
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Анализ полученных результатов – на основании выводов, сделанных в пп. 3.3.2 и 3.3.3. ⇐ ПредыдущаяСтр 3 из 3
Текст файла-сценария с указанием в комментариях номера группы, состава бригады и даты проведения работы. Отчет оформляется на листах формата А4, допускается рукописное, печатное или комбинированное оформление.
Модальный синтез управления в линейных непрерывных системах Цель работы Данная лабораторная работа предназначена для первого практического ознакомления с применением модального метода для синтеза управления. Ее целью является исследование взаимосвязи между расположением собственных чисел и качеством процессов и выработка обоснованного подхода к выбору желаемых полюсов системы при осуществлении модального синтеза. В качестве неизменяемой части системы следует принять одну из систем, заданную передаточной функцией в работе №3, с теми же значениями параметров (номер системы выбирается из табл. 4.1 согласно варианту).
Таблица 4.1 Выбор исследуемой системы (см. также табл. 3.1)
Подготовительная часть По передаточной функции разомкнутой системы (объекта) записать соответствующие векторно-матричные уравнения. Записать в общем виде уравнение обратной связи, т.е. выражение для синтезируемого управляющего сигнала (входного сигнала объекта) в векторно-матричной форме. Дать определение и вычислить размерности всех входящих в уравнение переменных. Записать векторно-матричные уравнения замкнутой системы. По результатам выполнения пп. 4.2.1 и 4.2.2 составить подробную структурную схему замкнутой системы (т.е. системы «регулятор + объект управления») с показом структуры объекта и обратных связей по каждому элементу вектора состояния. Дать описание алгоритма вычисления матрицы обратной связи. Привести описание алгоритма вычисления коэффициента усиления по командному сигналу. Изучить материалы лекций по темам «Основные показатели качества», «Обратная связь по состоянию, обеспечивающая заданное (желаемое) расположение собственных чисел в замкнутой системе с одним (скалярным) входом», а также проанализировать данные, полученные в процессе выполнения лабораторных работ №2 и 3, где требовалось проводить анализ влияния собственных чисел систем на их динамические свойства. Выполнение работы Подготовить файл-сценарий, реализующий процедуру модального синтеза управления для изучаемой системы. Реализовать в Simulink структурную схему замкнутой системы, предусмотрев возможность наблюдения сигнала на входе и выходе объекта. Пример модели для системы №1 (sys1_mod.mdl) представлен на рис. 4.1 и 4.2, а содержание
%Модальный синтез управлениЯ в линейных непрерывных системах %Система #1 %Вывод информации – в командное и графические окна
%Очистка всех переменных в памЯти clear all
%Очистка командного окна clc %Закрытие всех предыдущих рисунков set (0, 'ShowHiddenHandles', 'on') delete (get(0, 'Children'))
%Установка параметров моделированиЯ для mdl‑ файла h_max = 0.01; %максимальный шаг моделированиЯ t_end = 20; %времЯ завершениЯ моделированиЯ
%задание переменной преобразованиЯ Лапласа длЯ последующего описаниЯ %системы в виде передаточной функции p = tf('p');
%Параметры системы #1 длЯ варианта #20 T1_s1 = 4; T2_s1 = 1; T3_s1 = 48;
%Описание разомкнутой системы через передаточную функцию disp ('ПередаточнаЯ функциЯ системы #1 в разомкнутом состоЯнии'); disp([' ' num2str (T1_s1) '*p+1']) disp ('–'); disp([' (' num2str (T2_s1) '*p+1)*(' num2str (T3_s1) '*p‑ 1)*p']); R_s1 = T1_s1*p+1; Q_s1 = (T2_s1*p+1)*(T3_s1*p‑ 1)*p; W_s1_r = R_s1/Q_s1
%Преобразование описаниЯ в ss‑ форму (получение описаниЯ через матрицы % A, B, C, D) sys1_r = ss (W_s1_r); [A_s1_r, B_s1_r, C_s1_r, D_s1_r] = ssdata (sys1_r); disp ('Матрицы A, B, C, D разомкнутой системы'); A_s1_r B_s1_r C_s1_r D_s1_r
%Вычисление нулей и полюсов ПФ разомкнутой системы [zeros_s1_r, poles_s1_r, koef_s1_r] = zpkdata (zpk(W_s1_r), 'v'); disp ('Нули и полюсы ПФ разомкнутой системы'); zeros_s1_r poles_s1_r
