
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Динамический синтез рычажного механизма по коэффициенту неравномерности ходаСтр 1 из 3Следующая ⇒
Содержание
Введение. . Динамический синтез рычажного механизма по коэффициенту неравномерности хода. Данные: Определение недостающего размера кинематической схемы. Определение для двенадцати равноотстоящих положений ведущего звена положения звеньев, шарниров и центров масс звеньев. Определение приведенного момента инерции звеньев механизма. 1.5 Определение приведенного момента сил. 1.6 Определение работы сил производственного сопротивления и работы движущих сил. Определение изменения кинетической энергии звеньев механизма без маховика. Определение момента инерции маховика. . Силовой анализ рычажного механизма. Определение линейных и угловых скоростей звеньев. Определение линейных и угловых ускорений звеньев. Определение инерционной нагрузки звеньев. Определение реакций во всех кинематических парах механизма. Кинематическая пара звеньев 4, 5. Кинематическая пара 2, 3. Кинематическая пара 0, 1. Построение рычага Жуковского. . Эвольвентное зацепление Расчёт зубчатых колёс Проверка качества зацепления Заключение: Библиография Введение Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд человека, а также обеспечивающих средства исследования законов природы. Курсовая работа является первой самостоятельной работой, направленной на конкретном решение задач в области конструирования машин. Она позволяет закрепить основные положения теории машин и общие методы кинематического и динамического анализа и синтеза механизмов. Динамический синтез рычажного механизма по коэффициенту неравномерности хода Данные
m5=6, 5кг; n1=150об/мин; F2=150H; d=0, 05. Определение недостающего размера кинематической схемы Недостающим размером данной схемы является длина ведущего звена. Для его определения принимаем положение звена 3 в крайнем правом положении, при этом угол между ведущим звеном 1 и звеном 3 будет равен 900. Отсюда следует, что длина звена 1 может быть определена по формуле:
Длину звена 3 определим из того же положения механизма:
Определение для двенадцати равноотстоящих положений ведущего звена положения звеньев, шарниров и центров масс звеньев
Положение звена 2 определяется положением его центра, который совпадает с точкой А ведущего звена и определяется по формуле:
Полученные результаты расчетов пункта 1.3 показаны в таблице 1. Составим уравнения замкнутого векторного контура. Из рисунка 1.2 имеем:
При проецировании на оси координат получим:
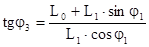
Из уравнений (1.3.1) и (1.3.2) определим угол j3:
После дифференцирования уравнений (1.3.1) и (1.3.2) по обобщенной координате j1, имеем:
где
В уравнениях (1.3.3) и (1.3.4) из всех углов под знаками тригонометрических функций вычтем угол j3:
Из формулы(1.3.6) выражаем аналог угловой скорости звена 3:
Значение L2 получаем по следующей формуле, выраженной из уравнения (1.3.1):
Скорость точки А2 и угловая скорость звена 3 определяются как:
Координаты центра масс звена 3 определяются как:
Величина проекции аналога скорости точки S3 на оси координат определяются из уравнений:
Проекции скорости звена 3 определятся как:
Величина скорости центра масс S3 будет тогда равна:
Угол aX3 между вектором VS3 и осью Х находится из уравнения:
Составим уравнения второго замкнутого векторного контура Проецируя уравнение
Из уравнения (1.3.19) получаем, что:
Дифференцируем уравнение (1.3.20):
где Скорость точки В4 определится из уравнения:
Продифференцировав уравнение (1.3.18), получили:
Упрощаем данное уравнение, подставляя в него уравнение (1.3.20):
где Скорость звена 5 найдется как:
Таблица 1: Результаты расчетов по пункту 1.3
Силовой анализ рычажного механизма
Динамический анализ проведем для такого положения механизма, когда угол j1 будет равен 300.
Определение реакций во всех кинематических парах механизма Кинематическая пара 2, 3 Момент сил, относительно О2 равен 0:
МИ3 - G3h3 - PИ3h1 - R12h2 + R43h4=0 (2.4.2.1)
где МИ3 - момент инерции звена 3; G3 - вес звена 3; h1, h2, h3, h4 - соответствующие плечи сил инерции, реакции звена 1 на звено 2, веса звена 3, реакции звена 4 на звено 3. Вес звена 3 определится по формуле:
G3=m3 g=49 Н.
Из уравнения (2.4.2.1) выражается величина R12:
R12= 212, 26 Н.
Знак минус говорит о том, что реакция направлена в противоположном направлении. Сумма сил, действующих на звено 3:
Производя построение замкнутого векторного контура, определяем реакцию R03: R03=110 Н.
Кинематическая пара 0, 1 Для сохранения положения равновесия ведущего звена прикладывается уравновешивающая сила РУ и записывается уравнение моментов сил относительно точки О1:
SМ01=0; Þ - R21 h1 + PУ LO1A=0 (2.4.3.1)
где h1 - плечо реакции R21. Плечо h1 находится по формуле:
h1=LO1A sin(480)=0, 037 м.
Из уравнения (2.4.3.1) находим РУ:
Эвольвентное зацепление
Z1 =13, Z2 =19- числа зубьев колёс m = 10 мм- модуль зацепления h*a = 1- коэффициент высоты головки зуба h*l = 2- коэффициент граничной высоты зуба с* = 0, 25- коэффициент радиального зазора 200- угол профиля исходного контура x1= 0, 45- коэффициент смещения шестерни x2= 0, 4125- коэффициент смещения колеса
Расчёт зубчатых колёс
Делительный диаметр Шестерни Колеса d 1 = 130 мм d 2 = 190 мм
Начальный диаметр Шестерни Колеса dW 1 = 136, 06 мм dW 2 = 198, 85 мм
Коэффициент уравнительного смещения
Диаметр основной окружности Шестерни Колеса dB 1 = 122, 16 мм dB 2 = 178, 54 мм
Толщина зуба по делит. окружности Шестерни Колеса S1= 18, 98 мм S2= 18, 71 мм
Заключение В результате выполнения данной курсовой работы мы закрепим и обобщим знания и навыки, полученные при изучении дисциплины, научились применять на практике теорию курса (кинематику, динамику, синтез эвольвентного зацепления), методы для исследования различных кинематических схем, механизмов и машин различных типов. Библиография 5. Артоболевский И.И. Теория механизмов и машин.-М.; Наука, 1988. 6. Зиновьев В.А. Курс теории механизмов и машин.-М.; Наука, 1972. 7. Теория механизмов и машин: Учебник для втузов / Под ред. К.В. Фролова.-М.; Высшая школа, 1987. Содержание
Введение. . Динамический синтез рычажного механизма по коэффициенту неравномерности хода. Данные: Определение недостающего размера кинематической схемы. Определение для двенадцати равноотстоящих положений ведущего звена положения звеньев, шарниров и центров масс звеньев. Определение приведенного момента инерции звеньев механизма. 1.5 Определение приведенного момента сил. 1.6 Определение работы сил производственного сопротивления и работы движущих сил. Определение изменения кинетической энергии звеньев механизма без маховика. Определение момента инерции маховика. . Силовой анализ рычажного механизма. Определение линейных и угловых скоростей звеньев. Определение линейных и угловых ускорений звеньев. Определение инерционной нагрузки звеньев. Определение реакций во всех кинематических парах механизма. Кинематическая пара звеньев 4, 5. Кинематическая пара 2, 3. Кинематическая пара 0, 1. Построение рычага Жуковского. . Эвольвентное зацепление Расчёт зубчатых колёс Проверка качества зацепления Заключение: Библиография Введение Развитие современной науки и техники неразрывно связано с созданием новых машин, повышающих производительность и облегчающих труд человека, а также обеспечивающих средства исследования законов природы. Курсовая работа является первой самостоятельной работой, направленной на конкретном решение задач в области конструирования машин. Она позволяет закрепить основные положения теории машин и общие методы кинематического и динамического анализа и синтеза механизмов. Динамический синтез рычажного механизма по коэффициенту неравномерности хода Данные
m5=6, 5кг; n1=150об/мин; F2=150H; d=0, 05. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2020-02-17; Просмотров: 49; Нарушение авторского права страницы
 S3=0, 1кг/м2;
S3=0, 1кг/м2; 


 .
.
 .
.
 - аналог скорости точки А3;
- аналог скорости точки А3;  - аналог угловой скорости звена 3.
- аналог угловой скорости звена 3.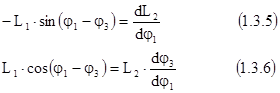
 .
.






 , получаем:
, получаем: 

 ,
,  - аналог скорости точки В4.
- аналог скорости точки В4. .
.

 - аналог скорости звена 5.
- аналог скорости звена 5. .
.
 151, 97 Н.
151, 97 Н.







 a = 160
a = 160

 y= 0, 1161
y= 0, 1161








