
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Описание технологической схемы кран-балкиСтр 1 из 3Следующая ⇒
ИЖЕВСКАЯ ГОСУДАРСТВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ АКАДЕМИЯ
Кафедра «Автоматизированного электропривода»
КУРСОВОЙ проект тема: «Электропривод кран-балки»
Выполнил: студент 451 группы Ворожцов Ю.А.
Принял: Владыкин И.Р.
Ижевск 2005
Содержание
Задание……………..…………………………………...………………………4 1.Описание технологической схемы кран-балки…...………..………………5 2. Выбор частоты вращения двигателя и технических данных редуктора…………………………...6 3.Расчет и построение нагрузочной диаграммы и механической характеристики рабочей машины………………………7 4. Предварительный выбор двигателя по мощности и режиму нагрузки…………………………...11 5. Определение приведенного момента инерции системы двигатель-рабочая машина…..…………………..12 6. Расчет и построение нагрузочной диаграммы двигателя за один цикл работы машины………………………13 7. Проверка выбранного двигателя по перегрузочной способности, пусковому моменту и частоте вращения………………..14 8. Обоснование и описание принципиальной схемы управления приводом кран-балки…………………….15 9. Выбор аппаратуры управления и защиты………………………………..16 10.Краткое описание устройства и места расположения электрооборудования кран-балки…………………….18 11. Подсчет стоимости выбранного комплекта электрооборудования…………………………..19 12. Спецификация……………………………………………………………20 13. Определение устойчивости выбранной автоматической СУ 13.1.Построение функциональной схемы……………………………...21 13.2.Построение структурной схемы для расчета статики….........…...21 13.3.Расчет динамики……………………………………………………24 14. Приложение………………………………………………………………29 15. Заключение……………………………………………………………….33 16. Литература………………………………………………………………..34
Механизация, электрификация и автоматизация – ключи к интенсификации сельского хозяйства. Важная роль в реализации планов электрификации и механизации сельскохозяйственного производства отводится электроприводу – основному виду привода самых разнообразных машин и механизмов. Более 60% вырабатываемой в стране электроэнергии потребляется электроприводом. Основные достоинства электропривода: малый уровень шума при работе и отсутствие загрязнения окружающей среды, широкий диапазон мощностей (от сотых долей ватта до десятков тысяч киловатт) и угловых скоростей вращения (от долей оборота вала в минуту до нескольких сотен тысяч оборотов в минуту), доступность регулирования угловой скорости вращения, высокий КПД, легкость автоматизации и простота эксплуатации.
Первостепенное значение для автоматизации производства имеют многодвигательный привод и средства электрического управления. Развитие электропривода идет по пути упрощения механических передач и приближение электродвигателей к рабочим органам машин и механизмов, а также возрастающего применения электрического регулирования скорости приводов. Широко внедряются комплектные тиристорные преобразовательные устройства. Применение тиристорных преобразователей не только позволило создать высокоэкономичные регулируемые электроприводы постоянного тока, но и открыть большие возможности для использования частотного регулирования двигателей переменного тока, в первую очередь наиболее простых и надежных асинхронных двигателей с короткозамкнутым ротором.
Автоматизация различных технологических электроустановок, используемых в сельском хозяйстве, позволяет повысить надежность и увеличить срок службы технологического оборудования, облегчить и улучшить условия труда работающих, увеличить производительность и повысить качество работы оборудования.
В современных условиях эксплуатация электрооборудования требует глубоких и разносторонних знаний, а задачи создания нового или модернизации существующего электрифицированного технологического агрегата, механизма или устройства решаются совместными усилиями технологов, механиков и электриков.
