизацией главной целью является отработка фазового рассогласования по углу поворота вала, то в качестве выходной координаты удобно принять ошибку по углу Δ α. В качестве оптимального режима, примем критический переходный процесс [1]. Преобразуем структурную схему (рисунок 1.12) к виду, показанному на рисунке 2.1.
Рисунок 2.1 - Преобразованная структурная схема электропривода с фазовой синхронизацией
В [1] в качестве регулятора предлагается использовать пропорционально-дифференциальное (форсирующее) звено с передаточной функцией:
Передаточная функция замкнутой системы с аналоговым регулятором:
Обозначим
где Перепишем (2.2) с учетом выражения (2.3):
Переходный процесс будет иметь критический характер, если корни характеристического уравнения
будут равными отрицательными. Корни характеристического уравнения (2.5):
являются равными отрицательными, если дискриминант равен нулю:
Равенство (2.7) выполняется при
Проведем анализ работы электропривода, с линейным регулятором используя модель (рисунок 2.1), реализованную в программном пакете Matlab. Структурная схема модели приведена на рисунке 2.2.
Рисунок 2.2 - Структурная схема модели электропривода с аналоговым регулятором, реализованная в MatLab
Здесь начальные условия по угловой ошибке При моделировании использовались следующие исходные данные: Z = 4800 - количество меток импульсного датчика частоты; k = 1 - коэффициент усиления корректирующего устройства.
Рисунок 2.3 - Фазовый портрет работы электропривода с аналоговым ПД-регулятором.
Рисунок 2.4 - Графики изменения ошибок по углу и скорости электропривода с аналоговым регулятором.
Выберем в качестве критерия оценки качества работы электропривода, время, в течение которого, ошибка по углу входит в интервал величиной 1% от φ 0. Это утверждение справедливо в силу того, что угловая ошибка в пропорциональном режиме работы электропривода, не может превышать величины Анализ устойчивости системы
Проведем анализ устойчивости электропривода с разработанным цифровым регулятором. Дискретная передаточная функция объекта управления [8]
Структурная схема электропривода в дискретной форме приведена на рисунке 2.11.
Рисунок 2.11 - Структурная схема электропривода в дискретной форме.
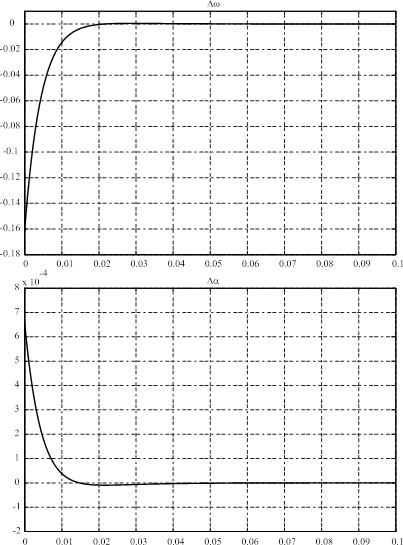
Рисунок 2.12 - Графики изменения ошибок по углу и скорости привода с цифровым регулятором после проведения параметрической оптимизации коэффициентов регулятора.
Передаточная функция замкнутой системы (рисунок 2.11)
Характеристический полином замкнутой системы
Для проведения анализа устойчивости системы воспользуемся методом билинейного преобразования, применив подстановку
в характеристическое уравнение замкнутой системы
Раскроем скобки и приведем подобные
Так как билинейное преобразование для цифровых систем является аналогом преобразования Лапласа для линейных систем, то к полученному полиному можно применить критерий Гурвица. Так как полином имеет второй порядок, то нет необходимости находить определители Гурвица. Система будет устойчива, если все коэффициенты характеристического уравнения будут положительны. В данном случае видно, что коэффициенты характеристического полинома (2.17) положительны, следовательно, система устойчива. Генератор высокой частоты В качестве генератора высокой частоты используем однокристальный генератор импульсов марки MAX038CPD [14]. Принципиальная схема генератора приведена на рисунке 3.3.
