
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Вычисление корреляционной матрицы ошибок координат определяемых пунктов. ⇐ ПредыдущаяСтр 3 из 3
Корреляционная матрица ошибок необходимых параметров равна обратной матрице коэффициентов нормальных уравнений
Благодаря диагональной конструкции матрицы P формулу для вычисления коэффициентов нормальных уравнений представим в виде Учитывая, что
В результате вычислений получим:
матрицу где
Вычисление корреляционных матриц ошибок Дирекционных углов и длин сторон сети. Дирекционные углы и длины сторон геодезической сети являются функциями координат:
Корреляционные матрицы их ошибок в уравненной сети вычисляются по формулам:
Fa — матрица частных производных оцениваемых дирекционных углов; Fs — матрица частных производных оцениваемых длин сторон сети. Известно, что
где Производные
Матрица частных производных оцениваемых дирекционных углов (матрица Fa):
Матрица частных производных оцениваемых длин сторон (матрица Fs ):
После перемножения матриц
После перемножения матриц
Определение средней квадратической ошибки единицы веса.
Имея заданную точность определения дирекционных углов и длин сторон сети, а также корреляционные матрицы их ошибок По формулам:
вычисляются значения средней квадратической ошибки единицы веса. Из двух значений m выбирается наименьшее значение. В этих формулах
Для данной сети имеем:
для средней квадратической ошибки единицы веса необходимо установить значение равное 6, 78". Оно является максимально возможным из всех, которые могут доставить дирекционным углам и длинам сторон проектируемой сети требуемую точность. Определение случайной и систематической Средних квадратических ошибок измерений. За единицу веса принят вес измерения направлений. Известно, что угловые измерения сопровождаются случайными и систематическими ошибками. Поэтому среднюю квадратическую ошибку единицы веса представим в виде: где mD - средняя квадратическая случайная ошибка измерения направлений; md - средняя квадратическая систематическая ошибка измерения направлений. Влияние случайных ошибок ослабляется путем увеличения числа приемов. По экономическим соображениям число приемов ограничивается и доводится до определенного минимума, который позволяет свести случайные ошибки к пренебрегаемым величинам. Если
Отсюда находим:
В развиваемой сети случайная составляющая средней квадратической ошибки единицы веса должна быть равной:
Влияние систематических ошибок на точность измерений горизонтальных направлений в рассматриваемой сети не должно превосходить:
Требования к точности прибора и числу приемов. Величина
равными: где Тогда предельные ошибки будут равны: Предельные ошибки при проектировании измерений, как правило, определяются по формуле: Проектируемая сеть является сетью триангуляции. Значения горизонтальных направлений на пунктах триангуляции могут быть получены в результате измерения горизонтальных углов способом круговых приемов (способ Струве) и способом во всех комбинациях (способ Шрейбера). Предельные ошибки значений горизонтальных углов, полученных в результате многократных измерений будут равны: где Горизонтальные углы являются функциями равноточных направлений. Поэтому для рассматриваемой сети будем иметь:
предельная ошибка измерения горизонтальных углов составит:
Для обоснования требований к точности прибора и числу приемов рассмотрим величину:
где m — средняя квадратическая случайная ошибка измерений одним приемом, вычисляемая по результатам измерений (по формуле Бесселя). Величина T является случайной. Она имеет распределение Стьюдента. Функция распределения по закону Стьюдента выражает вероятность того, что случайная величина T принимает по абсолютной величине значения меньшие заданного Распределение Стьюдента зависит от числа степеней свободы r. Для измеряемых величин число степеней свободы определяется по формуле: r = n – 1, где n — количество приемов. Приняв определенное значение g и задавая степень свободы r по таблице Стьюдента можно найти . Отсюда следует:
Степень свободы подбирается такой, чтобы точность измерения одним приемом m и число приемов n = r + 1 были приемлемы при производстве наблюдений на пунктах сети. По величине mопределяется класс прибора, обеспечивающий данную точность измерений одним приемом: mп < m, где mп — паспортное значение средней квадратической ошибки измерения одним приемом. Значение g должно назначаться примерно равным единице. Если взять, например, g= 0, 9 — то в десяти случаях из ста могут оказаться незамеченными измерения, для которых случайная ошибка среднего арифметического значения будет больше предельной, т.е. 10% некачественных измерений будут приняты в обработку. При g = 0, 99 только 1% некачественных измерений будет незамеченным. Обычно gпринимается равным 0, 995; 0, 997; 0, 999. Примем g = 0, 999. По таблице распределения Стьюдента для r = 2 находим n = r + 1 = 3. Среднюю квадратическую ошибку измерения угла одним приемом вычислим по формуле Таким образом, чтобы получить значения горизонтальных углов с точностью Для r = 3 будем иметь n = r + 1 = 4; требуемую точность измерений может обеспечить теодолит Т1. Следовательно, значения горизонтальных углов с точностью Для r = 5 будем иметь n = r + 1 = 6;
требуемую точность измерений может обеспечить теодолит Т2. Следовательно, значения горизонтальных углов с точностью Шестью приемами.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-17; Просмотров: 184; Нарушение авторского права страницы
 .
