
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Графический способ решения ЗЛП
Графический способ решения применим к ЗЛП в следующей постанвке: 1) целевая функция f→ max(min); 2) ограничения должны быть записаны в виде неравенств, не обязательно одного знака; 3) число переменных n≤ 3. Для простоты изложения рассмотрим случай n=2. Выясним геометрический смысл неравенств, их решений и решений систем неравенств, то есть геометрический смысл системы ограничений. Доказана теорема: множество решений неравенства с двумя переменными
является одной из двух полуплоскостей, на которые вся плоскость делится прямой
включая и эту прямую, а другая половина плоскости с той же прямой есть множество решений неравенства
Пример. Построить множество решений неравенства: а) Решение. В соответствии с теоремой множество решений неравенства есть полуплоскость. а) Построим границу полуплоскости – прямую Для определения искомой полуплоскости (верхней или нижней) рекомендуется задать произвольную контрольную точку, не лежащую на её границе – построенной прямой. Если неравенство выполняется в контрольной точке, то оно выполняется во всех точках полуплоскости, содержащей контрольную точку, и не выполняется во всех точках другой полуплоскости. И наоборот, в случае невыполнения неравенства в контрольной точке оно не выполняется во всех точках полуплоскости, содержащей контрольную точку, и выполняется во всех точках другой полуплоскости. В качестве контрольной точки удобно взять начало координат б)Построим границу полуплоскости — прямую 3х1-2х2=0 по двум точкам (рис. 2). Одной из этих точек является начало коорди- Пример, Построить множество решений системы неравенств Для каждой прямой (границы полуплоскости) находим точки пересечения с осями координат и определяем соответствующую полуплоскость:
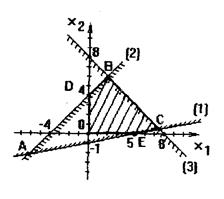
Множеством всех решений системы неравенств – пересечение соответствующих полуплоскостей – треугольник АВС (рис. 3).
(рис. 3 ) Если учесть условия неотрицательности х1 > о; х2> 0, то областью допустимых решений будет та часть треугольника АВС, которая находится в первой четверти, т.е. ОДВСЕ — многоугольник
Итак, в общем случае множество всех допустимых решений системы ограничений ЗЛП при n = 2 — многоугольник решений — является выпуклым многоугольником (рис. З) или, в частности, выпуклой многоугольной областью (рис. 4). Ответ на вопрос. В какой точке многоугольника решений возможно оптимальное решение ЗЛП, дается следующей Фундаментальной Рассмотрим целевую функцию F(х1, х2)= с1х1+с2х2. Она является линейной функцией двух переменных х1, х2. В математическом анализе функций нескольких переменных вводятся понятия линии уровня функции нескольких переменных и градиента функции нескольких переменных. Линией уровня функции двух переменных называется множество точек плоскости, в которых функция сохраняет одно и то же значение, т. е. f(х1, х2)= d или f(х1, x2)= с1х1+ с2х2=d, d=const. Линии уровня широко используются, например, на картах прогноза погоды (изотермы). Еще более простым примером линий уровня являются параллели на географической карте. Это линии уровня широты.
Он обладает следующими свойствами: 1) 2) Если функция
перпендикулярный линиям уровня. Важное свойство линий уровня линейной функции в том, что при параллельном смещении линии в направлении вектора Используя все вышеизложенное, сформулируем порядок решения ЗЛП графическим способом. 1. 3аписать задачу в следующей форме: Г - шах или. - т г., 2. Построить многоугольник решений. 3. Из начала координат построить вектор 4. Решив соответствующую систему уравнений, найти координаты оптимального решения (плана). 5. Вычислить максимальное (минимальное) значение целевой функции и записать ответ. Пример. Решить графически: f = -2x1 – 3x2 → min, при ограничениях x1 – 5x2 ≤ 5, x1 – x2 ≥ -4, x1 + x2 ≤ 8, x1 ≥ 0, x2 ≥ 0. Решение. 1. Задача поставлена в симметричной форме. 2. Многоугольник решений представлен на рис. 3. 3. Восстановим рис. 3 и из начала координат построим вектор c (-2, -3). Перпендикулярно ему проведём линию уровня, проходящую через начало координат. Перемещаем линию уровня в направлении вектора –с до тех пор, пока она имеет общие точки с многоугольником решений. Минимальное значение целевая функция принимает в точке B. 4. найдём координаты точки B. Для этого решим систему линейных алгебраических уравнений:
5. Вычислим значение целевой функции при x1=2, x2=6: f=-2*2-3*6=-22 Ответ: fmin=-22, xопт=(2, 6). Рисунок, иллюстрирующий решение задачи:
рис. 9 Частный случай 1. Решить графически задачу: f=x1+x2→ max; Решение
Рисунок, иллюстрирующий решение задачи:
Многоугольник решений – многоугольная выпуклая область. Оптимальных решений нет, fmax→ ~. Ответ: fmax→ ~; оптимальных решений нет.
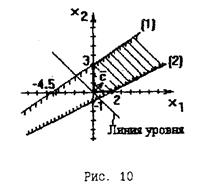
Частный случай 2. Решить графически задачу: F=x1-x2→ max; Решение
Рисунок, иллюстрирующий решение задачи:
Если передвигать линию уровня, то она выйдет из области решений не в одной точке, как это было в основном примере, а сольется с прямой СД, которая является граничной линией области решений. В этом случае условимся говорить, что имеет место альтернативное решение, и с ответе указывать координаты точек С и Д. Координаты точки С находим, решая систему: Координаты точки Д находим, решая систему:
Значение целевой функции f(C)=5-3=2; f(Д)=2-0=2; fmax=f(C)=f(Д) Ответ: fmax=2, Пример. Решить графически: f=9x1+3x2-5x3+5x4→ max;