Рисунок 3.3 - Принципиальная схема генератора высокой частоты
Для получения шестнадцатиразрядного кода на выходе счетчика необходимо, чтобы на один такт квантования Топ приходилось 65536 импульсов. При величине опорной частоты
Для получения максимальной частоты необходимо, величину емкости принять минимальной, а величину сопротивления определить из выражения (3.1)
Принимая
Счетчик импульсов Схема счетчика импульсов приведена на рисунке 3.4. Здесь счетчик состоит из четырех четырехразрядных счетчиков К155ИЕ7, соединенных через входы расширения емкости. Для сброса счетчика по переднему фронту сигнала γ служат инвертирующие сумматоры DD7.1-DD8.2 и D-триггер. По переднему фронту сигнала γ на выходе триггера DD2, и соответственно на сбрасывающем входе счетчика, появляется логическая единица. Счетчик обнуляется, а на выходе сумматора DD9.1 появляется логическая единица. Сигнал с выхода сумматора поступает на сбрасывающий вход D-триггера. На выходе триггера устанавливается логический нуль, и счетчик начинает считать импульсы. Таким образом, счетчик обнуляется каждый раз по переднему фронту сигнала γ, то есть период равен Топ. Элементы DD3, DD6 - К531ЛЕ7, DD10 - К155ЛН2. Триггер DD2 - К155ТМ2 [12, 13].
Рисунок 3.4 - Принципиальная схема счетчика импульсов Регистры РЕГ1 и РЕГ2 Принципиальная схема регистров РЕГ1 иРЕГ2 приведена на рисунке 3.5 и 3.6 соответственно.
Рисунок 3.5 - Принципиальная схема регистра РЕГ1
Рисунок 3.6 - Принципиальная схема регистра РЕГ2
На рисунке 3.5 элементы DD3-DD4 восьмиразрядные параллельные регистры SN74LS574N [15]. Запись производится по переднему фронту сигнала γ, подаваемого на входы С. В схему регистра РЕГ2 дополнительно введены инверторы DD7.1 и DD9.1 - К155ЛЕ1. Благодаря этому запись в регистры производится по заднему фронту сигнала γ. Таким образом на выходе регистра РЕГ1 будет двоичное значение периода дискретизации Топ, а на выходе РЕГ2 - длительность импульса τ. Вычислительное устройство В качестве вычислительного устройства используем микроконтроллер AVR ATMega 64, представляющий собой с RISC архитектурой. Принципиальная схема приведена на рисунке 3.7. Микроконтроллер работает от встроенного тактового генератора на частоте 8 мГц. Программа для прошивки микроконтроллера на языке С приведена в Приложении А. Компиляция программы производится с помощью приложения " Code Vision" [16].
Рисунок 3.6 - Принципиальная схема вычислительного устройства
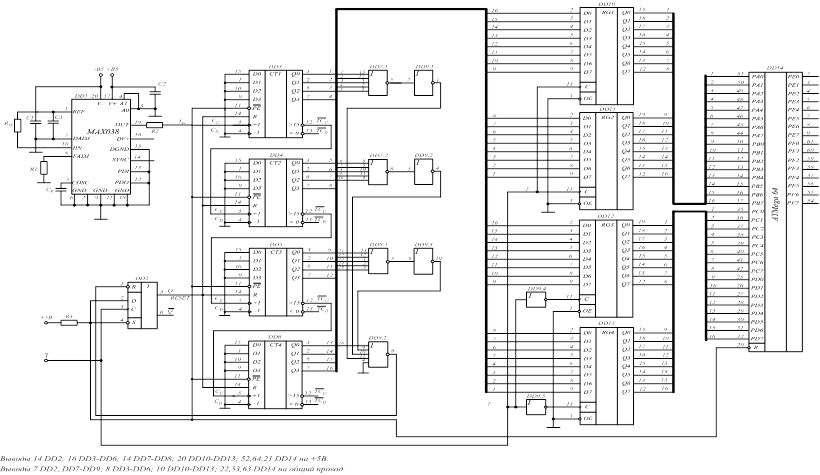
Принципиальная электрическая схема корректирующего устройства приведена на рисунке 3.7 Генератор высокой частоты DD1 вырабатывает однополярные прямоугольные импульсы стабильной частоты с постоянной скважностью, равной 2. Эти импульсы подсчитываются счетчиками DD3-DD6. Сброс счетчиков осуществляется по переднему фронту выходного сигнала ИЧФД γ. Инвертирующие сумматоры DD7.1-DD7.2, DD8.1-DD8.2 и D-триггер DD2 предназначены для сброса счетчиков по переднему фронту сигнала γ. С выхода счетчиков двоичный код поступает на входы параллельных регистров DD10-DD13. Регистры DD10, DD11 по переднему фронту сигнала γ передают двоичное значение периода дискретизации на выход микроконтроллера DD14. Регистры DD12, DD13 по заднему фронту сигнала γ передают двоичное значение длительности импульса τ на выход микроконтроллера DD14. Микроконтроллер DD14 осуществляет вычисление корректирующего сигнала по прерыванию по входам, т.е. только при изменении сигнала на входах PA0- PA7, PB0- PB7, PC0- PC7, PD0- PD7. С выходов PE0- PE7, PF0- PF7 DD13 двоичное значение сигнала управления поступает на вход системы управления БДПТ. Спецификация элементов принципиальной схемы приведена в Приложении Б
