
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основы теории цифровых систем управления
В цифровых системах автоматического управления осуществляется квантование сигналов по времени и уровню (преобразование непрерывного в дискретные через равные промежутки времени, но при этом выделяется ближайший уровень непрерывного сигнала). Квантование по времени делает всю систему управления дискретной (рисунок 1.14), а по уровню нелинейной. Разрядная сетка современных ЭВМ такова, что влиянием квантования по уровню можно пренебречь. Это делает всю систему линейной и позволяет использовать для ее расчета математический аппарат исследования импульсных систем. Цифровой сигнал, отражающий преобразованный непрерывный сигнал в дискретный, представляет собой двоичное число - совокупность логических нулей и единиц. При исследовании цифровых систем автоматического управления этот реальный сигнал заменяют его математической абстракцией - решетчатой функцией.
Рисунок 1.14 - График квантования сигнала по времени
Понятие решетчатой функции лежит в основе математического описания дискретных систем и позволяет осуществлять переход к дискретному аналогу дифференциальных уравнений - разностным уравнением (уравнения в конечных разностях). Эти уравнения, определяющие связь между значениями решетчатой функции с помощью конечных разностей, являются аналогами производных в дифференциальных уравнениях [8]. Первая прямая разность:
получается путем вычитания из последующего значения решетчатой функции (будущего) текущего значения. Первая обратная разность:
получается путем вычитания из текущего значения предыдущего. Первая разность является аналогом первой производной непрерывной функции. Для решения разностных уравнений широко применяется Z-преобразование, оно вытекает из дискретного преобразования Лапласа решетчатых функций. Преобразование Лапласа
Дискретное преобразование Лапласа для решетчатых функций
Z-преобразование решетчатой функции
где n = 0, 1, 2, ….
Таким образом, решетчатая исходная функция заменяется ее изображением (Z-преобразованием). Переход от оригинала к изображению позволяет заменить решение разностных уравнений - решением алгебраических. Выбор структуры и расчет параметров регулятора
В литературе [8] приводятся примеры аппроксимации линейных регуляторов заменой операции дифференцирования на первую разность. При этом имеется возможность использовать накопленный опыт работы с аналоговыми регуляторами и применять известные правила настройки регуляторов. Для определения структуры цифрового КУ аппроксимируем передаточную функцию аналогового регулятора, настроенного на оптимальную работу. Исследуем влияние изменения коэффициентов регулятора, на качество управления и характер переходного процесса, и определим значения коэффициентов, при которых обеспечиваются наилучшие динамические характеристики электропривода. Так же ставится задача исследования устойчивости электропривода с разработанным регулятором. Расчет линейного регулятора
Для расчета линейного регулятора, используем модель электропривода, приведенную на рисунке 2.1 Так как в электроприводе с фазовой синхронизацией главной целью является отработка фазового рассогласования по углу поворота вала, то в качестве выходной координаты удобно принять ошибку по углу Δ α. В качестве оптимального режима, примем критический переходный процесс [1]. Преобразуем структурную схему (рисунок 1.12) к виду, показанному на рисунке 2.1.
Рисунок 2.1 - Преобразованная структурная схема электропривода с фазовой синхронизацией
В [1] в качестве регулятора предлагается использовать пропорционально-дифференциальное (форсирующее) звено с передаточной функцией:
Передаточная функция замкнутой системы с аналоговым регулятором:
Обозначим
где Перепишем (2.2) с учетом выражения (2.3):
Переходный процесс будет иметь критический характер, если корни характеристического уравнения
будут равными отрицательными. Корни характеристического уравнения (2.5):
являются равными отрицательными, если дискриминант равен нулю:
Равенство (2.7) выполняется при
Проведем анализ работы электропривода, с линейным регулятором используя модель (рисунок 2.1), реализованную в программном пакете Matlab. Структурная схема модели приведена на рисунке 2.2.
Рисунок 2.2 - Структурная схема модели электропривода с аналоговым регулятором, реализованная в MatLab
Здесь начальные условия по угловой ошибке При моделировании использовались следующие исходные данные: Z = 4800 - количество меток импульсного датчика частоты; k = 1 - коэффициент усиления корректирующего устройства.
Рисунок 2.3 - Фазовый портрет работы электропривода с аналоговым ПД-регулятором.
Рисунок 2.4 - Графики изменения ошибок по углу и скорости электропривода с аналоговым регулятором.
Выберем в качестве критерия оценки качества работы электропривода, время, в течение которого, ошибка по углу входит в интервал величиной 1% от φ 0. Это утверждение справедливо в силу того, что угловая ошибка в пропорциональном режиме работы электропривода, не может превышать величины |
Последнее изменение этой страницы: 2019-10-03; Просмотров: 195; Нарушение авторского права страницы

 (1.2)
(1.2) (1.3)
(1.3) . (1.4)
. (1.4) . (1.5)
. (1.5) , (1.6)
, (1.6) ,
,  .
.
 . (2.1)
. (2.1)
 . (2.2)
. (2.2) , (2.3)
, (2.3) - добротность электропривода по ускорению [1].
- добротность электропривода по ускорению [1]. . (2.4)
. (2.4) (2.5)
(2.5) ; (2.6)
; (2.6) . (2.7)
. (2.7) . (2.8)
. (2.8)
 ; по частоте вращения
; по частоте вращения  ; где
; где  - максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода [1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу
- максимальное перерегулирование по угловой скорости в пропорциональном режиме работы электропривода [1]. Фазовый портрет работы электропривода с аналоговым регулятором представлен на рисунке 2.3, диаграммы изменения ошибок по углу  и скорости
и скорости  приведены на рисунке 2.4.
приведены на рисунке 2.4. (рад/с2) - максимальное угловое ускорение электродвигателя;
(рад/с2) - максимальное угловое ускорение электродвигателя;  (рад) - угловое расстояние между метками импульсного датчика частоты;
(рад) - угловое расстояние между метками импульсного датчика частоты; 
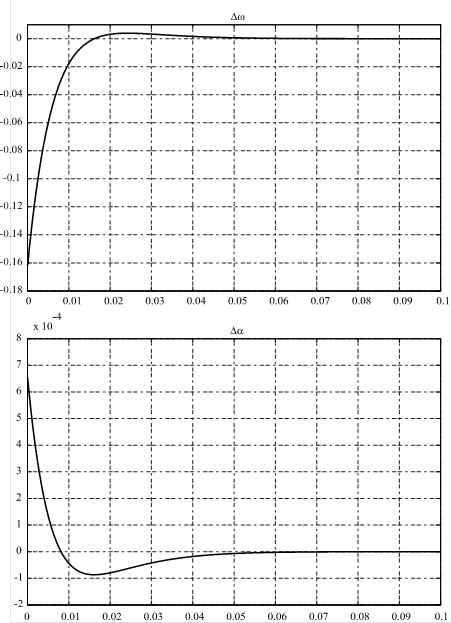
 . Из графика (рисунок 2.4) - время регулирования
. Из графика (рисунок 2.4) - время регулирования  .
.