%Проверка правильности вычислениЯ матрицы динамики при домашней подготовке %путем вычислениЯ ее собственных чисел и сравнениЯ их c poles_s1_r disp ('Cобств. числа матрицы динамики разомк. сис-мы (из домашней подготовки)'); poles_s1_r_dp = eig([-47/48 1/48 0; 1 0 0; 0 1 0])
%Желаемые полюсы замкнутой системы (задаютсЯ после анализа расположениЯ %полюсов разомкнутой системы) disp ('Желаемые полюсы замкнутой системы'); poles_s1_z_g = [-2+2*j; -2–2*j; -0.25]
%Расчет матрицы обратных свЯзей L, реализующей желаемое расположение %полюсов замк. сис. [L_s1, PREC_s1, MESSAGE_s1] = PLACE (A_s1_r, B_s1_r, poles_s1_z_g); disp ('Матрица обратных свЯзей'); L_s1
%Матрица динамики замкнутой системы A_s1_z = A_s1_r-B_s1_r*L_s1;
%Матрицы B, C, D замкнутой системы B_s1_z = B_s1_r; C_s1_z = C_s1_r; D_s1_z = D_s1_r;
%Описание замкнутой системы в ss‑ форме sys1_z = ss (A_s1_z, B_s1_z, C_s1_z, D_s1_z);
%Расчет коэффициента усилениЯ по командному сигналу (должен обеспечивать %единичную статику) W_s1_z = tf (sys1_z); [num_s1, den_s1] = tfdata (W_s1_z, 'v'); disp ('Коэффициент усилениЯ по командному сигналу'); %Вычисление коэффициента усилениЯ по командному сигналу %как отношениЯ свободных членов полиномов знаменателЯ и числителЯ, %передаточной функции замкнутой системы, т.е. последних элементов %в векторах коэффициентов знаменателЯ и числителЯ Kv_s1 = den_s1 (length(den_s1))/num_s1 (length(num_s1))
%Описание итоговой замкнутой системы в ss‑ форме B_s1_z = Kv_s1*B_s1_r; sys1_z = ss (A_s1_z, B_s1_z, C_s1_z, D_s1_z);
%Фактические собственные числа итоговой замкнутой системы %(сравнить с заказанными) [zeros_s1_z_f, poles_s1_z_f, koef_s1_z_f] = zpkdata (zpk(sys1_z), 'v'); disp ('Нули и полюсы замкнутой системы с синтезированным управлением'); zeros_s1_z_f poles_s1_z_f
%Рисунок, отображающий расположение нулей и полюсов до и после %замыканиЯ обратных свЯзей figure plot (real(poles_s1_r), imag (poles_s1_r), 'rs', real (zeros_s1_r), imag (zeros_s1_r), 'ro') hold on plot (real(poles_s1_z_f), imag (poles_s1_z_f), 'bs', real (zeros_s1_z_f), … imag (zeros_s1_z_f), 'bo', 'MarkerSize', 14) grid on title ('Расположение нулей и полюсов до и после замыканиЯ обратных свЯзей') xlabel ('real(z)'); ylabel ('imag(z)'); legend ('poles of sys1 (razomk)', 'zeros of sys1 (razomk)', … 'poles of sys1 (zamkn)', 'zeros of sys1 (zamkn)', 0);
%переходный процесс в замкнутой системе c синтезированным управлением ltiview({'step'}, sys1_z, t_end); grid on
%вызов модели open_system ('sys1_mod.mdl'); %запуск моделированиЯ sim ('sys1_mod');
Назначение всех использованных при создании данной программы функций Matlab приводится в приложении. Как следует из текста вышеприведенного файла, процедура модального синтеза управления предполагает выполнение следующих шагов: – описание объекта (ввод исходных данных); – преобразование описания объекта к ss‑ форме и нахождение матриц A, B, C, D; – вычисление нулей и полюсов ПФ разомкнутой системы; – анализ расположения нулей и полюсов разомкнутой системы и назначение желаемых полюсов замкнутой системы; – расчет матрицы обратных связей, реализующей желаемое расположение полюсов замкнутой системы; – вычисление передаточной функции полученной замкнутой системы и коэффициента усиления по командному сигналу Результаты вычислений на каждом из этапов выводятся в командное окно. Также в программе предусмотрено проведение ряда проверок (с использованием данных из командного окна): сравнение собственных чисел матрицы динамики разомкнутой системы, полученной в ходе предварительной подготовки, с собственными числами разомкнутой системы, рассчитанными в Matlab; проверка правильности работы процедуры расчета матрицы обратных связей – вычисление фактических значений полюсов полученной замкнутой системы и сравнение их со значениями желаемых полюсов. Кроме того, по завершении процедуры модального синтеза будет выведено графическое окно с расположением нулей и полюсов системы на комплексной плоскости до и после замыкания обратных связей, построен график переходного процесса для замкнутой системы и запущена модель Simulink, содержащая структурную схему замкнутой системы.