Рисунок 3.7 - Принципиальная электрическая схема корректирующего устройства Экономический расчет
Затраты на проектирование цифрового регулятора для электропривода с фазовой синхронизацией определяются по формуле:
где Сосн, зп - основная заработная плата персонала, руб.; Сдоп, зп - дополнительная заработная плата персонала, руб.; Сф, о - фондовые отчисления, руб.; Спо - затраты на приобретение программного обеспечения, руб.; Свт - затраты на содержание и эксплуатацию вычислительной техники, руб.; Сн - накладные расходы, руб. Основная заработная плата рассчитывается как:
где Тразраб - время необходимое для разработки регулятора, ч; З - основная заработная плата персонала за один час, руб. /ч. Для разработки цифрового регулятора необходимо Тразраб=150 ч. Исполнителем является инженер. Оклад инженера третьей категории составляет 800 руб. в месяц. При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, основная заработная плата за 1 ч составит:
Основная заработная плата инженера-программиста за весь период разработки в соответствии с выражением (1.2) составит:
Дополнительная заработная плата рассчитывается в процентах от основной заработной платы и составляет 12%. Дополнительная заработная плата инженера-программиста за весь период разработки составит:
Фондовые отчисления берутся в размере 36, 6% от суммы основной и дополнительной заработной платы. Фондовые отчисления за весь период разработки и реализации модели составят:
Затраты на приобретение программного обеспечения берутся как стоимость программного обеспечения. Стоимость полного пакета MatLab 7, в которой производится проектирование, 52500 руб. Следовательно затраты на приобретение программного обеспечения составят:
Спо=52500 руб.
Затраты на содержание и эксплуатацию вычислительного комплекса определяются следующим образом:
где см-ч - стоимость машино-часа, руб. /ч. Стоимость машино-часа:
где Сэл, эн - стоимость потребляемой в год электроэнергии, руб.; А - амортизация в год, руб.; Срем - затраты на ремонт в год, руб.; Твт - действительный фонд времени работы вычислительной техники, ч. Стоимость потребляемой в год электроэнергии:
где р - мощность, потребляемая из сети одной ЭВМ, кВт; Тном - номинальный фонд времени работы ЭВМ в год, ч; сэ - стоимость 1 кВт/ч электрической энергии, руб. / (кВт∙ ч). Мощность, потребляемая из сети одной ЭВМ, р=0, 25 кВт. Стоимость 1 кВт∙ ч электрической энергии сэ=1, 2 руб. / (кВт∙ ч). При условии, что продолжительность рабочего дня равна 8 ч, а в месяце 22 рабочих дня, номинальный фонд времени работы ЭВМ равен:
Tном=8∙ 22∙ 12=2112 ч.
За год отчисления на электрическую энергию составят:
Амортизация вычислительной техники считается как 25% от ее балансовой стоимости. Стоимость ЭВМ, необходимой для работы - 15000 руб. Амортизация вычислительной техники за год составит:
Затраты на ремонт в год считаются как 4% от стоимости ЭВМ и составляют:
Действительный фонд времени работы ЭВМ в год рассчитывается как:
где Тном - номинальный годовой фонд времени работы ЭВМ, ч; Тпроф - годовые затраты времени на профилактические работы (принимаются 10% от Тном), ч. Действительный фонд времени работы ЭВМ по выражению (1.6):
Стоимость машино-часа по выражению (1.4):
Затраты на содержание и эксплуатацию ЭВМ по выражению (1.3):
Накладные расходы рассчитываются как 30% от основной заработной платы и составляют:
Смета затрат на разработку и моделирование приведена в таблице 4.1. Таблица 4.1 - Сводная смета затрат.
