|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
На курсовой проект по теории механизмов и машинСтр 1 из 3Следующая ⇒
Задание На курсовой проект по теории механизмов и машин студента Аносов В. М. группы ТВ – 317 1. Тема курсового проекта – «Синтез и анализ машинного агрегата (насос двойного действия)». 2. Исходные данные к проекту: рычажный механизм – задание 2, вариант 1, положение механизма 2; кулачковый механизм – вариант 14; зубчатый механизм – вариант 8. 3. Содержание пояснительной записки (перечень вопросов, подлежащих разработке): синтез и анализ рычажного механизма; синтез кулачкового механизма; синтез и анализ зубчатых механизмов. 4. Перечень графического материала: рычажный механизм (лист 1); кулачковый механизм (лист 2); зубчатый механизм (лист 3). 5. Руководитель проекта (подпись)_______________ 6. Дата выдачи задания на проект «__»_____________2006г. 7. Подпись студента ____________________
Содержание
Введение..................................................................................................... 4 1.Анализ рычажного механизма................................................... 7 1.1 Исходные данные...................................................................................... 7 1.2 Построение планов положений................................................................ 7 1.3 Структурный анализ................................................................................. 8 1.4 Расчёт механизма на ЭВМ........................................................................ 9 1.5 Кинематический анализ методом планов............................................... 10 1.5.1 Построение плана скоростей............................................................. 10 1.5.2 Построение плана ускорений............................................................ 13 1.6 Силовой расчёт....................................................................................... 16 1.6.1 Определение инерционных факторов............................................... 16 1.6.2 Силовой расчёт группы Ассура II2(4, 5)........................................... 17 1.6.3 Силовой расчёт группы Ассура II1(2, 3)........................................... 18 1.6.4 Силовой расчёт механизма I класса................................................. 20 1.7 Сравнение результатов графоаналитического...................................... 20 и «машинного» расчётов.............................................................................. 20 2. Синтез и анализ кулачкового механизма........................ 23 2.1 Построение диаграмм движения толкателя........................................... 23 2.2 Определение основных размеров механизма........................................ 24 2.3 Построение профиля кулачка................................................................. 25 3. СИНТЕЗ И АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ.............................. 27 3.1 Расчет геометрических параметров механизма..................................... 27 3.2 Построение окружностей и линий зацепления...................................... 28 4.3 Построение профилей зубьев................................................................. 29 4.4 Построение зацепления........................................................................... 30 Введение
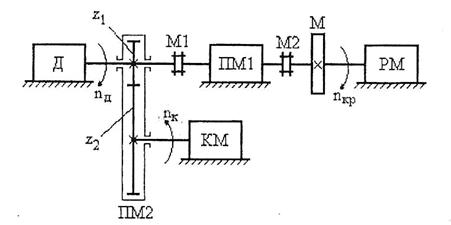
Теория механизмов машин является основой проектирования работоспособных технических объектов. Основные задачи ТММ – анализ механизмов с заданными параметрами и проектирование механизмов, удовлетворяющих заданным требованиям. Результаты решения задач ТММ являются исходными данными для более детального проектирования объектов методами деталей машин, сопротивления материалов и специальных дисциплин. Объектом данного курсового проекта является машинный агрегат, структурная схема которого приведена на рис. 1
Вращение от двигателя Д через муфту М1 передается на ведущий вал передаточного механизма ПМ1 (планетарной передачи), который меняет частоту вращения Д n Д до заданной частоты вращения кривошипа n кр рабочей машины РМ. Ведомый вал ПМ1 соединяется с валом кривошипа РМ муфтой М2. Вращение от Д на вал кулачка кулачкового механизма КМ передается передаточным механизмом ПМ2, состоящим из зубчатых колес z 1 и z 2 и преобразующим n д в заданную частоту вращения кулачка n к. РМ выполнена на базе плоского рычажного механизма; плоский КМ состоит из вращающегося кулачка и толкателя. РМ выполняет заданную технологическую операцию, КМ выполняет вспомогательные функции. Маховик М устанавливается на валу кривошипа РМ и служит для снижения коэффициента неравномерности вращения δ при установившемся движении до заданной величины. Задача курсового проекта состоит в определении параметров, кинематических и силовых характеристик механизмов машинного агрегата, а также в определении его некоторых силовых характеристик. «Насос двойного действия»
Проектируемый машинный агрегат работает следующим образом:
Рис. 1.2 Структурная схема насоса двойного действия Насос предназначен для перекачивания жидкости под воздействием прямого и обратного ходов поршня 5, который приводится в движение шестизвенным кривошипно-коромысловым механизмом, состоящим из кривошипа 1, шатунов 2 и 4 и коромысла 3. Привод кривошипа 1 включает в себя электродвигатель и планетарный редуктор. Система смазки насоса снабжена плунжерным насосом, на основе кулачкового механизма, имеющего привод от электродвигателя через пару зубчатых колес (см. рис. 1.1). При движении поршня справа налево (см. рис. 1.2) в левой части полости цилиндра происходит увеличение давления и при Qmax жидкость через нижний клапан нагнетается в сеть. В правой части полости одновременно идет процесс всасывания через верхний клапан при давлении 0, 1 Qmax ниже атмосферного. При обратном движении поршня в левой части полости цилиндра открывается верхний клапан и происходит всасывание 0, 1 Qmax ниже атмосферного, а в правой – открывается нижний клапан и происходит нагнетание в сеть. Сила сопротивления, действующая на поршень насоса, будет равна сумме сил ( 0, 1 Qmax + Qmax ), действующих в обеих частях полости цилиндра и всегда направлена против скорости движения поршня. Анализ рычажного механизма Исходные данные
Структурная схема механизма приведена на рис.2, где механизм изображён в заданном положении. Геометрические размеры и другие заданные постоянные параметры приведены в табл.1.1. Согласно рекомендациям в заданиях вес звена 5 принять G 5 H.