.
 и в рассматриваемой сети не планируются измерения азимутов и длин сторон, корреляционная матрица ошибок необходимых параметров будет равна
и в рассматриваемой сети не планируются измерения азимутов и длин сторон, корреляционная матрица ошибок необходимых параметров будет равна .
. =
= можно разбить на блоки
можно разбить на блоки 
 — корреляционная матрица ошибок уравненных значений ориентирующих углов;
— корреляционная матрица ошибок уравненных значений ориентирующих углов;  —матрица взаимных весовых коэффициентов между уравненными значениями ориентирующих углов и уравненными значениями координат определяемых пунктов;
—матрица взаимных весовых коэффициентов между уравненными значениями ориентирующих углов и уравненными значениями координат определяемых пунктов;  — корреляционная матрица ошибок координат определяемых пунктов.
— корреляционная матрица ошибок координат определяемых пунктов.
 x=
x=

 ,
, 
 ,
,  ,
,  и
и  — модельные значения дирекционных углов и длин сторон проектируемой сети.
— модельные значения дирекционных углов и длин сторон проектируемой сети. ,
,  ,
,  и
и  равны
равны ,
, 
 ,
,  .
.




 получим искомую корреляционную матрицу ошибок дирекционных углов
получим искомую корреляционную матрицу ошибок дирекционных углов  :
:  получим корреляционную матрицу ошибок длин сторон
получим корреляционную матрицу ошибок длин сторон  :
:  и
и  можно подобрать такое максимальное значение m , которое доставит определяемым величинам заданную точность. Для этого в корреляционных матрицах
можно подобрать такое максимальное значение m , которое доставит определяемым величинам заданную точность. Для этого в корреляционных матрицах  и
и  ;
; 
 и
и  означают требуемые точности определения дирекционных углов и длин сторон сети.
означают требуемые точности определения дирекционных углов и длин сторон сети. =6, 77˝
=6, 77˝  =6, 78˝
=6, 78˝  ,
,  , то влияние случайных ошибок на результаты измерений будет незначительным по сравнению с влиянием систематических ошибок. Определим случайную составляющую средней квадратической ошибки единицы веса. Для этого примем
, то влияние случайных ошибок на результаты измерений будет незначительным по сравнению с влиянием систематических ошибок. Определим случайную составляющую средней квадратической ошибки единицы веса. Для этого примем  . Тогда:
. Тогда:  .
. .
. =2, 14
=2, 14 
 определяет, с какой средней квадратической случайной ошибкой должны быть получены в результате многократных измерений элементы геодезической сети. Она позволяет установить для них предельные ошибки
определяет, с какой средней квадратической случайной ошибкой должны быть получены в результате многократных измерений элементы геодезической сети. Она позволяет установить для них предельные ошибки  . Для установления значения
. Для установления значения  обычно назначают вероятности выполнения неравенства
обычно назначают вероятности выполнения неравенства
 — случайная ошибка среднего арифметического значения измеряемой величины.
— случайная ошибка среднего арифметического значения измеряемой величины.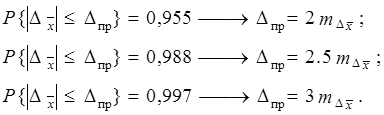
 .
. ,
,  — проектное значение средней квадратической случайной ошибки измерения горизонтальных углов.
— проектное значение средней квадратической случайной ошибки измерения горизонтальных углов. =5, 07
=5, 07 =4, 53
=4, 53 ,
, 
 .
. . Ему должна соответствовать величина:
. Ему должна соответствовать величина: 
 .
. = 31.6. Из выражения r = n – 1 определяем число приемов
= 31.6. Из выражения r = n – 1 определяем число приемов .
.  =3, 03", необходимо выполнить два приема. Причем точность измерения в приеме должна быть равной m = 0, 42" . Средняя квадратическая ошибка измерения углов одним приемом теодолитом Т1 равна 1"; теодолитом Т2 — 2". Как видим, технические возможности приборов не могут обеспечить необходимую точность измерений.
=3, 03", необходимо выполнить два приема. Причем точность измерения в приеме должна быть равной m = 0, 42" . Средняя квадратическая ошибка измерения углов одним приемом теодолитом Т1 равна 1"; теодолитом Т2 — 2". Как видим, технические возможности приборов не могут обеспечить необходимую точность измерений. .
.  можно получить в результате измерений теодолитом Т1, выполняя измерения в 4-ре приема.
можно получить в результате измерений теодолитом Т1, выполняя измерения в 4-ре приема. .
.