|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Построение структурной схемы для расчета статики ⇐ ПредыдущаяСтр 3 из 3
Структурная схема представляет графическое изображение системы уравнений статики всех элементов. Замкнутая система электропривода необходима, если выполняется условие:
Абсолютное снижение угловой скорости электродвигателя:
Тогда Построим структурную схему для расчета
Рисунок 13.2 Первоначальная схема. Для расчета статики, необходимо исходную схему привести к простейшей.
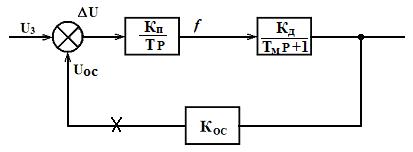
КП – коэффициент преобразователя; КОС – коэффициент обратной связи; КД1 – коэффициент двигателя. Рисунок 13.3 Расчетная схема
Так как
Представим элементы системы в виде типовых динамических звеньев и определим их основные параметры. Передаточная функция
Электромеханическая постоянная
значок (Х) показывает, что схема выглядит разомкнутой.
Рисунок 13.4 Структурная схема для расчета динамики В разомкнутой системе
Построим ЛФЧХ и ЛАЧХ для определения устойчивости

Рис 13.5 Определение устойчивости
Построение вещественно частотной характеристики, построим для замкнутой САР. Для рисунка она будет иметь следующий вид:
Подставим в
Построим зависимость
Рисунок 13.6 Аппроксимация графика Определим
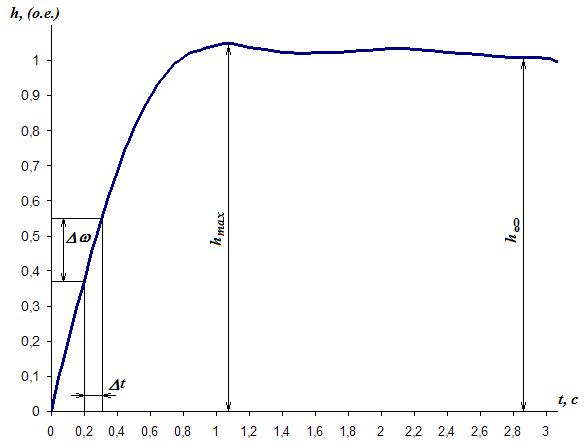
Зависимости Переходный процесс представляет из себя зависимость Время переходного процесса (реальное):
По таблице h функции получим переходную характеристику, переходной характеристикой 2-й трапеции можно пренебречь, в виду ее малой начальной ординаты и почти одинакового показателя Таблица 5 – Таблица h функций и значения времени для построения графика переходного процесса
На графике h в относительных единицах, а время (t) в реальном масштабе
Величина перерегулирования
N=2 – количество колебаний. Фактическое значение максимального момента
где:
Рисунок 13.7 График переходного процесса при регулировании скорости электродвигателя,
Литература
1. 2. Кисаримов Р.А. Справочник электрика.- 2-е изд., перераб. и доп.- М.: ИП РадиоСофт, 2004. - 512с. 3. Контрольно-измерительные приборы и средства автоматизации: каталог продукции фирмы «ОВЕН». - М.: СинФазИн, 2003. – 152с. 4. Кондратьева Н.П. «Выбор аппаратуры управления электрических установок. Учебное пособие» - ИжГСХА, Ижевск, 1995 – 140с. 5. Правила устройства электроустановок.7-е изд. Доп. с исправлениями.- М.: ЗАО «Энергосервис», 2003.-608с. 6. Межотраслевые правила по охране труда при эксплуатации электроустановок.- М.: Изд-во НЦЭНАС, 2003-192с. 7. Правила технической эксплуатации электроустановок потребителей.-М.: Изд-во «Энергосервис», 2001-287с. 8. Фоменков А.П. Электропривод сельскохозяйственных машин, агрегатов и поточных линий. - 2-е изд., перераб. и доп.- М.: Колос, 1984. – 288с.
Приложение
1 – барабан; 2 – тельфер; 3 – балка Рисунок 1 Схема устройства кран – балки
1 – двигатель; 2 – муфта; 3 – редуктор; 4 – муфта; 5 – трансмиссионный вал; 6 – колесо балки
Рисунок 2 Кинематическая схема механизма передвижения балки
1 – двигатель; 2 – редуктор; 3 – барабан; 4 – крановая подвеска; 5 – трос
Рисунок 3 Кинематическая схема механизма подъема и опускания груза
Рисунок 4Механическая характеристика рабочей машины
Рисунок 5 Механическая характеристика двигателя. (Естественная и Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1191; Нарушение авторского права страницы
 (23)
(23) (24)
(24) - требуемый статизм регулирования условий скорости;
- требуемый статизм регулирования условий скорости; 
 - минимальная угловая скорость вращения, рад/с;
- минимальная угловая скорость вращения, рад/с;  (25)
(25) - максимальная скорость вращения, рад/с;
- максимальная скорость вращения, рад/с;  - диапазон регулирования угловой скорости;
- диапазон регулирования угловой скорости;  (26)
(26) - номинальное скольжение двигателя, %.
- номинальное скольжение двигателя, %.

 (27)
(27)
 , условие выполняется, нужна замкнутая система электропривода..
, условие выполняется, нужна замкнутая система электропривода..


 (28)
(28) - изменение частоты микроконтроллера, Гц;
- изменение частоты микроконтроллера, Гц;  - изменение напряжения подаваемого на микроконтроллер, В.
- изменение напряжения подаваемого на микроконтроллер, В.
 (29)
(29) - число полюсов двигателя.
- число полюсов двигателя. то
то 
 (30)
(30) ;
;  - напряжение подаваемого на вход тахогенератора, В.
- напряжение подаваемого на вход тахогенератора, В.
 (31)
(31)
 13.3. Расчет динамики
13.3. Расчет динамики  - апериодическое звено первого порядка
- апериодическое звено первого порядка (32)
(32) - приведенный к валу двигателя момент инерции;
- приведенный к валу двигателя момент инерции;  - модуль жесткости механической характеристики.
- модуль жесткости механической характеристики. (33)
(33)



 САР устойчива, т.к. на
САР устойчива, т.к. на  , запас устойчивости равен 85, 70.
, запас устойчивости равен 85, 70.


 известные числовые значения
известные числовые значения
 от
от  :
: 

 - частота излома горизонтальной части;
- частота излома горизонтальной части;  - частота конца наклона участка;
- частота конца наклона участка;  - частота излома 2-й трапеции;
- частота излома 2-й трапеции;  - частота конца 2-й трапеции;
- частота конца 2-й трапеции;  - начальная ордината 1-й трапеции.
- начальная ордината 1-й трапеции. для построения переходного процесса
для построения переходного процесса  (34)
(34)
 связаны в таблицу h – функций.
связаны в таблицу h – функций.
 (35)
(35) (36)
(36) где:
где:  - табличное значение h (для единичной трапеции)
- табличное значение h (для единичной трапеции) .
. (h – скорость в относительных единицах).
(h – скорость в относительных единицах).
 (37)
(37)
 (38)
(38) - максимальный динамический момент;
- максимальный динамический момент;  - приращение скорости к приращению времени.
- приращение скорости к приращению времени.


 Грундулис А.О. Защита электродвигателей в сельском хозяйстве.- 2-е изд., перераб. и доп.- М.: Агропромиздат, 1988. - 111с.
Грундулис А.О. Защита электродвигателей в сельском хозяйстве.- 2-е изд., перераб. и доп.- М.: Агропромиздат, 1988. - 111с.