Рис.2. Структурная схема рычажного механизма Таблица 1.1 Заданные параметры механизма
1.2 Построение планов положений Для построения планов положений механизма принимается масштаб:
Заданные размеры механизма Li в принятом масштабе К S изображаются чертёжными размерами 1 i определяемыми по выражению:
Чертёжные размеры механизма, определены по (1.1), приведены в табл.1.2. Таблица 1.2 Чертёжные размеры звеньев механизма
Используя найденные чертёжные размеры, на листе 1 проекта построены крайние и заданное положение механизма.
Структурный анализ Структурная схема механизма приведена на рис.2, где подвижные звенья обозначены арабскими цифрами ( 1 – кривошип, 2 и 4 – шатуны, 3 – коромысло, 5 – ползун). Кинематические пары V класса также обозначены арабскими цифрами, обведенными кружками. Поскольку механизм плоский, то его степень подвижности определяется по формуле П. Л. Чебышева: W = 3n – 2PV – PIV, (1.2.) где: n = 5 – число подвижных звеньев, PV = 7 – количество кинематических пар V класса, PIV = 0 – количество кинематических пар IV класса. Таким образом, степень подвижности рассматриваемого механизма: W = 3 · 5 – 2 · 7 – 0 = 1. Механизму необходимо одно начальное звено для полной определённости его движения. В качестве начального принято звено 1, закон его движения – вращение с частотой n 1 = const.
Рис.3. Структурные элементы механизма
а) группа Ассура 2 – го класса, 2 – го вида (рис.3, а); б) группа Ассура 2 – го класса, 1 – го вида (рис.3, б); в ) механизм 1 – го класса (рис.3, в). Таким образом, формула строения механизма имеет вид: I (1)→ II 1 (2, 3)→ II 2 (4, 5). Поскольку наивысший класс груп Ассура, входящих в состав механизма – второй, то и механизм в целом относится ко второму классу.
Расчёт механизма на ЭВМ
Для расчёта механизма на ЭВМ подготовлена таблица исходных данных (табл.1.3.). По результатам расчётов на ЭВМ получена распечатка (см. следующую страницу), расшифровка обозначений которой и сравнение с результатами «ручного счёта» приведено ниже (п.1.8.). Строка «Положение центров масс» таблицы «Параметры звеньев» распечатки необходимы для дальнейших расчётов и построений: – расшифровывается следующим образом (точки Si – центры масс звеньев): LS1 = LO1S1 = 0; LS2 = LAS2 = 0, 243 м; LS3 = LO3S3 = 0 м; LS4 = LCS4 = 0, 083 м. Чертёжные размеры, определяющие положения ценры масс: AS 2 = 48, 6 мм; CS 4 = 16, 6 мм. Таблица 1.3 Исходные данные для расчёта механизма на ЭВМ
1.5 Кинематический анализ методом планов Поскольку одним из свойств групп Ассура является их кинематическая определимость, то кинематический анализ проводится последовательно по группам Ассура, причём порядок их рассмотрения совпадает с направлением стрелок в формуле строения (1.3.).
