
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Методы автоматической подстройки частоты
Суть АПЧ состоит в том, что частота колебаний генератора преобразуется к частоте некоторого эталона (высокостабильного колебания), сравнивается: этим эталоном, и полученная ошибка используется для устранения нестабильности частоты генератора. В зависимости от схемы сравнивающего устройства системы АПЧ подразделяются на системы частотной автоподстройки (ЧАП), системы фазовой автоподстройки (ФАП) и системы импульсно-фазовой автоподстройки (ИФАП). В системах ЧАП в качестве сравнивающего устройства служит частотный детектор (ЧД), в системах ФАП – фазовый детектор (ФД), а в системах ИФАП – импульсно-фазовый детектор (ИФД). Недостатком систем частотной автоподстройки является наличие остаточной расстройки автогенератора, устранение которой требует специальных мнительных мер. По этой причине системы ЧАП не находят в настоящее время широкого применения. Рассмотрим подробнее систему ФАП, принцип работы которой поясняется рис. 2.6. Выходное колебание синтезатора создает управляемый генератор (УГ)1, автоматически подстраиваемый кольцом ФАП. Для осуществления автоподстройки колебания УГ преобразуются в колебания более низкой промежуточной частоты
Рис. 2.6. Структурная схема системы ФАП
Колебания промежуточной частоты подаются на ФД, где сравниваются с эталонной частотой
Рис. 2.7. Характеристика фазового детектора
Кроме того, в спектре выходного напряжения ФД содержатся высокочастотные составляющие с частотами Если частоты сравниваемых колебаний на входе ФД отличаются, то напряжение на его выходе будет изменяться. Это напряжение является управляющим для УГ и будет изменять частоту его колебаний до тех пор, пока промежуточная частота не сравняется с эталонной, т. е. до выполнения условия Таким образом, в установившемся режиме частота колебаний на выходе системы ФАП будет равна
т. е. полностью определяется высокостабильными частотами ОГ и ДОЧ. Из приведенного выражения следует также, что при изменении одной из частот Максимальная начальная расстройка, которая может быть скомпенсирована системой ФАП, называется полосой схватывания (или захватывания) и ограничивается полосой в несколько килогерц. Поэтому в схемах применяются специальные системы автопоиска, которые изменяют частоту УГ во всем диапазоне частот и обеспечивают ее попадание в полосу схватывания системы ФАП. Система автопоиска обычно представляет собой автогенератор пилообразного напряжения, который запускается при отсутствии управляющего напряжения на выходе ФД и изменяет частоту УГ в широких пределах. Как только частота УГ попадает в полосу схватывания системы ФАП, генератор поиска выключается, сохраняя напряжение на выходе, которое было в момент выключения. Дальнейшее изменение частоты генератора обеспечивается системой ФАП. Для изменения частоты автогенераторов используются так называемые реактивные элементы (РЭ), в качестве которых чаще всего служат варикапы. Варикап представляет собой полупроводниковый диод, емкость которого изменяется под воздействием приложенного к нему напряжения. Если варикап подключить параллельно элементам колебательного контура автогенератора и подать на него управляющий (или модулирующий) сигнал, то под действием последнего будет изменяться эквивалентная емкость контура, а, следовательно, и частота генерируемых колебаний. Основная характеристика варикапа и один из вариантов включения его в контур автогенератора показаны на рис. 2.8.
Рис. 2.8. Характеристика варикапа и вариант его включения в контур автогенератора Цифровые синтезаторы частот Широкое использование логических интегральных схем в технике связи обусловило появление новых типов синтезаторов частот, которые принято называть цифровыми. Наибольшее распространение получили цифровые синтезаторы, выполненные по методу косвенного синтеза с фазовой автоматической подстройкой частоты. Наиболее простая схема цифрового синтезатора с системой ИФАП представлена на рис. 2.9. В состав схемы входят управляемый генератор (УГ), формирующие устройства (ФУ), делитель с переменным коэффициентом деления (ДПКД), импульсно-фазовый детектор (ИФД) и ФНЧ.
