
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Импульсное регулирование скорости
Импульсное регулирование скорости (рис.1) производится путем периодического включения двигателя в сеть и отключения его от сети или путем периодического шунтирования с помощью контактора К сопротивлений, включенных последовательно в цепь статора, или полупроводниковых вентилей.
Рис. 1.
При этом двигатель беспрерывно находится в переходном режиме ускорения или замедления скорости вращения ротора и в зависимости от частоты и продолжительности импульсов работает с некоторой, приблизительно постоянной скоростью вращения. Подобное регулирование скорости применяется только для двигателей весьма малой мощности (рн < 30 - 50 вт). Регулирование скорости вращения асинхронных двигателей с фазным ротором
Для двигателей с фазным ротором можно в принципе использовать все те же способы регулирования скорости вращения, как и для двигателей с короткозамкнутым ротором. Однако на практике из числа этих способов для двигателей с фазным ротором применяется только способ регулирования скорости вращения с помощью реакторов насыщения. Ниже рассмотрим способы регулирования скорости вращения, которые специфичны для двигателей с фазным ротором и в которых используется возможность включения регулирующих устройств во вторичную цепь.
Регулирование скорости вращения с помощью реостата в цепи ротора
Регулирование скорости вращения с помощью реостата в цепи ротора производится по той же схеме, что и реостатный пуск двигателя, но реостат при этом должен быть рассчитан на длительную работу. При увеличении активного сопротивления вторичной цепи вид механической характеристики двигателя изменяется
характеристика становится более мягкой и скольжение двигателя при том же моменте нагрузки Мст увеличивается. При Мст = const рабочее скольжение s с большой точностью пропорционально sm и, следовательно, активному сопротивлению цепи ротора. Поэтому скольжения s и s', соответствующие случаям rд = 0 и
откуда значение rд, необходимое для получения скольжения s', равно
Рассматриваемый способ регулирования скорости связан со значительными потерями энергии в сопротивлении rд и поэтому малоэкономичен. Он применяется главным образом при кратковременной или повторно-кратковременной работе (например, пуско-наладочные режимы некоторых машин, крановые устройства и пр.), а также в приводах с вентиляторным моментом. В последнем случае мощность на валу с уменьшением скорости быстро снижается, и поэтому мощность скольжения и потери в цепи ротора по величине ограничены. К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Регулирование скорости вращения посредством введения добавочной э. д. с. во вторичную цепь двигателя.
Регулирование скорости вращения асинхронного двигателя путем увеличения его скольжения всегда связано с выделением во вторичной цепи двигателя значительной электрической мощности скольжения
большая часть которой при реостатном регулировании теряется в реостате. Поэтому, естественно, возникает мысль о полезном использовании этой мощности и о повышении таким образом к. п. д. установки. Полезное использование мощности скольжения возможно, если вместо реостата присоединить к контактным кольцам фазного двигателя приемник электрической энергии в виде подходящей для этой цели вспомогательной электрической машины. Эта машина будет работать в режиме двигателя и оказывать воздействие на регулируемый асинхронный двигатель, развивая напряжение на его вторичных зажимах, так как при вращении вспомогательной машины в ее якоре индуктируется э. д. с. Можно также сказать, что задачей вспомогательной машины, как и реостата при реостатном регулировании, является создание «подпора» напряжения на контактных кольцах регулируемого асинхронного двигателя, ибо наличие определенного напряжения на кольцах
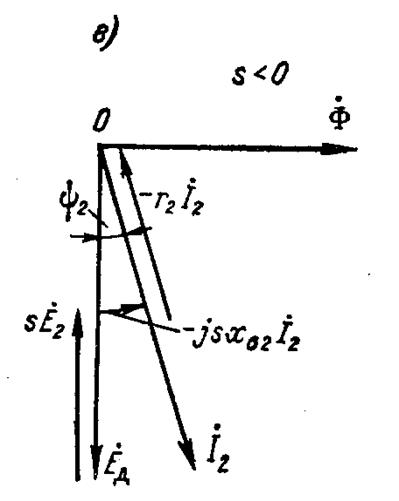
во внешнюю цепь двигателя. Вместе с тем, вспомогательная машина в отличие от реостата позволяет полезно использовать эту мощность. Прежде всего рассмотрим вопрос о влиянии на работу фазного асинхронного двигателя внешней добавочной э.д.с. Е2, вводимой во вторичную цепь двигателя с помощью его контактных колец, при условии, что частота этой добавочной э. д. с. всегда равна частоте вторичного тока и э.д.с. На рис.1, а, изображена векторная диаграмма вторичной цепи асинхронного двигателя при Ед = 0. Вторичный ток двигателя
имеет величину, необходимую для создания нужного электромагнитного момента М в соответствии с величиной момента нагрузки Мст на валу. Если теперь во вторичную цепь ввести э. д. с. Ед встречно э. д. с. скольжения E2s в этой же цепи, то вторичный ток
в первый момент времени уменьшится. Поэтому развиваемый двигателем момент М также уменьшится, двигатель начнет тормозиться, а скольжение s - увеличиваться. При этом ток Iа, а вместе с ним и момент М будут увеличиваться. Это будет происходить до тех пор, пока опять не наступит равновесие моментов М = Мст„ на валу. Двигатель при этом будет работать с увеличенным скольжением s, а векторная диаграмма вторичной цепи приобретет вид, изображенный на рис.1, б.
Очевидно, что посредством регулирования величины Ед можно регулировать величину s и, следовательно, скорость вращения двигателя. Предположим теперь, что э.д.с. Ед имеет по сравнению с рассмотренным случаем противоположное направление и совпадает по фазе с э. д. с.
В первый момент после введения э. д. с. Ед ток I2 и момент М возрастут, двигатель будет ускоряться и s будет уменьшаться. При достаточной величине Ед величина s уменьшится до нуля, и если ток Iа. создаваемый в этом случае только за счет действия Ед, все еще будет велик по сравнению с током, необходимым для создания момента М = Мст то ускорение двигателя будет продолжаться и скорость превысит синхронную. Скольжение s и э. д. с.
отрицательный и векторная диаграмма вторичной цепи двигателя имеет вид,
Ток Таким образом, с помощью добавочной э. д. с. Ед, путем изменения ее величины и направления, можно осуществить плавное двухзонное регулирование скорости двигателя: ниже и выше синхронной.
СИНХРОНЫЕ МАШИНЫ. УСТРОЙСТВО И ПРИНЦИП ДЕЙСТВИЯ.
Статор синхронной машины имеет такое же устройство, как и статор асинхронной машины. Трехфазная или в общем случае m-фазная обмотка машины выполняется с таким же числом полюсов, как и ротор, и называется так же обмоткой. Сердечник ротора вместе с обмоткой называется также якорем. На рис. условно показаны только выводные концы А, В, С обмотки статора.
Рис 1, а. Ротор синхронной машины имеет обмотку возбуждения, питаемую через два контактных кольца и щетки постоянным током от
Рис 1, б постороннего источника. В качестве источника чаще всего служит генератор постоянного тока относительно небольшой мощности (0, 3—3, 0% от мощности синхронной машины), который называется возбудителем и устанавливается обычно на одном валу с синхронной машиной. Назначение обмотки возбуждения — создание в машине первичного магнитного поля. Ротор вместе со своей обмоткой возбуждения называется также индуктором. При изготовлении синхронных машин принимаются меры к тому, чтобы распределение индукции поля возбуждения вдоль окружности статора было по возможности близко к синусоидальному. Если ротор синхронной машины привести во вращение с некоторой скоростью п об/сек и возбудить его, то поток возбуждения Фf будет пересекать проводники обмотки статора и в фазах последней будут индуктироваться э. д. с. с частотой
Э. д. с. статора составляют симметричную трехфазную систему э. д. с., и при подключении к обмотке статора симметричной нагрузки эта обмотка нагрузится симметричной системой токов. Машина при этом будет работать в режиме генератора. При нагрузке обмотка статора создает такое же по своему характеру вращающееся магнитное поле, как и обмотка статора асинхронной машины. Это поле статора вращается в направлении вращения ротора со скоростью
Если подставить сюда f1 из формулы, то получим Поля статора и ротора вращаются с одинаковой скоростью и образуют, таким образом, общее вращающееся поле, как и в асинхронной машине. Поле статора (якоря) оказывает воздействие на поле ротора (индуктора) и называется в связи с этим также полем реакции якоря. Синхронная машина может работать и в качестве двигателя, если подвести к обмотке ее статора трехфазный ток из сети. В этом случае в результате взаимодействия магнитных полей статора и ротора поле статора увлекает за собой ротор. При этом ротор вращается в ту же сторону и с такой же скоростью, как и поле статора. Из формулы следует, что чем больше число пар полюсов синхронной машины р, тем меньше должна быть ее скорость вращения f1 для получения заданной частоты f1. По своей конструкции синхронные машины подразделяются на явнополюсные (Рис 1, а) и неявнополюсные (Рис 1, б).
Популярное:
|
Последнее изменение этой страницы: 2016-03-17; Просмотров: 1376; Нарушение авторского права страницы