1.5.1 Построение плана скоростей Механизм I класса (звено 1): – Угловая скорость кривошипа: Вектор скорости точки А перпендикулярен звену 1 и направлен в соответствии с направлением ω 1. Модуль скорости VA = ω 1 · LO 1 A = 39, 8 ∙ 0, 1 = 3, 98 м/c. На плане скоростей этот вектор изображается отрезком ра = 99, 5 мм. Тогда масштаб плана скоростей Группа Ассура II 1 (2, 3). Внешними точками группы являются точки А и О3, внутренней – точка В. Составляется система векторных уравнений, связывающих скорость внутренней точки со скоростями внешних точек: По этой системе строится план скоростей и определяются модули скоростей:
VB = (pb) · kV = 45 · 0, 04 = 1, 80 м/c; VBA = (ab) ∙ kV = 102 ∙ 0, 04 = 4, 08 м/c. Скорости точек S 2 и С находятся с помощью теоремы подобия. Составляется пропорция, связывающая чертёжные размеры звена 2 (АВ, АS2) с отрезками плана скоростей:
откуда определяется длина неизвестного отрезка. Этот отрезок откладывается на отрезке ab плана скоростей. Точка S 2 является концом вектора Модуль вектора VS 2 = ( ps 2 ) ∙ kV = 70, 5 ∙ 0, 04 = 2, 82 м/c. Скорость точки С определяется аналогично по принадлежности звену 3. Определяются величины угловых скоростей звеньев 2 и 3: Для определения направления ω 2 отрезок ab плана скоростей устанавливается в точку В, а точка А закрепляется неподвижно; тогда становится очевидным, что ω 2 направлена по часовой стрелке. Для определения направления ω 3 отрезок pb плана скоростей устанавливается в точку В, а точка О3 закрепляется неподвижно; тогда становится очевидным, что ω 3 также направлена по часовой стрелке. Группа Ассура II 2 (4, 5). Внешними точками группы являются точки С и D 0 (точка D 0 принадлежит стойке), внутренней – точка D, принадлежащая звеньям 4 и 5 (в дальнейшем обозначается без индексов).
Рис.4. Определение направлений угловых скоростей По принадлежности точки D звену 5 вектор её скорости известен по направлению: В результате построения плана скоростей определяются: VD = (pd) ∙ kV = 55 ∙ 0, 04 = 2, 20 м/c; VDC = (cd) kV = 16, 5 ∙ 0, 04 = 0, 66 м/c. Скорость точки S 4 определяется по принадлежности звену 4 аналогично определению скорости точки S 2 по теореме подобия… Звено 5 совершает поступательное движение, поэтому скорости всех точек звена одинаковы и равны скорости точки D. Величина угловой скорости звена 4 определяется аналогично предыдущему:
Для определения направления ω 4 отрезок cd плана скоростей устанавливается в точку D, а точка С закрепляется неподвижно; тогда становится очевидным, что ω 4 направлена по часовой стрелке.
1.5.2 Построение плана ускорений Механизм I класса (звено 1). Точка А кривошипа 1 совершает вращательное движение вокруг О1, поэтому её ускорение есть сумма нормального и тангенциального ускорения:
Поскольку принято n 1 = const (следовательно ε 1 = 0 ), то
Модуль ускорения
На плане скоростей этот вектор изображается отрезком π а = 158 мм, направленным от А к О1. Тогда масштаб плана ускорений
Группа Ассура II 1 (2, 3). Внешними точками группы являются точки А и О3, внутренней – точка В. Составляется система векторных уравнений, связывающих ускорение внутренней точки с ускорениями внешних точек:
В этой системе модули нормальных ускорений
На плане ускорений векторы an`= В результате построения плана ускорений определяются модули ускорений: AB = (π b) ∙ ka = 127 ∙ 1 = 127 м/c
Ускорение точек S 2 и С находятся с помощью теоремы подобия. Составляется пропорция, связывающая чертёжные размеры звена 2 ( АВ, АС2 ) с отрезками плана ускорений:
откуда определяется длинна неизвестного отрезка. Этот отрезок откладывается на отрезке ab плана ускорений. Соединением полюса π с точкой s 2 получается отрезок π s 2 = 147, 5 мм (определено замером). Модуль ускорения точки s 2 aS2 = (π s2) ∙ ka = 147, 5 ∙ 1 = 147, 5 мм/c Ускорение точки С определяются аналогично по принадлежности звену 3. Определяются величины угловых ускорений звеньев 2 и 3:
Для определения направления ε 2 отрезок n ` b плана ускорений устанавливается в точку В, а точка А закрепляется неподвижно; тогда становится очевидным, что ε 2 направлена против часовой стрелки. Для определения направления ε 3 отрезок n `` b плана ускорений устанавливается в точку В, а точка О3 закрепляется неподвижно; тогда становится очевидным, что ε 3 направлена по часовой стрелке.