Рис. 2.9. Система ИФАП цифрового синтезатора частоты
Колебания УГ, преобразованные с помощью формирующего устройства в импульсную последовательность той же частоты, поступают на ДПКД. На выходе делителя имеет место последовательность импульсов с частотой следования На выходе ИФД выделяется управляющее напряжение, зависящее от разности фаз (частот) сравниваемых колебаний, и приводит систему в стационарное состояние, при котором соблюдается условия:
Из приведенного выражения видно, что выходная частота генератора полностью определяется эталонной частотой Таким образом, применение цифровых элементов позволило заменить преобразователи частоты делителями, что существенно уменьшает уровень побочных колебаний на выходе синтезатора. Кроме того, использование ДПКД резко увеличило полосу схватывания системы ФАП, поэтому в сравнительно узкодиапазонных синтезаторах не требуется применение систем автопоиска. Рассмотренные выше синтезаторы частот, независимо от методов их построения, находят широкое применение не только в возбудителях радиопередатчиков, но и в целом ряде различных радиотехнических устройств. В супергетеродинных радиоприемниках синтезаторы частот выполняют функции гетеродинов. Синтезаторы широко используются в измерительных приборах (генераторах, частотомерах, анализаторах спектра и пр.), в телеметрических устройствах, в различных приборах, предназначенных для физических исследований, и т. д. 4. Тракты формирования радиосигналов
Одной из функций возбудителя является преобразование первичных электрических сигналов в высокочастотные сигналы (радиосигналы). Это преобразование рассматривается как формирование радиосигналов. В современных военных радиостанциях широко используются следующие виды радиосигналов: ¨ телефонные с однополосной модуляцией (ОМ); ¨ телефонные с частотной модуляцией (ЧМ); ¨ телеграфные с амплитудной манипуляцией (АТ – амплитудное телеграфирование); ¨ телеграфные с частотной манипуляцией (ЧТ – частотное телеграфирование); ¨ телеграфные с двойной частотной манипуляцией (ДЧТ); ¨ телеграфные с относительной фазовой манипуляцией (ОФТ). Каждый вид радиосигналов требует специальных устройств, которые реализуют тот или иной метод формирования. Все формирующие устройства обычно объединяются в один конструктивный и функциональный блок – блок формирования радиосигналов (БФС). Независимо от вида формируемых радиосигналов к БФС предъявляются следующие общие требования: – минимальный уровень нелинейных и частотных искажений первичного сигнала в процессе формирования радиосигнала; – минимальный уровень побочных колебаний в процессе формирования радиосигналов; – малый уровень собственных шумов на выходе БФС; – высокая стабильность частоты формируемых радиосигналов. Выполнение указанных требований легче обеспечить при сравнительно малых уровнях сигналов и относительно низких частотах. Поэтому в большинстве случаев радиосигналы первоначально формируются в БФС на одной фиксированной частоте, измеряемой сотнями килогерц или единицами мегагерц, а затем с помощью ряда преобразований частоты (в такте преобразования радиосигналов) спектр сигнала переносится в область более высоких частот, а при последнем преобразовании - на рабочую частоту возбудителя. Все опорные колебания, обеспечивающие преобразование сигнала и перенос его спектра на рабочую частоту, вырабатываются синтезатором. Рассмотрим принципы формирования отдельных видов радиосигналов. 4.1. Формирование радиосигналов с однополосной модуляцией
В настоящее время при работе радиостанций в телефонном режиме на частотах до 20...30 МГц основным видом модуляции стала однополосная модуляция (ОМ), которая имеет ряд неоспоримых преимуществ по сравнению с применявшейся ранее амплитудной модуляцией (см. занятие № 1). Существуют различные способы формирования ОМ сигналов: фильтровый, фазофильтровый, фазокомпенсационный, синтетический и др. В современной аппаратуре находит широкое применение только один из них – фильтровый способ. Этот способ прост в реализации и обеспечивает получение высоких качественных показателей возбудителей. Фильтровый способ предполагает выделение с помощью полосового фильтра одной из боковых полос амплитудно-модулированного сигнала. Принцип формирования ОМ сигнала поясняется рис. 2.10.