Охрана труда Микроклимат На состояние человеческого организма большое влияние оказывает микроклимат в помещении. В соответствии с ГОСТ 12.1.005-88 [15] микроклимат помещения - это климат внутренней среды этого помещения, который определяется действующими на организм человека сочетаниями температуры, влажности и скорости движения воздуха, а также температуры окружающих поверхностей. Гигиенические требования к показателям микроклимата производственных помещений приведены в ГОСТ 12.1.005-88 [15]. Соотношения температуры и относительной влажности неподвижного (при скорости движения - не более 0, 1 м/с) воздуха, оказывающие одинаковое тепловое воздействие, приведены в таблице 6.1. Таблица 6.1 - Оптимальные соотношения температуры и относительной влажности воздуха
Оптимальные и допустимые параметры микроклимата на рабочих местах (категория работы легкая (Ι а)), в соответствии с ГОСТ 12.1.005-88 [15], приведены в таблице 6.2. Таблица 6.2 - Оптимальные и допустимые параметры микроклимата
Мероприятия по оптимизации микроклимата лаборатории следует проводить в соответствии с СанПиН 2.2.2.542-96 [17]. Помещения с ЭВМ перед началом и после каждого академического часа учебных занятий должны быть проветрены, что обеспечивает улучшение качественного состава воздуха, в том числе и аэроионный режим. Отделка помещений предусматривает влажную уборку. Поверхности стен помещения, окон и т.д. должны быть гладкими и покрыты масляной краской светлых тонов. В случае необходимости, при повышенной температуре окружающего воздуха в теплое время года, необходимо применять вентиляцию, кондиционирование воздуха, теплозащитные экраны, а при пониженной температуре окружающего воздуха в холодное время года необходимо установить воздушные завесы, дополнительные обогревательные приборы с учетом всех мер противопожарной безопасности. Для повышения влажности воздуха в помещениях с ЭВМ рекомендуется применять увлажнители воздуха, а для понижения влажности - естественную и искусственную вентиляцию, кондиционирование. Освещение Согласно СанПиН 2.2.2.542-96 [17], помещения с ЭВМ должны иметь естественное и искусственное освещение. Естественное освещение должно осуществляться через светопроемы, ориентированные преимущественно на север и северо-восток, и обеспечивать коэффициент естественной освещенности (КЕО) не ниже 1.2% в зонах с устойчивым снежным покровом и не ниже 1.5% на остальной территории. В таблице 6.3 приведены нормы проектирования естественного, совмещенного и искусственного освещения для третьего разряда зрительной работы по СНиП 23.05-95 [18]. Таблица 6.3 - Нормы проектирования естественного, совмещенного и искусственного освещения
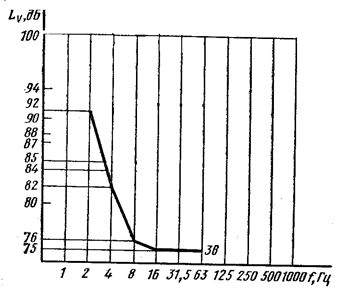
Следует ограничивать прямую блесткость от источников освещения, при этом яркость светящихся поверхностей (окна, светильники и др.), находящихся в поле зрения, должна быть не более 200 кд/кв. м. Также следует ограничивать отраженную блесткость на рабочих поверхностях (экран, стол, клавиатура и др.) за счет правильного выбора типов светильников и расположения рабочих мест по отношению к источникам естественного и искусственного освещения. Существует несколько разновидностей источников искусственного света, но газоразрядные лампы имеют ряд преимуществ. Световая отдача их достигает 50-100 лм/Вт, срок службы до 10000 ч, нагреваются лампы до 30-60°С, яркость их составляет 5000-7000 кд/м2, возможно получить световое излучение практически любой части спектра. Самым простым способом устранения стробоскопического эффекта является использование двухламповых светильников с емкостным и индуктивным балластами. Общее освещение следует выполнять в виде сплошных или прерывистых линий светильников, расположенных сбоку от рабочих мест, параллельно линии зрения пользователя при рядном расположении ЭВМ. При периметральном расположении компьютеров линии светильников должны располагаться локализовано над рабочим столом ближе к его переднему краю, обращенному к оператору. Шум Источником шума в рассматриваемой лаборатории являются механические устройства ЭВМ и периферийное оборудование (колеблющиеся твердые части, к которым можно отнести системы вентиляции оборудования, дисководы, каретки и приводы принтеров). Нормируемые параметры шума на рабочих местах определены ГОСТ 12.1.003-83 [19] и СН 2.2.4/2.1.8.562-96 [20] и приведены в таблице 6.4 и на рисунке 6.2. Согласно СанПиН 2.2.2.542-96 [17], при выполнении основной работы на ЭВМ (диспетчерские, операторские, расчетные кабины и посты управления, залы вычислительной техники и др.), уровень шума на рабочем месте не должен превышать 60 дБА. Производственные помещения, в которых для работы используются преимущественно ЭВМ и учебные помещения (аудитории вычислительной техники, дисплейные классы, кабинеты и др.), не должны граничить с помещениями, в которых уровни шума превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.). Шумящее оборудование (АЦПУ, принтеры и т.п.), уровни шума которого превышают нормированные, должно находиться вне помещения с ВДТ и ПЭВМ.