Рис. 4.1. Структурная схема замкнутой системы в Simulink
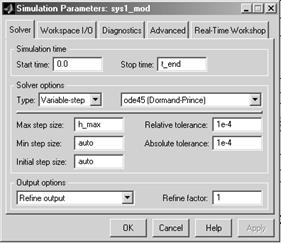
а б Рис. 4.2. Настройка параметров: а – моделирования; б – в блоке State-Space В тексте описанного выше файла-сценария скорректировать исходные данные в соответствии с номером варианта, задать матрицу динамики, рассчитанную при домашней подготовке, и задать некоторое желаемое расположение полюсов замкнутой системы. Скорректировать описание объекта в блоке State-Space модели, если это необходимо. Запустить программу на выполнение, после чего проверить правильность предварительных расчетов и корректность работы встроенной в Matlab процедуры расчета матрицы обратных связей place. Убедиться в правильности описания замкнутой системы при помощи структурной схемы в Simulink, сравнив переходный процесс в графическом окне и на экране осциллографа. В случае отсутствия ошибок сохранить полученные файл-сценарий и структурную схему в файл. Выявить взаимосвязь между расположением нулей и полюсов замкнутой системы на комплексной плоскости и качеством процессов управления, варьируя желаемые собственные значения и фиксируя при помощи встроенных средств LTI Viewer (описание LTI Viewer см. в приложении) значения времени регулирования tp и перерегулирования s (основных показателей качества переходного процесса). Величину допуска («трубки») принять равной ±5%. Также необходимо фиксировать максимальные значения управляющего воздействия umax по осциллографу в модели замкнутой системы в Simulink. Результаты необходимо оформить, заполнив табл. 4.2, 4.3 и 4.4. Выполнение этого пункта лабораторной работы может существенно облегчить следующий подход: стремиться располагать полюсы замкнутой системы таким образом, чтобы приблизить ее к системе 2‑ го порядка, так как обеспечить требуемое качество управления в такой системе значительно проще; принимать во внимание тот факт, что значения показателей качества зависят от расположения на комплексной плоскости полюсов, ближайших к мнимой оси. Тогда, во-первых, необходимо обеспечить расположение всех полюсов слева от мнимой оси (система должна быть устойчива в замкнутом состоянии); во-вторых, ближайшей к мнимой оси должна быть пара комплексно сопряженных полюсов, не считая полюсов, компенсирующих нули системы; в-третьих, все остальные полюсы должны находиться значительно левее, чтобы не оказывать влияния на характер переходной функции (соответствующие им моды будут обладать меньшим временем переходного процесса и вносить меньший вклад в выходной сигнал). Однако следует помнить, что чрезмерный сдвиг полюсов влево может привести к значительному увеличению коэффициентов обратных связей, росту пиковых значений управляющего воздействия и появлению нелинейных эффектов в реальных системах, поскольку для них всегда производится ограничение управляющего сигнала. Изучение поведения систем второго порядка на примере колебательного звена показывает, что время переходного процесса определяется расстоянием пары комплексно сопряженных полюсов p 1, 2 = a ± j b до мнимой оси (это время равно приблизительно утроенной обратной величине их действительной части, tp»3/|a|), а от соотношения |b|/|a| мнимой и действительной частей зависит колебательность процесса.
Таблица 4.2. Зависимость максимального значения управляющего воздействия от расстояния до мнимой оси наиболее удаленного от нее полюса замкнутой системы
Таблица 4.3. Зависимость времени регулирования от расстояния до мнимой оси ближайших к ней собственных значений замкнутой системы
Таблица 4.4 Зависимость перерегулирования от соотношения мнимой и действительной частей ближайших к мнимой оси собственных значений замкнутой системы
Данные таблиц представить в виде соответствующих графиков, используя средства Matlab. Сохранить графики в файл. Обеспечить требуемое качество процессов управления в замкнутой системе: время регулирования tр = 6 с, перерегулирование s»15–20%. Сохранить протокол работы, выводимый в командное окно, расположение нулей и полюсов на комплексной плоскости, переходный процесс и управляющий сигнал в замкнутой системе. Критерием успешного завершения лабораторной работы считается существенное сокращение времени на выбор расположения полюсов, обеспечивающих требуемое качество управления в замкнутой системе. В конце занятия преподаватель проводит проверку и просит обеспечить произвольное значение времени регулирования и перерегулирования переходного процесса в замкнутой системе.
Содержание отчета Исходные данные лабораторной работы: название работы, цель работы, ПФ исследуемой системы с указанием значений параметров, соответствующих номеру варианта. Подготовительная часть, оформленная в соответствии с требованиями п. 4.2. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-05; Просмотров: 170; Нарушение авторского права страницы
 (т.е. как отношения свободных членов полиномов знаменателя и числителя передаточной функции замкнутой системы).
(т.е. как отношения свободных членов полиномов знаменателя и числителя передаточной функции замкнутой системы).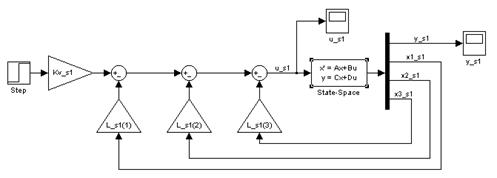







 , с
, с

 , с
, с



 , %
, %