2 1
Рис.1. Схема устройства кран-балки
Кран-балка предназначена для работы в ремонтно-механической мастерской. Она состоит из балки 1, передвигаемой вдоль цеха, и тельфера 2, служащего для подъема, опускания и попеременного перемещения груза (рис.1). Максимальная масса поднимаемого груза m=1000 кг; масса тельфера 900 кг; масса балки 2900 кг; скорость подъема груза 10 м/мин; скорость передвижения тельфера 20 м/мин, балки 50 м/мин; максимальная высота подъема груза 8 м; длина пролета балки 10 м; длина цеха L=100 м; диаметр ходовых колес балки 450 мм, тельфера 400 мм; диаметр цапф колес тельфера и балки 60 мм; диаметр барабана тельфера 400 мм; коэффициент трения качения колес балки fб =0, 0005, тельфера fт =0, 0003; коэффициент трения в цапфах m = 0, 015; коэффициент, учитывающий сопротивления в ребрах колес, торцах ступиц и т. д. а =2, 5. Привод механизма передвижения балки, подъема груза и передвижения тельфера осуществляется от отдельных электродвигателей через редукторы. Среднее число циклов в час равно 20 при средней длине перемещения тельфера и балки. Спуск груза производится в режиме сверхсинхронного торможения. Питание энергией двигателей производится от троллейных проводов. Пусковая и защитная аппаратура установлена на кран-балке. Требования к схеме автоматического управления 1. Управление привода кран-балки осуществляется вручную – дистанционно с места подъема груза. Двигатель тельфера включен только при нажатой кнопке управления. 2. Путь перемещения всех механизмов ограничивается конечными выключателями. 3. При отключении двигателей включаются с помощью электромагнитов механические тормоза. 4. Все приводы должны иметь защиту от токов короткого замыкания и самопроизвольного пуска.
Расчет автоматики Рисунок 13.1 Функциональная схема кран-балки NS – орган управления исполнительным механизмом; ЕС – тахогенератор установленный на двигателе механизма подъема (барабана); SC – микроконтроллер, управляющий двигателем механизма подъема; НS – ручное управление исполнительными механизмами; SQ – конечные выключатели для ограничения перемещения. Рисунок 13.2 Первоначальная схема. Для расчета статики, необходимо исходную схему привести к простейшей.
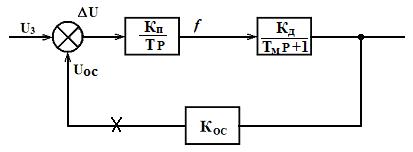
КП – коэффициент преобразователя; КОС – коэффициент обратной связи; КД1 – коэффициент двигателя. Рисунок 13.3 Расчетная схема
Так как
Представим элементы системы в виде типовых динамических звеньев и определим их основные параметры. Передаточная функция
Электромеханическая постоянная
значок (Х) показывает, что схема выглядит разомкнутой.
Рисунок 13.4 Структурная схема для расчета динамики В разомкнутой системе
Построим ЛФЧХ и ЛАЧХ для определения устойчивости

Рис 13.5 Определение устойчивости
Построение вещественно частотной характеристики, построим для замкнутой САР. Для рисунка она будет иметь следующий вид:
Подставим в
Построим зависимость
Рисунок 13.6 Аппроксимация графика Определим
Зависимости Переходный процесс представляет из себя зависимость Время переходного процесса (реальное):
По таблице h функции получим переходную характеристику, переходной характеристикой 2-й трапеции можно пренебречь, в виду ее малой начальной ординаты и почти одинакового показателя Таблица 5 – Таблица h функций и значения времени для построения графика переходного процесса
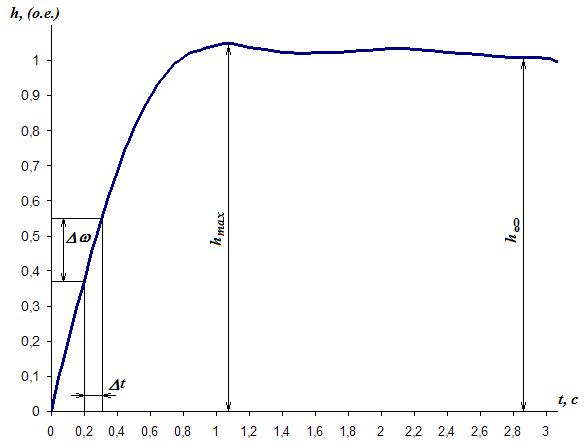
На графике h в относительных единицах, а время (t) в реальном масштабе
Величина перерегулирования
N=2 – количество колебаний. Фактическое значение максимального момента
где:
Рисунок 13.7 График переходного процесса при регулировании скорости электродвигателя,
Литература
1. 2. Кисаримов Р.А. Справочник электрика.- 2-е изд., перераб. и доп.- М.: ИП РадиоСофт, 2004. - 512с. 3. Контрольно-измерительные приборы и средства автоматизации: каталог продукции фирмы «ОВЕН». - М.: СинФазИн, 2003. – 152с. 4. Кондратьева Н.П. «Выбор аппаратуры управления электрических установок. Учебное пособие» - ИжГСХА, Ижевск, 1995 – 140с. 5. Правила устройства электроустановок.7-е изд. Доп. с исправлениями.- М.: ЗАО «Энергосервис», 2003.-608с. 6. Межотраслевые правила по охране труда при эксплуатации электроустановок.- М.: Изд-во НЦЭНАС, 2003-192с. 7. Правила технической эксплуатации электроустановок потребителей.-М.: Изд-во «Энергосервис», 2001-287с. 8. Фоменков А.П. Электропривод сельскохозяйственных машин, агрегатов и поточных линий. - 2-е изд., перераб. и доп.- М.: Колос, 1984. – 288с.