Рисунок 6.2 - Нормирование шума по предельному спектру Таблица 6.4 - Нормируемые параметры шума на рабочих местах
Снизить уровень шума в помещениях с ВДТ и ПЭВМ можно использованием звукопоглощающих материалов с максимальными коэффициентами звукопоглощения в области частот 63 - 8000 Гц для отделки помещений, подтвержденных специальными акустическими расчетами. Дополнительным звукопоглощением служат однотонные занавеси из плотной ткани, гармонирующие с окраской стен и подвешенные в складку на расстоянии 15-20 см от ограждения. Вибрация Нормируемые параметры вибрации на рабочих местах определены СН 2.2.4/2.1.8.566-96 [21] и ГОСТ 12.1.012-90 [22] и приведены в таблице 6.5 и на рисунке 6.3. Мерами борьбы с вибрацией служат: снижение вибраций в источнике, отстройка от режима резонанса, вибродемпфирование, динамическое гашение. Согласно СанПиН 2.2.2.542-96 [17] производственные помещения, в которых для работы используются преимущественно ЭВМ и учебные помещения (аудитории вычислительной техники, дисплейные классы, кабинеты и др.), не должны граничить с помещениями, в которых уровни вибрации превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.).
Рисунок 6.3 - Гигиенические нормы вибраций в лаборатории ЭВМ Таблица 6.5 - Допустимые нормы вибрации на рабочих местах с ЭВМ
Электробезопасность В отношении электробезопасности лаборатория должна соответствовать ГОСТ 12.2.007.0-75 [23]. В лаборатории имеется электрооборудование (2 ЭВМ, сканнер, принтер, осциллограф, электрочайник и др.) суммарной мощностью не более 4 кВт. Все электрооборудование лаборатории относится к установкам напряжением до 1000 В. По степени поражения электрическим током - к классу " без повышенной опасности" (сухое, влажность в помещении не превышает 60%, нет возможности одновременного прикосновения к корпусам электрического оборудования, а также к заземленным частям, температура воздуха не превышает 35оС). В помещении лаборатории основными техническими средствами, обеспечивающими безопасность работ, являются: обеспечение недоступности токоведущих частей; защитное заземление; защитное отключение. Заземлению подлежат корпуса ЭВМ и иных приборов, металлические оболочки кабелей и проводов. Для участка персональных компьютеров наиболее приемлемым вариантом является защитное заземление, т.к. корпуса компьютеров и периферии обычно выполнены не из токопроводящих материалов, а также имеются специальные клеммы для подключения заземления. Для электроустановок с напряжением до 1000 В сопротивление заземляющего устройства должно быть не более 4 Ом. Обеспечение недоступности токоведущих частей достигается изолированием токоведущих кабелей и проводов. ГОСТ 12.2.007.0-75 [23] устанавливает предельно допустимые уровни напряжений прикосновения и токов, протекающих через тело человека (таблица 6.6). Источниками электростатического поля на рабочем месте оператора ЭВМ являются дисплей и периферийные устройства. Для ограничения вредного воздействия электростатического поля проводится его нормирование (таблица 6.7). Таблица 6.6 - Предельно допустимые уровни напряжений прикосновения и токов
Таблица 6.7 - Предельно допустимый уровень напряжённости электростатического поля
Основным способом защиты от статического электричества является заземление периферийного оборудования, а также увлажнение окружающего воздуха. Электромагнитное излучение Уровни электромагнитного излучения (ЭМИ) в лаборатории должны соответствовать ГОСТ 12.1.006-84 [24]. На живой организм влияют как искусственные (мониторы ЭВМ, ЭЛТ осциллографа, трансформаторы, антенны и т.д.), так и естественные ЭМИ (радиоизлучения солнца, магнитное поле земли и т.д.). Допустимые значения параметров неионизирующих электромагнитных излучений представлены в таблице 6.8. Основными способами защиты от воздействия ЭМИ являются: уменьшение интенсивности облучения от самого источника, экранирование источника излучения, экранирование рабочего места, применение средств индивидуальной защиты. Таблица 6.8 - Допустимые значения параметров неионизирующих ЭМИ |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-03; Просмотров: 213; Нарушение авторского права страницы


 . (2.1)
. (2.1)
 . (2.2)
. (2.2) , (2.3)
, (2.3) - добротность электропривода по ускорению [1].
