
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Синтез передаточной функции цифрового регулятора
Аппроксимируем передаточную функцию регулятора заменой операции дифференцирования на первую разность
где Обозначим:
С учетом выражений (2.10) дискретная передаточная функция регулятора:
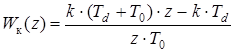
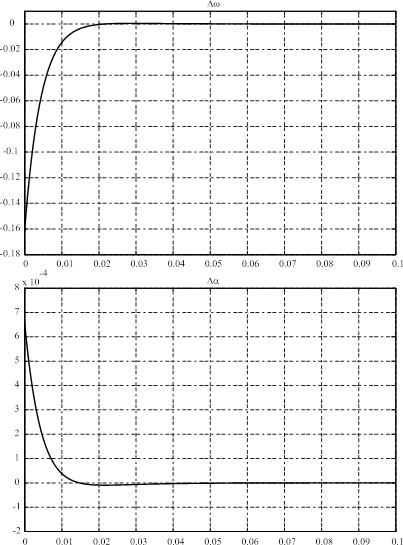
Период дискретизации Структурная схема электропривода с цифровым регулятором приведена на рисунке 2.6. Фазовый портрет работы электропривода, а так же графики изменения ошибок по углу При моделировании использовались те же исходные данные, что и с аналоговым регулятором и период квантования Это соответствует частоте исследования опорных импульсов
Рисунок 2.5 - Фазовый портрет работы электропривода с цифровым регулятором.
Рисунок 2.6 - Структурная схема модели электропривода с цифровым регулятором, реализованная в MatLab
Рисунок 2.7 - Графики изменения ошибок по углу и скорости электропривода с цифровым регулятором. Проведение параметрической оптимизации коэффициентов цифрового регулятора
Из теории автоматического управления известно, что любая цифровая система является лишь приближением аналоговой и ее поведение стремится к поведению аналоговой системы с некоторой степенью точности. Однако в [8] указывается, что при больших тактах квантования у цифровых систем проявляется свойства, отличные от свойств аналоговых. То есть при аппроксимации линейного регулятора с относительно большим тактом квантования, можно получить цифровой регулятор с оптимизацией параметров которого можно добиться переходный процесс с меньшими Для проведения параметрической оптимизации коэффициентов регулятора был применен метод проб и ошибок [8]. Данный метод заключается в последовательном изменении, значений параметров регулятора от малых начальных значений до тех пор, пока процесс в замкнутой системе не приобретет значительной колебательности. После этого следует понемногу уменьшать значения параметров. Использование данного метода обосновано простотой моделирования процессов в электроприводе на ЭВМ. В результате оптимизации выяснилось следующее: при изменении коэффициентов q0 и q1 в числителе передаточной функции регулятора система становится неустойчивой, что проявляется в монотонном нарастании ошибки по углу и скорости; при изменении коэффициента q2 в знаменателе от 50 до 120% от рассчитанного значения, характер переходного процесса изменяется от апериодического к колебательному. В качестве критериев оптимизации выступает время регулирования
где: М - число тактов квантования, на рассматриваемом участке. Результаты моделирования при изменении коэффициента q2 от 50 до 120% сведены в таблице 2.1 Графики зависимости времени регулирования и среднего квадрата ошибки от коэффициента q2 приведены на рисунках 2.8 и 2.9 соответственно. Таблица 2.1 - Зависимости времени регулирования tр и среднего квадрата ошибки
Рисунок 2.8 - График зависимости среднего квадрата ошибки
Рисунок 2.9 - График зависимости времени регулирования tр от коэффициента q2.
Из полученных графиков видно, что оптимальный режим работы электропривода обеспечивается при 0, 82q2. При этом время регулирования равно Графики переходного процесса по
Рисунок 2.10 - Фазовый портрет работы электропривода с цифровым регулятором после проведения параметрической оптимизации. Анализ устойчивости системы
Проведем анализ устойчивости электропривода с разработанным цифровым регулятором. Дискретная передаточная функция объекта управления [8]
Структурная схема электропривода в дискретной форме приведена на рисунке 2.11.
Рисунок 2.11 - Структурная схема электропривода в дискретной форме.
Рисунок 2.12 - Графики изменения ошибок по углу и скорости привода с цифровым регулятором после проведения параметрической оптимизации коэффициентов регулятора.
Передаточная функция замкнутой системы (рисунок 2.11)
Характеристический полином замкнутой системы
Для проведения анализа устойчивости системы воспользуемся методом билинейного преобразования, применив подстановку
в характеристическое уравнение замкнутой системы
Раскроем скобки и приведем подобные
Так как билинейное преобразование для цифровых систем является аналогом преобразования Лапласа для линейных систем, то к полученному полиному можно применить критерий Гурвица. Так как полином имеет второй порядок, то нет необходимости находить определители Гурвица. Система будет устойчива, если все коэффициенты характеристического уравнения будут положительны. В данном случае видно, что коэффициенты характеристического полинома (2.17) положительны, следовательно, система устойчива. |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 176; Нарушение авторского права страницы
 :
:  ;
;  ;
;  . (2.9)
. (2.9) - период дискретизации.
- период дискретизации.
 ; (2.10)
; (2.10) .
. .
. принимаем равным периоду следования импульсов опорной частоты Топ.
принимаем равным периоду следования импульсов опорной частоты Топ. и скорости
и скорости  , с цифровым регулятором приведены на рисунках 2.5 и 2.7 соответственно.
, с цифровым регулятором приведены на рисунках 2.5 и 2.7 соответственно. =10-3 (с).
=10-3 (с). (Гц).
(Гц).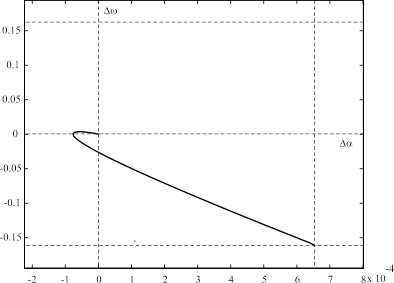


 и σ.
и σ. и средний квадрат ошибки управления
и средний квадрат ошибки управления . (2.10)
. (2.10) от параметра q2.
от параметра q2. , %
, %

 от коэффициента q2.
от коэффициента q2.
 (с), средний квадрат ошибки
(с), средний квадрат ошибки  .
. , а так же фазовый портрет работы электропривода после оптимизации коэффициентов приведены на рисунках 2.10 и 2.12 соответственно.
, а так же фазовый портрет работы электропривода после оптимизации коэффициентов приведены на рисунках 2.10 и 2.12 соответственно.
 . (2.11)
. (2.11)


 . (2.12)
. (2.12) =0. (2.13)
=0. (2.13) , (2.14)
, (2.14) . (2.15)
. (2.15) , (2.16)
, (2.16) . (2.17)
. (2.17)