|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Проектируемого двигателя переменного тока
Наружный диаметр статора Dа принимают в зависимости от выбранной высоты оси вращения. Приведенные в справочных таблицах наружные диаметры статоров для каждой из h нормализированы и соответствуют, например, данным серии асинхронных машин 4А. В процессе проектирования новых машин они могут быть изменены, однако при выбранном значении h изменение Da в меньшую сторону нецелесообразно, так как при этом возрастут электромагнитные нагрузки. Увеличение Da при той же h требует тщательной конструкторской и технологической проработки, доказывающей возможность такого изменения. Внутренний диаметр статора D в общем случае может быть определен по наружному диаметру, высотам ярма и зубцов статора:
где hz – расчетная высота зубца паза, мм. На данном этапе расчета размеры ha и hz неизвестны. Поэтому для определения D используют эмпирические зависимости, основанные на следующем. При одном и том же уровне индукции на участках магнитопровода в машинах с одинаковым D высота ярма статора будет пропорциональна потоку, а следовательно, обратно пропорциональна числу полюсов машины (прямо пропорциональна полюсному делению), что дает возможность для моделирования этих параметров. Сечение эффективных проводников – qэф1, определяют, исходя из тока одной параллельной ветви и допустимой плотности тока в обмотке:
где I1н – ток одной параллельной ветви, А; J1 – допустимая плотность тока в обмотке, А/мм2; а – число параллельных ветвей эффективных проводников. С точки зрения повышения использования активных материалов плотность тока J1 должна быть выбрана как можно большей, но при этом возрастают потери в меди обмотки. Увеличение потерь сказывается, во-первых, на повышении температуры обмотки и, во-вторых, на КПД двигателя. В асинхронных двигателях общего назначения при принятой в них системе косвенного охлаждения влияние плотности тока на нагрев обмотки более существенно, чем на КПД. На этом основании определены качественные зависимости допустимой плотности тока в обмотках различных машин. Она повышается с уменьшением габаритов машины, с увеличением допустимого нагрева обмотки при переходе на другой, более высокий класс нагревостойкости изоляции и с повышением интенсивности охлаждения (например, в машинах защищенного исполнения по сравнению с закрытыми обдуваемыми двигателями). Нагрев пазовой части обмотки зависит от произведения линейной нагрузки на плотность тока (AJ). Поэтому выбор допустимой плотности тока производят с учетом линейной нагрузки двигателя:
Правильный выбор воздушного зазора δ также во многом определяет энергетические показатели асинхронного двигателя. Чем меньше воздушный зазор, тем меньше его магнитное сопротивление и магнитное напряжение, составляющее основную часть суммарной магнитодвижущей силы (МДС) магнитной цепи всей машины. Поэтому уменьшение зазора приводит к соответственному уменьшению МДС магнитной цепи и намагничивающего тока двигателя, благодаря чему возрастает его cosφ и уменьшаются потери в меди обмотки статора. Но чрезмерное уменьшение δ приводит к возрастанию амплитуд пульсаций индукции в воздушном зазоре и, как следствие этого, к увеличению поверхностных и пульсационных потерь. Поэтому КПД двигателей с очень малыми зазорами не улучшается, а часто даже становится меньше. В современных асинхронных двигателях зазор выбирают, исходя из минимума суммарных потерь. Так как при увеличении зазора потери в меди возрастают, а поверхностные и пульсационные уменьшаются, то существует оптимальное соотношение между параметрами, при котором сумма потерь будет наименьшей. Такие расчеты проводят на ЭВМ по оптимизационным программам. При учебном проектировании величину воздушного зазора следует выбирать, руководствуясь данными выпускаемых двигателей либо следующими приближенными формулами. Зависимость воздушного зазора от внутреннего диаметра статора у двигателей серии 4А приведена на рис.4.14. Поверхностные и пульсационные потери в двигателях зависят не только от амплитуд, но и от частоты пульсаций индукции в воздушном зазоре. В быстроходных двигателях частота пульсаций больше, чем в тихоходных, так как она пропорциональна частоте вращения. Для уменьшения этого вида потерь δ в быстроходных двигателях выполняют большим, что уменьшает амплитуду пульсаций. В крупных высоковольтных двигателях воздушный зазор также выполняют большим, обычно 1, 5 – 2, 0 мм. В высоковольтных машинах применяют только открытые пазы на статоре и при малых зазорах это может привести к большим пульсациям индукции. Воздушный зазор, полученный по эмпирическим формулам или из графиков, следует округлять до 0, 05 мм при δ < 0, 5 мм и до 0, 1 мм при δ > 0, 5 мм. Например, зазор выбирают равным 0, 35; 0, 4; 0, 45; 0, 5; 0, 6 мм и т.д.
