
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Оценка ожидаемой точности полученных результатов
Вычисляем ожидаемую точность найденных координат точки Р по формулам
где S – расстояния, измеренные по схеме, м; φ 1=50◦ ψ 1=44◦ ; SAB=310; SCP=200; SCB=270; SAP=210; ρ =206265''
φ 2=17◦ ψ 2=43◦ ; SAB=310; SCP=210; SCB=390; SAP=210; ρ =206265''
По завершению данного раздела можно сделать вывод о том, что обратная многократная засечка найдена определением 4- го пункта по 3-м исходным пунктам и двум углам. Также по исходным данным и верно выполненным расчетам, соответствующих контролю, составлены наглядные таблицы.
Уравнивание ходов полигонометрии второго разряда, Образующих узловую точку З.1 Схема ходов и результаты измерений углов и линий Требуется уравнять систему теодолитных ходов с одной узловой точкой 6, опирающихся на пункты и стороны ранее построенной сети более высокого класса. Составляем схему ходов с одной узловой точкой (Рисунок 3) и результаты измерений записываем в таблицу исходных данных (Таблица 5).
Рисунок 3- Схема ходов полигонометрии 2- го разряда Таблица 5 - Исходные данные
Вычисление координат исходных пунктов и дирекционных углов исходных направлений На основании (Таблицы 5) вычисляем координаты всех исходных пунктов и дирекционных углов исходных направлений. Таблица 6 - Данные по исходным пунктам
Составляем ведомость и вычисляем дирекционные углы, если известны исходные направления (см. Приложение 2). Дирекционные углы определяем по формуле α = α пред+180◦ - β (14) Вычисление и уравнивание дирекционного угла узловой линии Теодолитные ходы уравнивают упрощенно: вначале уравнивают углы, затем вычисляют и уравнивают приращения координат. Уравнивание углов начинают с выбора узловой линии, в качестве которой может быть принята любая сторона хода примыкающая к узловой точке 6. В нашем случае за узловую линию примем сторону 6-7. Таблица 7 - Уравнивание дирекционного угла узловой стороны. С=const=1
Вычисляем сумму измеряемых углов по каждому ходу и дирекционный угол узловой линии (стороны 6-7). Дирекционный угол узловой линии по формуле. α 67 = α нач +180◦ ∙ n - ∑ β пр (15) где n - количество ходов. Находим вероятнейшее значение дирекционного угла узловой линии по данным всех ходов. По формуле: α уравн. = α 0 + [∆ α i ∙ Pi] /[ Pi] (16) где α 671=322о20’36”+180o*7-1385o12’10”=197o08’25” α 672=142o20’36”+180o*6-1025o12’08”=197°08'28" α 673=218o28’02”+180o*7-1101o19’47”=197 o08’15” α уравн.=197o08’+23”= 197°08 '23" Вычисляем угловые невязки ходов и при допустимых значениях, распределяем их поровну на все измеренные углы. fβ = α i - α уравн. (18) fдоп= 20” ∙ √ n (19) где n количество углов, fдоп 1=53” fдоп 2=49” fдоп 3=53” Выяснив, что невязки являются допустимыми, распределим их с тем же знаком в соответствующих ходах поровну на каждый угол. Затем вычислили дирекционные углы всех сторон. По вычисленным дирекционным углам и длинам сторон вычислили приращения координат и их суммы по всем ходам. Вычисление и уравнивание координат узловой точки Вычисляем по уравненным углам дирекционные углы и приращения координат для сторон и ходов. Вычисляем координаты узловой точки по данным каждого хода: Хузл= Хисх + ∑ ∆ Хi (20) Yузл= Yисх + ∑ ∆ Yi (21) Вычислили веса Pi для значений координат узловой точки. С = 10000 Таблица 8 - Уравнивание координат узловой точки
Последнее изменение этой страницы: 2020-02-16; Просмотров: 135; Нарушение авторского права страницы Главная | Случайная страница | Обратная связь | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 (13)
(13) - СКО положения определяемого пункта;
- СКО положения определяемого пункта;  - СКО измерения углов;
- СКО измерения углов;  - углы, измеряемые транспортиром по схеме;
- углы, измеряемые транспортиром по схеме;  =(0, 0150*√ 2002/2702 + 2102/3102) = 0, 0150 м.
=(0, 0150*√ 2002/2702 + 2102/3102) = 0, 0150 м.  =(0, 01735*√ 2102/3902 + 2202/3102) = 0, 0150 м.
=(0, 01735*√ 2102/3902 + 2202/3102) = 0, 0150 м. 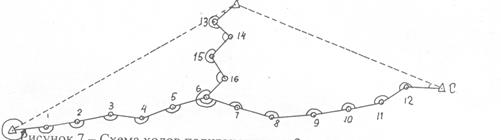








 Невязка
Невязка 

 =
=  -приближенное значение α исх. (17)
-приближенное значение α исх. (17)