Рис. 5. Определение направлений угловых ускорений Группа Ассура II 2 (4, 5). Внешними точками группы являются точки С и D 0 (точка D 0 принадлежит стойке), внутренней – точка D, принадлежащая звеньям 4 и 5 (в дальнейшем обозначается без индексов). По принадлежности точки D звену 5 вектор её ускорения известен по направлению:
В этом уравнении модуль нормального ускорения
На плане ускорений вектор
В результате построения плана ускорений определяются модули ускорений: aD = (π d) · ka = 156 · 1 = 156 м/c
Ускорение точки S 4 определяется по принадлежности звену 4 аналогично определению ускорению точки S 2 по теореме подобия… Величина углового ускорения звена 4 определяется аналогично предыдущему:
Для определения направления ε 4 отрезок n ``` d плана ускорений устанавливается в точку D, а точка С закрепляется неподвижно; тогда становится очевидным, что ε 4 направлена по часовой стрелке.
Силовой расчёт И «машинного» расчётов
В распечатке результатов расчёта на ЭВМ (в дальнейшем называемого «машинный») приняты обозначения, которым соответствуют параметры механизма, приведённые таблице 1.7. Таблица 1.7. Соответствие обозначений распечатки и обозначений механизма
В таблице 1.7: β i – угол между вектором скорости γ i – угол между вектором ускорения φ ij – угол между вектором реакции Сравнение результатов графоаналитического и «машинного» расчётов приведено в таблице 1.8, где приняты следующие обозначения: П – обозначение параметра; Пга – величина параметра по результатам графоаналитического расчета; Пм – величина параметра по результатам «машинного» расчёта; Δ – относительные расхождения результатов, определяемое по выражению
Таблица 1.8. Сравнение результатов графоаналитического и «машинного» расчётов
Построение профиля кулачка
1. Из центра в точке О проводятся две окружности радиусами r0=108мм, и ОС=201мм. На окружности ОС выбирается точка С0 , соответствующая положению 0 на диаграмме перемещений. 2. В сторону “-ω ” откладывается угол С0ОС19 который делится на 19 равных частей. Получаем точки С1, С2…С19 – мгновенные положения центра качения толкателя в обращенном движении. 3. Из центров в точках С0…С19 проводятся дуги 0…19 радиусом BC и отмечаются точки их пересечения с окружностью радиусом r0 – точки B0…B19.. Точки Bi и Ci соединяются прямыми, являющимися исходными положениями толкателя в обращенном движении. 4. Строятся действительные положения толкателя в обращенном движении. Для этого в каждом положении откладываются углы BiCiBi’= γ i, где γ i= γ Si·ki - углы поворота толкателя, определяемые по диаграмме перемещений. 5. Точки B0’…B19’ соединяются кривой являющейся теоретическим профилем кулачка на рабочем участке. На участке ближнего стояния теоретический профиль очерчивается по дуге окружности радиусом ri. 6. Отмечаются профильные углы: Ψ y= B00B6 Ψ дс= B60B9 Ψ y= B90B19 7. Определяется радиус ролика и строится действительный профиль кулачка. rр=0.2r0=0.2·108 мм =21.6мм
Построение профилей зубьев
1. На основной окружности (db) откладывается отрезок 0 – 1 = 1- 2 = 2 – 3 = ….=10 мм, концы отрезков соединяем с центром колеса О, для усиления радиуса через точки 1, 2, 3, …, 10 проводятся касательные к основной окружности, как перпендикуляры к соответствующим радиусам. 2. На этих касательных откладываются отрезки 1 - 1́ = 1- 0; 2 - 2́ = 2( 1 -0) и т.д. i – i ́ = i( 1 – 0). Построения ведутся до тех пор, пока точка í не выйдет за пределы окружности вершин. Точки 0́, 1́, 2́, 3́, …, 10́ соединяются кривой. Полученная кривая является кривой боковой поверхности зуба. Отмечаются точки пересечения с основной окружностью МВ и с окружностью вершин точка МА. 3. На делительной окружности откладываются отрезок МN S МN = ——— = 15, 7 мм; 2 где S толщина зуба. Ось симметрии зуба проходит через точку N и центр колеса О. Отмечаются точки пересечения оси симметрии с окружностями вершин NА и с основной окружностью точка NВ от полученных точек на соответствующих окружностях по другую сторону от оси симметрии откладываются отрезки: а) окружности вершин М́ АNА = МАNА; б) делительная окружность М́ N= МN; в) основная окружность М́ вNВ= МВNВ. Тоски М́, М́ В, М́ А соединяются кривой, являющейся левой боковой поверхностью зуба.
