
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Расчет регулирующего органа ⇐ ПредыдущаяСтр 10 из 10
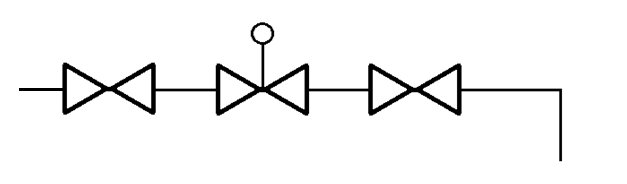
Цель расчета: Исполнительный механизм должен отвечать требованиям, выявленным при анализе принятого закона регулирования или управления системы, а также требованиям, определяющим совместную работу с выбранным регулирующим органом, т.е. должен удовлетворять требованиям заданных динамических и статических характеристик исполнительного устройства. Выбор исполнительного механизма производится на стадии проектирования системы регулирования в соответствии с конкретными условиями его работы. При этом исполнительный механизм должен: 1) обеспечивать необходимую скорость регулирования, определяемую динамикой системы; 2) обеспечивать линейную ходовую характеристику (статическую), т.е. постоянство коэффициента передачи по мощности во всем диапазоне изменения регулируемой величины. При этом ИМ не будет искажать выбранного закона регулирования; 3) сохранять равенство между перемещением выходного элемента и рабочим ходом затвора регулирующего органа. Если это равенство не выполняется, необходимо подобрать механическую связь между исполнительным механизмом и регулирующим органом. При этом коэффициент передачи связи должен быть учтен (как и всякого звена, входящего в систему автоматического регулирования). При выборе исполнительного механизма, кроме требований, предъявляемых системой регулирования, необходимо учитывать следующее: 1) Желательно, чтобы виды энергии, создающие перестановочное усилие, и энергии командного сигнала от регулирующего блока системы были идентичны: в противном случае следует предусмотреть наличие соответствующих преобразователей; 2) ИМ должны применяться с учетом окружающих условий и иметь соответствующее исполнение (пыле - брызги - взрывозащищенное); 3) ИМ должны отвечать требованиям по энергетическим, эксплуатационным и экономическим показателям, а также требованиям надежности, предъявляемых в зависимости от степени ответственности регулируемой величины; 4) Наименее важным фактором при выборе исполнительного механизма является его масса габаритные размеры, однако в отдельных случаях эти показатели также следует учитывать, если этого требует специфика его применения. Выбор и расчет регулирующего органа Цель расчета: 1. Расчет условной пропускной способности (Kvц); 2. Выбор диаметра условного прохода (Ду); 3. Выбор конкретного типа клапана. Исходные данные: 1. Вещество – вода 2. Температура вещества t˚ =20 ˚ C 3. Максимальный объемный расход Qo max = 150м³ /ч 4.Минимальный объемный расход Qo min =100 м³ /ч 5. Давление в начале участка трубы, на котором стоит клапан Pн = 15кгс/см² 6. Давление в конце трубы Рк = 6кгс/см² 7. Длина трубопровода Дтр = 100мм Расчет 1. Из таблиц находим недостающие для расчета данные: Плотность вещества ρ =996, 5 кг/м³ Динамическая вязкость μ =0, 8007 сПз 2. Составляем схему трубопровода:
3. Определяем число Рейнольдса для max и min расходов по одной из формул стр. 437-439 (Шипетин «Техника проектирования систем автоматизации тех. процессов» 2000 г. 496 стр.)
4. Определяем среднюю скорость потока для max и min расходов:
5. Определяем коэффициент трения для max и min расходов. Если
6. Определяются потери на трение при max и min расхода
7. Определяем потери на местные сопротивления. Для входа в трубу Для выхода из трубы Для колена Для вентиля
8. Определяем Суммарные потери:
9. Определяем max и min пропускную способность клапана с учетом коэффициента запаса:
10. Определяем max и min пропускную способность клапана с учетом коэффициента запаса:
11. Выбираем стандартные значения;
12. Находим
13. Поправка на вязкость ψ = 1
14. Определяем пропускную способность клапана с учетом влияния вязкости:
15. Определяем относительное положение затвора клапана при max и min расходах:
Клапан выбран верно, если 0, 6 0, 3 16. Выбирается конкретный тип клапана для Dy = 100мм и 25ч32нж
ЗАКЛЮЧЕНИЕ В данном курсовом проекте я рассматривала вопросы связанные с автоматизацией своего производства – «Организация работ по ремонту и наладке систем автоматизации производства кислорода на промышленном предприятии» |
Последнее изменение этой страницы: 2019-06-19; Просмотров: 925; Нарушение авторского права страницы
 (1)
(1) (2)
(2) =(150
=(150  (3)
(3)  ==(100
==(100  (4)
(4)
 =
=  (5)
(5) =
=  (6)
(6) = 5
= 5  (7)
(7) = 5
= 5  (8)
(8) 0, 5
0, 5 1
1 1, 1
1, 1 5
5 (9)
(9)  5
5  (10)
(10) (11)
(11) 5
5  (12)
(12) (13)
(13) (14)
(14) (15)
(15) (16)
(16) (17)
(17) (18)
(18) (19)
(19) (20)
(20)

 = (для
= (для  249, 84 (22)
249, 84 (22) 0, 9 (23)
0, 9 (23) 0, 4 (24)
0, 4 (24) .
.

 =250 (м² /ч)
=250 (м² /ч)