Приложение
1 – барабан; 2 – тельфер; 3 – балка Рисунок 1 Схема устройства кран – балки
1 – двигатель; 2 – муфта; 3 – редуктор; 4 – муфта; 5 – трансмиссионный вал; 6 – колесо балки
Рисунок 2 Кинематическая схема механизма передвижения балки
1 – двигатель; 2 – редуктор; 3 – барабан; 4 – крановая подвеска; 5 – трос
Рисунок 3 Кинематическая схема механизма подъема и опускания груза
Рисунок 4Механическая характеристика рабочей машины
Рисунок 5 Механическая характеристика двигателя. (Естественная и Рисунок 6 Принципиальная схема управления
Основная задача проектирования рационального электропривода состоит в том чтобы наиболее правильно сочетать свойства всех его элементов со свойствами рабочей машины и технологического процесса, выполняемого машинным устройством. Первостепенное значение для автоматизации производства имеют многодвигательный привод и средства электрического управления. Развитие электропривода идет по пути упрощения механических передач и приближение электродвигателей к рабочим органам машин и механизмов, а также возрастающего применения электрического регулирования скорости приводов. Широко внедряются комплектные тиристорные преобразовательные устройства. Применение тиристорных преобразователей не только позволило создать высокоэкономичные регулируемые электроприводы постоянного тока, но и открыть большие возможности для использования частотного регулирования двигателей переменного тока, в первую очередь наиболее простых и надежных асинхронных двигателей с короткозамкнутым ротором.
Свойства технологического процесса и рабочей машины, знание которых необходимо для проектирования электропривода, описываются приводными характеристиками машины. К этим характеристикам относятся: технологическая, кинематическая, энергетическая, механическая, нагрузочная. После внимательного изучения технологической, кинематической характеристик машины и требований к схеме автоматического управления составляется принципиальная схема автоматического управления. ИЖЕВСКАЯ ГОСУДАРСТВЕННАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ АКАДЕМИЯ
Кафедра «Автоматизированного электропривода»
КУРСОВОЙ проект тема: «Электропривод кран-балки»
Выполнил: студент 451 группы Ворожцов Ю.А.
Принял: Владыкин И.Р.