- добротность электропривода по ускорению [1]. . (2.4)
. (2.4) (2.5)
(2.5) ; (2.6)
; (2.6) . (2.7)
. (2.7) . (2.8)
. (2.8)
 ; по частоте вращения
; по частоте вращения  ; где
; где  - максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода [1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу
- максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода [1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу  и скорости
и скорости  приведены на рисунке 2.4.
приведены на рисунке 2.4. (рад/с2) - максимальное угловое ускорение электродвигателя;
(рад/с2) - максимальное угловое ускорение электродвигателя;  (рад) - угловое расстояние между метками импульсного датчика частоты;
(рад) - угловое расстояние между метками импульсного датчика частоты; 
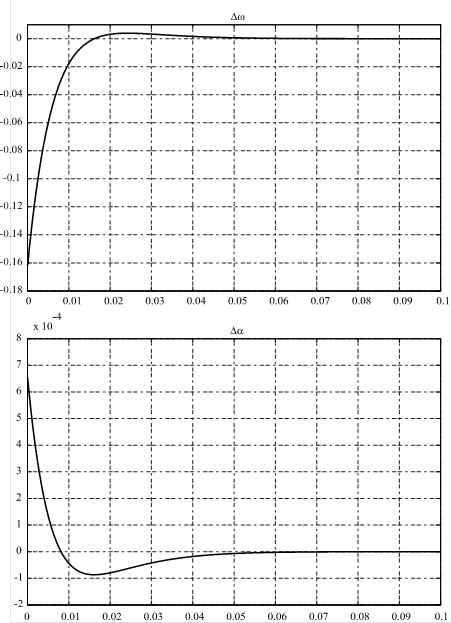
 . Из графика (рисунок 2.4) - время регулирования
. Из графика (рисунок 2.4) - время регулирования  .
. . (2.11)
. (2.11)


 . (2.12)
. (2.12) =0. (2.13)
=0. (2.13) , (2.14)
, (2.14) . (2.15)
. (2.15) , (2.16)
, (2.16) . (2.17)
. (2.17)
 =1 кГц., выходная частота генератора должна быть 65, 536 мГц. Частота генератора зависит от величин емкости
=1 кГц., выходная частота генератора должна быть 65, 536 мГц. Частота генератора зависит от величин емкости  и сопротивления
и сопротивления  [14] и определяется как
[14] и определяется как (3.1)
(3.1) . (3.2)
. (3.2) (Ф), по выражению (3.2):
(Ф), по выражению (3.2):  (Ом).
(Ом).



 , (1.1)
, (1.1) , (1.2)
, (1.2) руб. /ч.
руб. /ч. руб.
руб. руб.
руб. руб.
руб. , (1.3)
, (1.3) , (1.4)
, (1.4) , (1.5)
, (1.5) руб.
руб. руб.
руб. руб.
руб. , (1.6)
, (1.6) ч.
ч. руб. /ч.
руб. /ч. руб.
руб. руб.
руб.
 = 60;
от 1 до 9 часов,
= 60;
от 1 до 9 часов,  = (
= (  ).
).