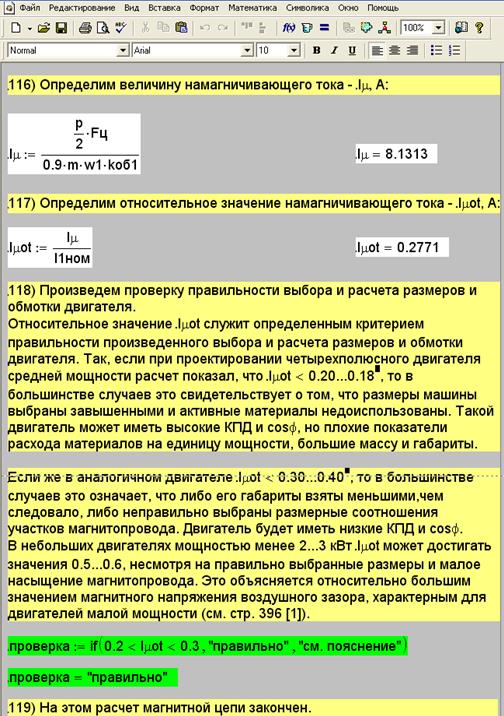
Рис. 4.14. К моделированию воздушного зазора Выбранный по приведенным рекомендациям воздушный зазор, как правило, превышает минимально допустимый по механическим условиям. Однако все же необходимо провести механический расчет вала проектируемого двигателя. Прогиб вала не должен быть больше 10% воздушного зазора. При любой конфигурации паза уменьшение ширины верхней части стержней и увеличение их высоты приводят к увеличению пускового момента, но одновременно увеличивается коэффициент магнитной проводимости паза и растет индуктивное сопротивление обмотки ротора. Это в некоторых случаях может играть положительную роль – как фактор, ограничивающий пусковые токи, но в то же время увеличение индуктивного сопротивления ротора приводит к ухудшению коэффициента мощности при номинальном режиме работы и к снижению величины максимального момента Мmax. То же характерно для двигателей с двухклеточными роторами, имеющими большие пусковые моменты, но низкие коэффициенты мощности при номинальном режиме, так как поток пазового рассеяния в перемычке между стержнями рабочей и пусковой клеток достигает больших значений. Поэтому для обеспечения высоких энергетических показателей номинального режима следует прежде всего ориентироваться на пазы ротора с широкой верхней частью – грушевидные. Пазы других форм (прямоугольные, фигурные) или двойную клетку применяют только в тех случаях, когда пусковые характеристики двигателя с ротором, имеющим грушевидные пазы, не удовлетворяют требованиям, поставленным в техническом задании. Для расчета размеров трапецеидальных сужающихся в верхней части пазов целесообразно использовать графоаналитический метод, который был использован при разработки программы. В большинстве двигателей с высотой оси вращения h ≥ 250 мм выполняют аксиальные каналы с целью некоторого улучшения условий охлаждения ротора и снижения его массы и момента инерции. В двигателях серии 4А при h = 250 мм аксиальные каналы располагают в одном ряду, их число mк2 =10, а диаметр dк2 = 15 ÷ 30 мм. В двигателях с высотой оси вращения h = 280 ÷ 355 мм в одном ряду располагают 12 каналов диаметром dк2 = 20 ÷ 30 мм. В двигателях с h > 355 мм число каналов уменьшают до 9, а диаметр увеличивают до 55 – 100 мм. Во всех перечисленных примерах большие значения dк2 относятся к двигателям с большим числом 2р. Аксиальные каналы могут быть расположены в одном ряду или при больших диаметрах ротора в двух рядах. Радиальные каналы в сердечнике ротора, так же как и в статоре, выполняются лишь при длине сердечника, превышающей 0, 25 – 0, 3 м. В таких роторах необходимо предусматривать выполнение также и аксиальных каналов, которые служат для прохода охлаждающего воздуха к радиальным каналам. Наличие каналов, их диаметр и расположение оказывают влияние на магнитное напряжение ярма ротора и должны быть учтены при расчете магнитной цепи. При расчете магнитной цепи проектируемого двигателе необходимо особое внимание уделить правильному определению величины намагничивающего тока. Он определяется по следующей зависимости:
где Fц – суммарное магнитное напряжение магнитной цепи машины (на пару полюсов), А; w1 – число витков в фазе обмотки; m1 – число фаз (задается в задании на проектирование); kоб1 – величина обмоточного коэффициента. Намагничивающий ток выражается также в процентах или долях номинального тока:
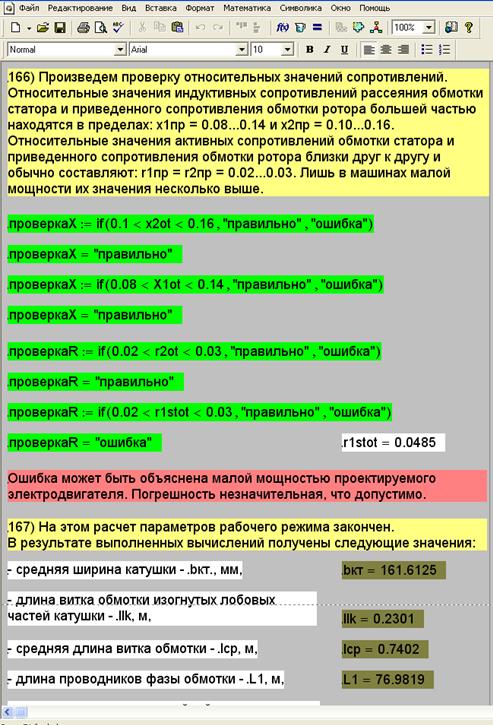
где I1н – номинальный ток обмотки статора, А. Относительное значение Такой двигатель может иметь высокие КПД и cosφ, но плохие показатели расхода материалов на единицу мощности, большую массу и габариты. Если же в аналогичном двигателе В небольших двигателях мощностью менее 2 – 3 кВт, может достигать значения 0, 5 – 0, 6, несмотря на правильно выбранные размеры и малое насыщение магнитопровода. Это объясняется относительно большим значением магнитного напряжения воздушного зазора, характерным для двигателей малой мощности. При расчете параметров асинхронной машины для номинального режима работы следует учитывать, что с увеличением нагрузки увеличивается поток рассеяния и в связи с этим из-за возрастания насыщения отдельных участков магнитопровода полями рассеяния уменьшаются индуктивные сопротивления x1 и х2. Параметрами асинхронной машины называют активные и индуктивные сопротивления обмоток статора x1, r1, ротора х2, r2, сопротивление взаимной индуктивности x12 и расчетное сопротивление r12 (или r2μ ), введением которого учитывают влияние потерь в стали статора на характеристики двигателя. В программе проектирования электрической машины в этом блоке предусмотрен ряд проверок исключающих появление указанных ошибок и позволяющих правильно скорректировать рассчитываемые параметры с точки зрения их оптимизации (рис. 4.16). Увеличение скольжения в двигателях с короткозамкнутым ротором приводит к возрастанию действия эффекта вытеснения тока, что вызывает изменение сопротивлений обмотки ротора г2 и х2. При расчете рабочих режимов машины в пределах изменения скольжения от холостого хода до номинального эти изменения незначительны и ими обычно пренебрегают.
Рис. 4.15. Расчет магнитной цепи и выбор величины Намагничивающего тока
Рис. 4.16. Заключительный этап блока расчета |
Последнее изменение этой страницы: 2019-10-04; Просмотров: 186; Нарушение авторского права страницы
 ,
,  , мм2,
, мм2,  .
.
 , А,
, А, 
 служит определенным критерием правильности произведенного выбора и расчета размеров и обмотки двигателя (рис. 4.15). Так, если при проектировании четырехполюсного двигателя средней мощности расчет показал, что
служит определенным критерием правильности произведенного выбора и расчета размеров и обмотки двигателя (рис. 4.15). Так, если при проектировании четырехполюсного двигателя средней мощности расчет показал, что