Ижевск 2005
Содержание
Задание……………..…………………………………...………………………4 1.Описание технологической схемы кран-балки…...………..………………5 2. Выбор частоты вращения двигателя и технических данных редуктора…………………………...6 3.Расчет и построение нагрузочной диаграммы и механической характеристики рабочей машины………………………7 4. Предварительный выбор двигателя по мощности и режиму нагрузки…………………………...11 5. Определение приведенного момента инерции системы двигатель-рабочая машина…..…………………..12 6. Расчет и построение нагрузочной диаграммы двигателя за один цикл работы машины………………………13 7. Проверка выбранного двигателя по перегрузочной способности, пусковому моменту и частоте вращения………………..14 8. Обоснование и описание принципиальной схемы управления приводом кран-балки…………………….15 9. Выбор аппаратуры управления и защиты………………………………..16 10.Краткое описание устройства и места расположения электрооборудования кран-балки…………………….18 11. Подсчет стоимости выбранного комплекта электрооборудования…………………………..19 12. Спецификация……………………………………………………………20 13. Определение устойчивости выбранной автоматической СУ 13.1.Построение функциональной схемы……………………………...21 13.2.Построение структурной схемы для расчета статики….........…...21 13.3.Расчет динамики……………………………………………………24 14. Приложение………………………………………………………………29 15. Заключение……………………………………………………………….33 16. Литература………………………………………………………………..34
Механизация, электрификация и автоматизация – ключи к интенсификации сельского хозяйства. Важная роль в реализации планов электрификации и механизации сельскохозяйственного производства отводится электроприводу – основному виду привода самых разнообразных машин и механизмов. Более 60% вырабатываемой в стране электроэнергии потребляется электроприводом. Основные достоинства электропривода: малый уровень шума при работе и отсутствие загрязнения окружающей среды, широкий диапазон мощностей (от сотых долей ватта до десятков тысяч киловатт) и угловых скоростей вращения (от долей оборота вала в минуту до нескольких сотен тысяч оборотов в минуту), доступность регулирования угловой скорости вращения, высокий КПД, легкость автоматизации и простота эксплуатации.
Первостепенное значение для автоматизации производства имеют многодвигательный привод и средства электрического управления. Развитие электропривода идет по пути упрощения механических передач и приближение электродвигателей к рабочим органам машин и механизмов, а также возрастающего применения электрического регулирования скорости приводов. Широко внедряются комплектные тиристорные преобразовательные устройства. Применение тиристорных преобразователей не только позволило создать высокоэкономичные регулируемые электроприводы постоянного тока, но и открыть большие возможности для использования частотного регулирования двигателей переменного тока, в первую очередь наиболее простых и надежных асинхронных двигателей с короткозамкнутым ротором.
Автоматизация различных технологических электроустановок, используемых в сельском хозяйстве, позволяет повысить надежность и увеличить срок службы технологического оборудования, облегчить и улучшить условия труда работающих, увеличить производительность и повысить качество работы оборудования.
В современных условиях эксплуатация электрооборудования требует глубоких и разносторонних знаний, а задачи создания нового или модернизации существующего электрифицированного технологического агрегата, механизма или устройства решаются совместными усилиями технологов, механиков и электриков.
2 1
Рис.1. Схема устройства кран-балки
Кран-балка предназначена для работы в ремонтно-механической мастерской. Она состоит из балки 1, передвигаемой вдоль цеха, и тельфера 2, служащего для подъема, опускания и попеременного перемещения груза (рис.1). Максимальная масса поднимаемого груза m=1000 кг; масса тельфера 900 кг; масса балки 2900 кг; скорость подъема груза 10 м/мин; скорость передвижения тельфера 20 м/мин, балки 50 м/мин; максимальная высота подъема груза 8 м; длина пролета балки 10 м; длина цеха L=100 м; диаметр ходовых колес балки 450 мм, тельфера 400 мм; диаметр цапф колес тельфера и балки 60 мм; диаметр барабана тельфера 400 мм; коэффициент трения качения колес балки fб =0, 0005, тельфера fт =0, 0003; коэффициент трения в цапфах m = 0, 015; коэффициент, учитывающий сопротивления в ребрах колес, торцах ступиц и т. д. а =2, 5. Привод механизма передвижения балки, подъема груза и передвижения тельфера осуществляется от отдельных электродвигателей через редукторы. Среднее число циклов в час равно 20 при средней длине перемещения тельфера и балки. Спуск груза производится в режиме сверхсинхронного торможения. Питание энергией двигателей производится от троллейных проводов. Пусковая и защитная аппаратура установлена на кран-балке. Требования к схеме автоматического управления 1. Управление привода кран-балки осуществляется вручную – дистанционно с места подъема груза. Двигатель тельфера включен только при нажатой кнопке управления. 2. Путь перемещения всех механизмов ограничивается конечными выключателями. 3. При отключении двигателей включаются с помощью электромагнитов механические тормоза. 4. Все приводы должны иметь защиту от токов короткого замыкания и самопроизвольного пуска.