Решить пример самостоятельно. Ответ: fmax=2, xопт=(2, 0, 0, 2) Симплекс-метод решения ЗЛП. В основе геометрической интерпретации решения системы m линейных уравнений с n неизвестными (m< n) лежит теорема: каждому допустимому базисному решению системы ограничений ЗЛП соответствует угловая точка многоугольника решений. Справедлива и обратная теорема: каждой угловой точке множества допустимых решений системы ограничений (многоугольника решений) соответствует допустимое базисное решение. Обобщая упомянутые в этом параграфе теоремы можно сформулировать следствия: если существуют, и при том единственное оптимальное решение задачи линейного программирования, то оно совпадает с одним из допустимых базисных решений системы ограничений. Очевидно, число допустимых базисных решений конечно и не превышает Число перебираемых допустимых базисных решений можно значительно сократить, если производить перебор не беспорядочно, а с учетом изменения целевой функции, добиваясь, чтобы каждое следующее решение было «лучше» или, по крайней мере «не хуже», чем предыдущее, то есть увеличивалось при отыскании максимума, и уменьшалось при отыскании минимума. Идея последовательного улучшения легла в основу универсального метода решения ЗЛП – симплекс-метода. Впервые симлексный метод решения был предложен американским ученым Дж.Данцигом в 1949 году, хотя еще в 1939 году его идеи были разработаны советским ученым Л.В. Канторовичем. На основе симплекс метода создан пакет прикладных программ 1рх88, обладающий достаточно большими вычислительными возможностями. Однако, студентом необходимо ознакомиться с сутью этого метода, которую мы изложим на примере. Симплекс-метод изложим для ЗЛП, поставленной в канонической форме: f→ min, ограничения в виде системы уравнений, число переменных любое. Пример. Решить симплекс-методом задачу: F=4-x2+x5→ min;
1. Проверим, является ли система уравнений совместной. Для этого найдем ранг матрицы и ранг расширенной матрицы:
2. Построим какое-либо исходное допустимое базисное решение системы ограничений задачи. В качестве базисных выбираем те три переменные, при который определитель 3 порядка не равен нулю и содержит больше нулей и единиц. Выразим целевую функцию через свободные переменные. 1 этап: х1, х3, х4 – базисные, х2, х5 – свободные;
Проверим, является ли построенное базисное решение допустимым, то есть выполняются ли неравенства Xj≥ 0. Если решения не является допустимым, в качестве базисных выбираем три другие переменные, при которых определитель не равен нулю. 3. Поставим вопрос – можно ли каким либо образом «улучшить» решение? Легко понять, что функцию можно уменьшить за счёт увеличения любой свободной переменной, входящей в выражение целевой функции с отрицательным коэффициентом. Это можно осуществить, перейдя к такому новому допустимому базисному решению, в котором эта переменная станет базисной и примет не нулевое, а положительное значение. Формальным признаком выбором такой переменной является знак «минус» перед свободной переменной в выражении целевой функции. В нашем случае это переменная х2. Однако, базисных переменных должно быть на каждом этапе решения задачи ровно 3, т.к. r=3. Чем больше будет значение переменной, тем меньше будет значение целевой функции, но система ограничений накладывает условия на рост переменной x2. Поскольку необходимо сохранить допустимость решений, т.е. все переменные должны остаться неотрицательными, то должны выполняться следующие неравенства (x5=0 как свободная переменная):
Формально оценочные отношения для x2 можно получить, составляя для каждого уравнения системы ограничения отношение свободного члена к коэффициенту при меняемой переменной, если меняемая переменная входит в выражение целевой функции со знаком « - »; если меняемая переменная не входит в уравнение или входит с положительным кооэффициентом, то это отношение заменяем символом ~. Очевидно, что сохранение неотрицательности всех переменных решения возможно, если не нарушается ни одна из полученных во всех уравнениях границ. В данном примере наибольшее возможное значение для переменной x2 определяется как x2=min{5, ~, 3}=3. При x2= 3 переменная x4 обращается в нуль и переходит в свободные. Уравнение, где достигается наибольшее возможное значение переменной, переводимой в базисные (т.е., где оценка минимальна), называется разрешающим. В данном случае – это третье уравнение. Разрешающее уравнение будем выделять рамкой в системе ограничений. 4. Решая последнее разрешающее уравнение, находим меняемую переменную х2 и подставляем ее в оставшиеся ограничения и в выражение целевой функции. Находим тем самым новое допустимое базисное решение. 2 этап: X1, х2, х3 - базисные, х4, х5 - свободные;
Проверяем можно ли " улучшить" решение, т.е. имеются ли в выражении целевой функции свободные переменные с отрицательными коэффициентами. В нашем случае таковых нет. Задача решена, построенное решение оптимально. Ответ: fmin = 1,
1. Постановка задачи в канонической форме. Построение исходного допустимого базисного решения. 2. Проверка критерия оптимальности. Если все свободные переменные входят в выражение целевой функции с положительными коэффициентами, то построенное решение оптимально, переходим к пункту 3. Построение нового допустимого базисного решения. 4. Конец. Доказано, что за конечное число шагов можно получить оптимальное решение.
Частный случай 1. Если на каком-то этапе решения ЗЛП в выражении целевой функции имеется свободная переменная с отрицательным коэффициентом, а во все уравнения системы ограничений она либо не входит, либо входит с положительным коэффициентом, то целевая функция не ограничена при данной системе ограничений. Оптимального решения нет. Частный случай 2. Если при переходе к оптимальному решению на последнем этапе симплекс-метода в выражении целевой функции исчезает хотя бы одна из свободных переменных, то полученное оптимальное решение не единственное. Чтобы получить другое решение, нужно сделать еще один шаг симплекс-метода и перевести в базисные исчезнувшую переменную. Задание для самостоятельной работы. Получить решение симплекс-методом задач предыдущего параграфа, иллюстрирующих частные случаи. |
Последнее изменение этой страницы: 2020-02-16; Просмотров: 115; Нарушение авторского права страницы