Построение зацепления Рассматривается случай зацепления в полюса Р. 1. На делительной окружности первого колеса (d1) влево от полюса Р откладывается отрезок РN11 S РN11 = ——— = 15, 7 мм; 2 проводится ось симметрии первого зуба колеса 1. Используя построения пункта 4.4 строится первый зуб колеса 1. 2. На делительной окружности второго колеса (d2) справа от полюса Р откладывается отрезок РN12 S РN12 = ——— = 15, 7 мм; 2 через точку N12 и центр колеса О2 проводится ось симметрии первого зуба, второго колеса. 3. На делительной окружности d1 от полюса Р откладывается отрезок, равный 15, 7 мм. Конец полученного отрезка точка М21 соединяется с центром колеса 1 прямой, являющейся осью симметрии второго зуба колеса один. 4. На окружности d2 от точки N12, вправо от нее, откладывается четыре раза отрезок равный 15, 7мм. Конец последнего отрезка точка М22 соединяется с центром колеса прямой, являющейся осью симметрии колеса 2. Строится зуб. 5. На окружности d1 откладывается влево от точки N11 отрезок N11 N31 = N11 N21 (хорда, стягивающая окружной шаг Р). Ось симметрии третьего зуба первого колеса проходит через точки N31 и Щ1. Строится зуб. 6. На делительной окружности d2 влево от точки N12 откладывается отрезок N12 N32 = N12 N23 . Ось симметрии третьего зуба второго колеса проходит через точку N23 и центр колеса О2. Строится третий зуб. Изображение трех зубьев полностью раскрывает эвольвентное зацепление.
Аносов В. М. Синтез и анализ машинного агрегата (насос двойного действия): Курсовой проект по теории механизмов и машин. – Челябинск: ЮУрГУ, ТВ, 2006. – 28с., 8илл., библиография литературы – 2 наименований, 2 листа чержей Ф.А1 и 1лист чертежа Ф.А2
В проекте проведен структурный и кинематический анализ, а также проверка работоспособности спроектированного рычажного механизма, расчет маховика по заданному коэффициенту неравномерности, определены основные размеры и построен профиль кулачка кулачкового механизма, проведен синтез эвольвентного зубчатого зацепления с предварительным определением чисел зубьев колес, проведен синтез планетарной зубчатой передачи с предварительным определением ее передаточного отношения, а также кинематический анализ указанной передачи с целью проверки правильности синтеза. Решение перечисленных задач позволило построить кинематическую схему машинного агрегата, как итог курсового проекта. Задание |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-16; Просмотров: 190; Нарушение авторского права страницы




 (1.1)
(1.1)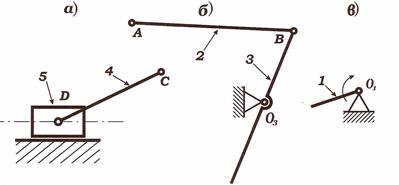 Структурно в состав механизма входят:
Структурно в состав механизма входят:  .
. 


 , начало всех векторов в полюсе р. Поэтому отрезок ps 2 = 70, 5 мм (определено замером) изображает вектор
, начало всех векторов в полюсе р. Поэтому отрезок ps 2 = 70, 5 мм (определено замером) изображает вектор  .
.


 Поэтому для построения плана скоростей для данной группы Ассура достаточно одного векторного уравнения:
Поэтому для построения плана скоростей для данной группы Ассура достаточно одного векторного уравнения: 







 и
и  изображаются отрезками
изображаются отрезками

 ;
;  ∙ ka = 26 ∙ 1 = 26 м/c
∙ ka = 26 ∙ 1 = 26 м/c  = (n``b) ∙ ka = 126, 5 ∙ 1 = 126, 5 м/c
= (n``b) ∙ ka = 126, 5 ∙ 1 = 126, 5 м/c  .
.

 .
.
 D // x - x. Поэтому для построения плана ускорений для данной группы Ассура достаточно одного векторного уравнения:
D // x - x. Поэтому для построения плана ускорений для данной группы Ассура достаточно одного векторного уравнения:  .
.
 изображается отрезком
изображается отрезком
 = (n```d) · ka = 36 · 1 = 36 м/c
= (n```d) · ka = 36 · 1 = 36 м/c  .
. и осью х;
и осью х;  и осью х;
и осью х;  и осью х.
и осью х.