Описание технологической схемы кран-балки
Механизм передвижения электротали представляет собой четырехколесную тележку с электродвигателем и редуктором, приспособленную для передвижения по нижним полкам прокатных двутавровых балок. Тормоза механизм передвижения электротали не имеет.
В механизме подъема груза вращение от электродвигателя и редуктор передается на грузовой барабан. На барабан лебедки наматывается подъемный канат 13 с подвешенным к нему на блоке крюком для захвата груза. Груз удерживается на весу тормозом, затормаживаемым при выключении электродвигателя и растормаживаемым при включении.
Для привода механизма кран-балки используем асинхронные электродвигатели с короткозамкнутым ротором серии 4А и редукторы РМ. Привод кран-балки. Для привода кран-балки используем электродвигатель с синхронной частотой n = 1000 об/мин. По заданию скорость движения кран-балки v= 50 м/мин и диаметр ходовых колес dх. к = 0, 45 м. Перейдем от vб к частоте вращения ходовых колес nх. к: nх.к = vб / (π х dх.к) = 50/(3, 14 х 0, 45) = 35, 4 об/мин Тогда передаточное число редуктора равно: i = n / nх.к = 1000/35, 4 = 28, 2 Выбираем редуктор РМ250 с iф = 31, 5 и мощностью на быстроходном валу Р = 0, 9 кВт. Фактическая скорость передвижения кран-балки: vф = (v х i) / iф = (50 х 28, 2)/ 31, 5 = 44, 8 м/мин Отклонение от заданной Е = (v - vф) / v = (50 - 44, 8)/ 50 = 10, 4 % Такое отклонение является допустимым для крановых механизмов. Привод механизма передвижения электротали. Для этого привода применим электродвигатель с синхронной частотой вращения n = 1000 об/мин. По заданию: v= 20 м/мин и dх. к = 0, 2 м. nх.к = 20/(3, 14 х 0, 2) = 31, 8 об/мин i = n / nх.к = 1000/31, 8 = 31, 4 Выбираем редуктор РМ250 с iф = 31, 5 и Р = 0, 9 кВт. vф = (20 х 31, 4)/ 31, 5 = 19, 4 м/мин Е = (20 – 19, 4)/ 20 = 3 % Такое отклонение является допустимым. Привод механизма подъема. Выбираем электродвигатель с частотой n = 1500 об/мин. По заданию: v= 10 м/мин и dбар = 0, 4 м. nбар = (m x v) / (π х dбар) = (2 x 10)/ (3, 14 x 0, 4) = 15, 9 об/мин, где m – кратность полиспаста, m = 2. i = 1500/15, 9 = 94, 3 Выбираем редуктор РМ400 с iф = 98, 57 и Р = 2, 7 кВт. vф = (10 х 94, 3)/ 98, 57 = 9, 57 м/мин Е = (20 – 19, 4)/ 20 = 3 % Такое отклонение является допустимым.
