
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Математическое описание функционирования воздушно-динамического привода
Состояние физического тела — однородного газа — в некотором проточном объёме Wi в каждый момент времени характеризуется совокупностью следующих параметров: - давления Pi - удельного веса γ i - температуры Ti. Для этого газа, полагая его идеальным, справедливо уравнение состояния:
Из этого уравнения следует, что независимых величин, характеризующих состояние газа в проточной полости, две. В термодинамике для их определения используются два закона: - закон сохранения энергии; - закон сохранения массы. Принимаем допущения о том, что параметры газа являются медленно меняющимися по сравнению с изменением сигналов управления. Это позволяет разбить уравнение нелинейной нестационарной модели привода на две группы уравнений: - уравнения с медленно меняющимися координатами; - уравнения с быстро меняющимися координатами. Учитывая выше изложенное, применим для описания функционирования привода законы сохранения энергии. Расчетная схема канала РП представлена на рисунке 1.3.1
Рис 1.3.1 Расчетная схема рулевого привода
Закон сохранения энергии можно записать в следующем виде: - для полости теплоотборника
- для рабочей полости
- для полости отсека
Закон сохранения массы: -для полости теплоотборника
- для рабочей полости
- для полости отсека
Удельный приход (расход) энергии находим по зависимостям:
Массовый секундный приход (расход) газа в рабочей полости определяется по формулам:
Функции режима течения определяются по формулам:
Математическое описание двигателя включает а себя еще и уравнения, полученные из уравнения состояния. Они имеют вид: - для полости теплоотборника
- для рабочей полости
- для полости отсека
С учетом теплообмена будем иметь следующие зависимости: -для стенок теплоотборника
- для стенок рабочей полости
- для стенок отсека
Механическая подсистема описывается следующими уравнениями:
Эффективные сечения входного и выходного отверстий распределительного устройства типа «струйная трубка» с достаточной для инженерной практики точностью можно описать с помощью полинома первой степени. - для входного сечения:
- для выходного сечения:
Используя выражение для параметров
тогда:
где Полное нелинейное математическое описание (МО) исполнительного механизма имеет вид:
1.
2.
3.
4.
5.
7.
8.
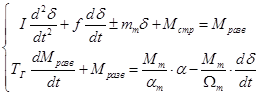
Математическое описание исполнительного механизма будет иметь следующий вид:
где Тг = где Тум - постоянная времени управляющего электромагнита; ζ - коэффициент колебательности; kум - коэффициент аппроксимации; Ubx - напряжение входного сигнала; PПi - давление в полостях привода; k - показатель адиабаты; Пто - удельный расход энергии в теплоотборнике; Gto - удельный массовый секундный расход рабочего тела в теплоотборнике; ПП1, 2 - удельный расход энергии в рабочих полостях; GП1, 2 - удельный массовый секундный расход рабочего тела в полостях; SП - площадь поршня; 1 - плечо; δ, δ m - угол поворота и максимальный угол поворота рулей; W1, 2 - объем рабочих полостей; ТП1, 2 - температура рабочего тела в полостях; γ П1, 2 - удельный вес рабочего тела в полостях; R - универсальная газовая постоянная; I∑ - приведенный суммарный момент инерции подвижных частей; f - коэффициент вязкого трения; mш(δ ) - жесткость шарнирной нагрузки; Мстр - момент сухого трения; kо - газодинамический коэффициент; PТО - давление в ресивере; YП1, 2, YТО1, 2 - газодинамические функции режима течения; µSbx1, 2, µSbыx1, 2- эффективные площади втекания и истечения в рабочих полостях; Pо - давление в отсеке; с - коэффициент, характеризующий регулируемое втекание; α, α m - угол поворота и максимальный угол поворота якоря управляющего электромагнита; α, α у - коэффициенты, характеризующие регулируемое истечение. Структурная схема исполнительного механизма будет иметь следующий вид:
Рис 1.3.2 Структурная схема исполнительного механизма. 1.4 Расчет первоначального варианта ВДРП
Проанализируем диапазон чисел Маха на участке управляемого полета: М= 1, 1÷ Кб; В таблице 1.1 отражена зависимость коэффициента
Таблица 1.1
Значения коэффициента подъемной силы cn = f (M, α эф) и относительного положения центра давления xd = f (α эф, М) приведены, соответственно, в таблицах 1.2 и 1.3 Таблица 1.2 коэффициент сп
Выбираем положение оси вращения руля:
Хов = (0, 05 ÷ 0, 1) - (Xdmax - Xdmin) + Xdmin
Значение хов= 52 мм
Рассчитаем значения шарнирных нагрузок по зависимости:
где q = 0, 725 М2; вр - аэродинамическая хорда; вр = 86 мм; Sxap - площадь сечения ракеты; S xap = 28, 27 см2; сп - коэффициент подъемной силы; xd - относительное положение центра давления;
Значения шарнирных нагрузок приведены в таблице 1.4
Таблица 1.4 значения шарнирных нагрузокМн[кгсм]
Зависимость шарнирных нагрузок от чисел Маха и от эффективных углов Рассчитаем значения избыточных давлений при соответствующих числах Маха по зависимости:
при при Определим изменения параметра
где
сп - коэффициент подъемной силы, хов - положение оси вращения руля, хd - относительное положение центра давления, М - число Маха. Рассчитаем значение энергетической функции, которая характеризует отношение мощности потребной и мощности развиваемой:
где Nпотр=
где fвp - частота вращения, Гц Мн - момент нагрузки, Yn - газодинамическая функция расхода, Т - температура газа в рабочей полости. Все данные, рассчитанные по выше изложенным зависимостям, представлены в таблицах 1.5-1.8.
Таблица 1.5
Таблица 1.6
Таблица 1.7
Таблица 1.8
Из полученных расчетных данных определим режимы полета, на которых будем в дальнейшем производить расчеты конструктивных и обобщенных параметров, проводить тепловой расчет. Конструктивный расчет Snl будем определять на режиме, где параметр kσ, характеризующий соотношения момента нагрузки и развиваемого момента имеет экстремум.
kσ = 0, 0098 при
Расчет потребной скорости будем проводить на режиме, где энергетическая функция сэ имеет экстремум, или, другими словами, где потребная мощность максимально приближена к развиваемой мощности привода.
сэ= 11, 57 при 0 = 70°, Т =-50° С, t = 5, 8 с. Тепловой расчет будем проводить на режиме, где достигается максимальная скорость полета: |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-16; Просмотров: 146; Нарушение авторского права страницы
 (1.3.1)
(1.3.1)
 ; (1.3.2)
; (1.3.2) ; (1.3.3)
; (1.3.3) (1.3.4)
(1.3.4) ; (1.3.5)
; (1.3.5) (1.3.6)
(1.3.6) (1.3.7)
(1.3.7)
 (1.3.8)
(1.3.8)