 , находятся в соотношении
, находятся в соотношении


 — непременное условие выдачи с этих колец определенной мощности
— непременное условие выдачи с этих колец определенной мощности
 самого двигателя.
самого двигателя.



 на рис. 1, а. Тогда вместо получим
на рис. 1, а. Тогда вместо получим


 при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos
при этом будет иметь составляющую, совпадающую с Ф. Поэтому намагничивающий ток, потребляемый из первичной цепи, уменьшится и cos  двигателя повысится.
двигателя повысится.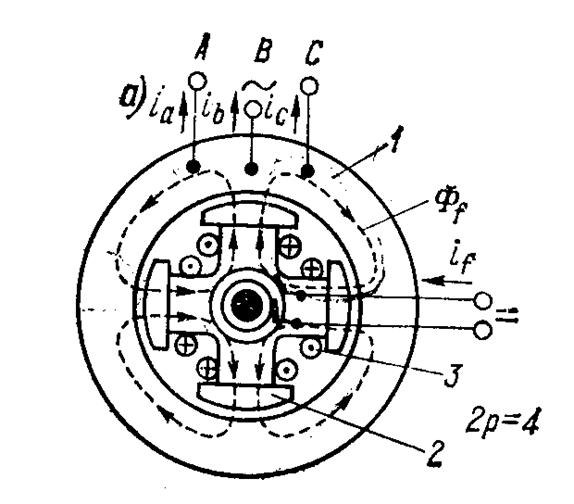


 об/сек.
об/сек. .
.