Механизм передвижения кран-балки Статическая мощность Рс на валу двигателя передвижения кран-балки в установившемся режиме: Рс = 9, 81 х К х vм x (m+mo+mм)x(m x r+f)/(Rх. к х hм), (3.1) где К - коэффициент, учитывающий увеличение сопротивления движению из-за реборд ходовых колес о рельсы, К = 2, 5; m, mo, mм - соответственно масса перемещаемого груза, захватывающего устройства и моста с тележкой (или только тележки), m=1000 кг, mo=10 кг, mм=3800 кг; vм – скорость передвижения моста, vм = 5/6 м/с; Rх.к – радиус ходового колеса, Rх.к = 0, 225 м; m - коэффициент трения в опорах ходовых колес, m = 0, 015; r – радиус шейки оси ходового колеса, r = 0, 3 м; f - коэффициент трения качения ходовых колес по рельсам, f =0, 0005; hм - КПД механизма передвижения моста (тележки); определяем по кривым на рис.4.11 [4]. Статический момент Мс на валу двигателя Мс = (Рс х Rх. к) / (vм х iр ), (3.2) где iр – передаточное число редуктора механизма передвижения моста (тележки); iр= 31, 5. Передвижение с грузом Рс=9, 81х2, 5х(5/6)х(1000+10+3800)х(0, 015х0, 03+0, 0005)/(0, 225х0, 9)=461 Вт; Мс = (461х0, 225)/((5/6)х31, 5)=3, 95 Н∙ м. Передвижение без груза Рс=9, 81х2, 5х(5/6)х(10+3800)х(0, 015х0, 03+0, 0005)/(0, 225х0, 88)=373, 6 Вт; Мс = (373, 6х0, 225)/((5/6)х31, 5)=3, 2 Н∙ м. Построим нагрузочную диаграмму механизма передвижения (рис.3.1). Мс, Н∙ м
0 20 40 60 80 100 120 140 160 180 200 220 240 260 t, c tp1 to1 tp2 to2
tц = 180 с
рис.3.1
ПВ=(∑ tp/tц) х100%=(120/180) х100%=66, 6% Механизм передвижения тельфера Используя формулы (3.1) и (3.2), определим Рс и Мс. Передвижение с грузом Рс=9, 81х2, 5х(1/3)х(1000+10+900)х(0, 015х0, 03+0, 0003)/(0, 1х0, 9)=130 Вт; Мс = (130х0, 1)/((1/3)х31, 5)=1, 24 Н∙ м. Передвижение без груза Рс=9, 81х2, 5х(1/3)х(10+900)х(0, 015х0, 03+0, 0003)/(0, 1х0, 85)=65, 6 Вт; Мс = (65, 6х0, 1)/((1/3)х31, 5)=0, 62 Н∙ м. Строим нагрузочную диаграмму механизма передвижения тельфера (рис.3.2)
Мс, Н м
0 20 40 60 80 100 120 140 160 180 200 220 240 260 t, c tp1 to1 tp2 to2
tц = 180 с
рис3.2 По диаграмме определим продолжительность включения: ПВ=(30/180) х100%=16, 6%.
Механизм подъема Статическая мощность Рс.п на валу двигателя в установившемся режиме при подъеме груза: Рс = 9, 81 х vп x (m+mo)/ h, (3.3) где m, mo - соответственно масса поднимаемого груза, грузозахватывающего устройства, m=1000 кг, mo=10 кг; vп – скорость подъема груза, vп = 1/6 м/с; h - общий КПД механизма подъема, определяемый по кривым на рис.4.11 [4]. Рс=9, 81х(1/6)х(1000+10)/0, 85=1943 Вт. Статический момент Мс на валу двигателя подъема
где v – скорость движения крюка, v = 1/6 м/с; Rб – радиус барабана, Rб=0, 2 м; iр – передаточное число редуктора механизма подъема; iр= 98, 57; iп – передаточное число полиспаста; iп= 2. Мс = (1943х0, 2)/((1/6)х98, 57х2)=11, 83 Нм. При подъеме пустого крюка Рс.по = 9, 81 х vп x mo/ hо, (3.5) где hо - КПД механизма при m=0. Рс. по=9, 81х(1/6)х10/0, 1=163, 5 Вт. М с.по = (163, 5х0, 2)/((1/6)х98, 57х2)=1 Н∙ м. Строим нагрузочную диаграмму механизма передвижения тельфера (рис.3.3)
 
        Н м Н м
Подъем mo
 1 Спуск mo 1 Спуск mo
0 20 40 60 80 100 120 140 160 180 200 220 240 t, c
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1993; Нарушение авторского права страницы
 Введение …………………………….…………………………………………3
Введение …………………………….…………………………………………3 Введение
Введение  Задание на курсовой проект
Задание на курсовой проект 


 (28)
(28) - изменение частоты микроконтроллера, Гц;
- изменение частоты микроконтроллера, Гц;  - изменение напряжения подаваемого на микроконтроллер, В.
- изменение напряжения подаваемого на микроконтроллер, В.
 (29)
(29) - число полюсов двигателя.