 (1.3.10)
(1.3.10)


 (1.3.11)
(1.3.11)



 при
при 
 ;
;  ; (1.3.12)
; (1.3.12) (1.3.13)
(1.3.13) (1.3.14)
(1.3.14) ; (1.3.15)
; (1.3.15) ; (1.3.16)
; (1.3.16) ; (1.3.17)
; (1.3.17)
 (1.3.18)
(1.3.18) ; (1.3.19)
; (1.3.19) .
. ; (1.3.20)
; (1.3.20) .
. можно записать:
можно записать:  ;
;  ;
;  ;
;  ; где
; где  ;
;  и
и  - соответственно, фактический и максимальный углы поворота распределителя.
- соответственно, фактический и максимальный углы поворота распределителя.










 (1.3.21)
(1.3.21)


 от чисел Маха:
от чисел Маха: 

 (1.4.2)
(1.4.2) приведены на рисунке 1.4.1.
приведены на рисунке 1.4.1. ; (1.4.3)
; (1.4.3) , Рст = 1 ат;
, Рст = 1 ат;  , Рст = f(H, T);
, Рст = f(H, T);  характеризующего соотношение момента нагрузки и развиваемого приводом момента:
характеризующего соотношение момента нагрузки и развиваемого приводом момента:  ; (1.4.4)
; (1.4.4) ;
;  - избыточное давление,
- избыточное давление,  ;
;  ,
,  - потребная скорость;
- потребная скорость;  - потребный момент;
- потребный момент;  - максимальный момент;
- максимальный момент;  - максимальная скорость;
- максимальная скорость;  (1.4.5)
(1.4.5) , Т = +50°С
, Т = +50°С , Т = -50°С
, Т = -50°С , Т = +50°С
, Т = +50°С , T = -5O°C, t = O, 6 c.
, T = -5O°C, t = O, 6 c.