Рис. 2.10. Фильтровый способ формирования ОМ сигналов
На входы балансного модулятора подаются первичный электрический сигнал, имеющий спектр F, и гармонический сигнал с частотой В военной радиосвязи первичный сигнал занимает полосу частот Тракт формирования ОМ радиосигналов должен предусматривать возможность передачи так называемого пилот-сигнала – остатка несущего колебания. Пилот-сигнал необходим для неискаженной демодуляции ОМ сигнала в радиоприемном устройстве при несовпадении частоты радиопередатчика с частотой настройки радиоприемника. Такое несовпадение частот (асинхронизм радиолинии) может возникать за счет нестабильности рабочих частот передатчика и приемника, а также вследствие доплеровского сдвига частоты при обеспечении радиосвязи с высокоскоростными объектами. Уровень пилот-сигнала в этом случае выбирается порядка 10 % (минус 20 дБ) от максимального напряжения однополосного радиосигнала и используется системой автоматической подстройки частоты (АПЧ) радиоприемника. Пилот-сигнал большего уровня (50...70% или минус 6 дБ) применяется 1ля имитации амплитудно-модулированного сигнала. Такой сигнал может быть принят радиостанциями старого парка, в которых предусмотрена работа только АМ сигналами. Популярное:
|
Последнее изменение этой страницы: 2016-03-26; Просмотров: 3460; Нарушение авторского права страницы
 , которая определяется разностью между частотой датчика опорных частот
, которая определяется разностью между частотой датчика опорных частот  и частотой управляемого генератора
и частотой управляемого генератора  :
: 
 опорного генератора. На выходе ФД появится напряжение (
опорного генератора. На выходе ФД появится напряжение (  ), значение которого зависит от разности фаз (Dj) сравниваемых колебаний. Типичная характеристика ФД показана на рис. 2.7.
), значение которого зависит от разности фаз (Dj) сравниваемых колебаний. Типичная характеристика ФД показана на рис. 2.7.
 и другие гармоники. Все эти составляющие должны быть подавлены с помощью фильтра нижних частот (ФНЧ), включенного на выходе ФД. В противном случае они вызовут паразитную частотную модуляцию УГ. Отсюда следует, что частоту среза ФНЧ необходимо выбирать меньшей, чем частоту сравнения.
и другие гармоники. Все эти составляющие должны быть подавлены с помощью фильтра нижних частот (ФНЧ), включенного на выходе ФД. В противном случае они вызовут паразитную частотную модуляцию УГ. Отсюда следует, что частоту среза ФНЧ необходимо выбирать меньшей, чем частоту сравнения. . При этом на выходе ФД будет иметь место только постоянное напряжение, которое и будет удерживать систему в стационарном состоянии.
. При этом на выходе ФД будет иметь место только постоянное напряжение, которое и будет удерживать систему в стационарном состоянии. ,
, 
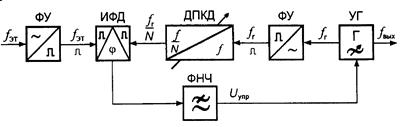
 , где N - коэффициент деления ДПКД, величина которого изменяется в необходимых пределах внешними органами управления. Последовательность с выхода ДПКД поступает на вход ИФД, где сравнивается с эталонной импульсной последовательностью.
, где N - коэффициент деления ДПКД, величина которого изменяется в необходимых пределах внешними органами управления. Последовательность с выхода ДПКД поступает на вход ИФД, где сравнивается с эталонной импульсной последовательностью.

 в качестве несущего колебания. На выходе модулятора, собранного по балансной схеме, получается спектр АМ сигнала в составе нижней боковой полосы частот (
в качестве несущего колебания. На выходе модулятора, собранного по балансной схеме, получается спектр АМ сигнала в составе нижней боковой полосы частот (  ), верхней боковой полосы частот (
), верхней боковой полосы частот (  ) и подавленной несущей
) и подавленной несущей