- число полюсов двигателя. то
то 
 (30)
(30) ;
;  - напряжение подаваемого на вход тахогенератора, В.
- напряжение подаваемого на вход тахогенератора, В.
 (31)
(31)
 13.3. Расчет динамики
13.3. Расчет динамики  - апериодическое звено первого порядка
- апериодическое звено первого порядка (32)
(32) - приведенный к валу двигателя момент инерции;
- приведенный к валу двигателя момент инерции;  - модуль жесткости механической характеристики.
- модуль жесткости механической характеристики. (33)
(33)



 САР устойчива, т.к. на
САР устойчива, т.к. на  , запас устойчивости равен 85, 70.
, запас устойчивости равен 85, 70.


 известные числовые значения
известные числовые значения
 от
от  :
: 

 - частота излома горизонтальной части;
- частота излома горизонтальной части;  - частота конца наклона участка;
- частота конца наклона участка;  - частота излома 2-й трапеции;
- частота излома 2-й трапеции;  - частота конца 2-й трапеции;
- частота конца 2-й трапеции;  - начальная ордината 1-й трапеции.
- начальная ордината 1-й трапеции. для построения переходного процесса
для построения переходного процесса  (34)
(34)
 связаны в таблицу h – функций.
связаны в таблицу h – функций.
 (35)
(35) (36)
(36) где:
где:  - табличное значение h (для единичной трапеции)
- табличное значение h (для единичной трапеции) .
. (h – скорость в относительных единицах).
(h – скорость в относительных единицах).
 (37)
(37)
 (38)
(38) - максимальный динамический момент;
- максимальный динамический момент;  - приращение скорости к приращению времени.
- приращение скорости к приращению времени.


 Грундулис А.О. Защита электродвигателей в сельском хозяйстве.- 2-е изд., перераб. и доп.- М.: Агропромиздат, 1988. - 111с.
Грундулис А.О. Защита электродвигателей в сельском хозяйстве.- 2-е изд., перераб. и доп.- М.: Агропромиздат, 1988. - 111с.






 Заключение
Заключение В приложении показана технологическая и кинематическая схемы кран-балки. Пролетное строение моста кран-балки представляет собой ездовой двутавр (прокатные двутавровые балки), опирающийся концами на концевые балки, на которых установлены ходовые колеса. Колеса перемещаются по рельсам подкранового пути, закрепленным на балках опорных конструкций в верхней части цеха. Привод ходовых колес осуществляется от электродвигателя через редуктор и трансмиссионный вал. Механизм передвижения крана оборудован электромагнитным тормозом, установленным на быстроходном валу редуктора. Ездовые двутавры усилены верхним трапецеидальным шпренгелем, состоящим из двух сваренных по длине коробку прокатных швеллеров.
В приложении показана технологическая и кинематическая схемы кран-балки. Пролетное строение моста кран-балки представляет собой ездовой двутавр (прокатные двутавровые балки), опирающийся концами на концевые балки, на которых установлены ходовые колеса. Колеса перемещаются по рельсам подкранового пути, закрепленным на балках опорных конструкций в верхней части цеха. Привод ходовых колес осуществляется от электродвигателя через редуктор и трансмиссионный вал. Механизм передвижения крана оборудован электромагнитным тормозом, установленным на быстроходном валу редуктора. Ездовые двутавры усилены верхним трапецеидальным шпренгелем, состоящим из двух сваренных по длине коробку прокатных швеллеров. 2.Выбор частоты вращения двигателя и технических данных редуктора
2.Выбор частоты вращения двигателя и технических данных редуктора  3. Расчет и построение нагрузочной диаграммы и механической характеристики рабочей машины
3. Расчет и построение нагрузочной диаграммы и механической характеристики рабочей машины 









 По диаграмме определим продолжительность включения:
По диаграмме определим продолжительность включения: 
 1, 5
1, 5 1
1

 Мс = (Рс х Rб) / (v х iр х iп ), (3.4)
Мс = (Рс х Rб) / (v х iр х iп ), (3.4) 11
11
 10
10 7
7 5
5 4
4