 ,
, 
 , б)
, б)  .
. , найдя точки её пересечения с осями координат A(5, 0) и B(0, -1) (рис.1).
, найдя точки её пересечения с осями координат A(5, 0) и B(0, -1) (рис.1).



 является вектор, который можно вычислить по формуле
является вектор, который можно вычислить по формуле
 перпендикулярен линиям уровня функции
перпендикулярен линиям уровня функции  ;
;  .
. — линейная функция, то ее линии уровня образуют семейство параллельных прямых, а вектором-градиентом является вектор
— линейная функция, то ее линии уровня образуют семейство параллельных прямых, а вектором-градиентом является вектор
 уровень только возрастает, а в направлении вектора
уровень только возрастает, а в направлении вектора  только убывает.
только убывает. и провести через начало координат линию уровня целевой функции, перпендикулярно вектору
и провести через начало координат линию уровня целевой функции, перпендикулярно вектору 













 Д(2, 0)
Д(2, 0)

 . Следовательно, для случая, когда число переменных не позволяет решить задачу графически, или это решение представляет технические сложности, можно решить задачу так: найти все допустимые базисные решения системы ограничений, вычислить значение целевой функции выбрать наибольшее и наименьшее. Однако, практическое осуществление столь «прозрачного» метода связано с большими вычислительными трудностями.
. Следовательно, для случая, когда число переменных не позволяет решить задачу графически, или это решение представляет технические сложности, можно решить задачу так: найти все допустимые базисные решения системы ограничений, вычислить значение целевой функции выбрать наибольшее и наименьшее. Однако, практическое осуществление столь «прозрачного» метода связано с большими вычислительными трудностями.

 ; r(
; r(  )=r(
)=r(  )=3.
)=3.







 .
. Блок-схема симплекс-метода.
Блок-схема симплекс-метода.