
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
ОСНОВНЫЕ ПРИНЦИПЫ ПОСТРОЕНИЯ ГСП. СТРУКТУРА ГСП ⇐ ПредыдущаяСтр 8 из 8
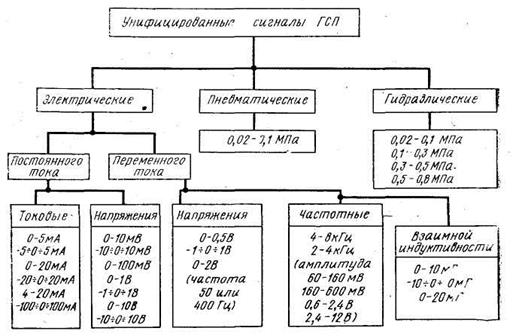
Широкое внедрение в пищевую промышленность автоматизации технологических процессов, основанное на использовании различных технических средств, явилось предпосылкой создания и внедрения ГСП. ГСП разработана с целью наиболее экономически целесообразного решения проблемы обеспечения техническими средствами автоматических систем контроля, регулирования и управления технологическими процессами различных отраслей народного хозяйства. В настоящее время ГСП определяет направления развития отечественного приборостроения,, требования к которому непрерывно возрастают как по номенклатуре изделий, так и по их качественным показателям. В основе построения ГСП лежат определенные системотехнические принципы, направленные на создание системы универсальных технических средств автоматизации, которые могут быть сформулированы следующим образом: разделение приборов и средств автоматизации по функциональным признакам на основе типизации систем автоматизации; минимизация номенклатуры с учетом более полного удовлетворения потребностей отраслей народного хозяйства путем создания параметрических рядов, унифицированных систем и агрегатированных комплексов приборов и средств автоматизации; блочно-модульное построение изделий ГСП на основе типовых унифицированных блоков и модулей; агрегатированное построение сложных устройств на основе типовых унифицированных блоков и приборов; совместимость приборов и средств автоматизации ГСП при работе в автоматических системах контроля, регулирования и управления. Эта совместимость обеспечивается путем унификации сигналов между электрическими, пневматическими и гидравлическими приборами, конструктивных и присоединительных размеров, а также технических и эксплуатационных требований к ним. По функциональным признакам (или назначению) изделия ГСП разделяются на следующие группы устройств: 1—для получения информации о состоянии процессов; 2 — для приема, преобразования и передачи информации по каналам связи; 3 — для преобразования, хранения и обработки информации и формирования команд управления; 4 — для использования командной информации в целях, воздействия на процесс, т. е. исполнительные устройства. По виду энергии, используемой для питания устройств и формирования сигналов, ГСП подразделяется на несколько больших групп, так называемых ветвей: электрическую, пневматическую, гидравлическую, а также ветвь приборов и устройств, работающих без источников вспомогательной энергии. В системах автоматизации управления сложными технологическими процессами применяются, как правило, одновременно технические устройства и приборы всех ветвей. Связь электрических, пневматических и гидравлических устройств и приборов между собой осуществляется с помощью специальных преобразователей сигналов. Создание параметрических рядов, унифицированных систем и агрегатированных комплексов приборов и средств автоматизации значительно сокращает номенклатуру ГСП. При конструировании устройств ГСП принят блочно-модульный принцип построения изделий. Его применение делает изделия более универсальными, позволяет использовать при их разработке рациональный минимум конструктивных элементов. Вместе с тем использование этого принципа позволяет легко и просто заменять отдельные унифицированные блоки и модули устройств при необходимости, т. е. повышает их ремонтопригодность и расширяет круг решаемых ими задач. Агрегатирование является эффективным средством унификации и достижения универсальности средств ГСП, обеспечивающих построение сложных централизованных и телемеханических автоматических и автоматизированных систем контроля, регулирования и управления, предназначенных для обработки большого объема измерительной и управляющей информации. Разработка целой серии (около 20) агрегатированных комплексов на базе последних достижений микроэлектроники направлена в первую очередь на повышение эффективности ГСП в условиях широкого внедрения автоматизированных систем управления (АСУ) различных уровней и особенно автоматизированных систем управления технологическими процессами (АСУ ТП). Агрегатированные комплексы, таким образом, рассматриваются как подсистемы ГСП, полностью отвечающие общим системным принципам ГСП и имеющие согласованную с ней общую функциональную направленность. Принципы построения ГСП и технические требования к различным видам изделий отображены в ряде государственных и отраслевых стандартов (ГОСТ и ОСТ), которых в настоящее время насчитывается около 200. Комплекс этих стандартов гарантирует и определяет функциональную, информационную, конструктивную, энергетическую и метрологическую совместимость изделий ГСП в автоматических системах контроля, регулирования и управления. Действующие ГОСТы и ОСТы подразделяются на следующие группы; общие стандарты, нормирующие общие технические требования к надежности, метрологии, условиям эксплуатации, установке, транспортировке, хранению и т. д.; стандарты, нормирующие входные и выходные сигналы; стандарты, нормирующие требования к функциональным группам; изделий; стандарты, нормирующие требования к различным видам конструктивного исполнения; стандарты, нормирующие требования к типовым деталям и узлам изделий Унификация сигналов измерительной информации (определяемая соответствующими стандартами) обеспечивает, передачу и обмен информацией, а также дистанционную связь между устройствами управления, передачу результатов измерений от средств получения информации к устройствам контроля и управления, а также управляющих сигналов на исполнительные механизмы. Классификация основных унифицированных информационных сигналов ГСП показана на рис. III.1. Из электрических сигналов наибольшее распространение получили унифицированные сигналы постоянного тока и напряжения.
Классификация унифицированных информационных сигналов ГСП Они используются как для передачи информации от средств получения информации к устройствам управления и от них к исполнительным устройствам, так и для обмена информацией между устройствами управления. В меньшей степени применяются сигналы переменного напряжения. Частотные же сигналы используются главным образом в телемеханической аппаратуре и некоторых специализированных комплекса технических средств.
6.Автоматической системой регулирования (АСР) называется совокупность объекта регулирования и регулятора, взаимодействующих между собой (В.Л.Петров). Технологическая установка, в которой необходимо осуществить регулирование того или иного параметра, называется объектом регулирования. Регулирование автоматическое - разновидность автоматического управления: автоматическое поддержание постоянства или изменение по требуемому закону некоторой физической величины, характеризующей управляемый процесс (БЭС). Регулятор автоматический – устройство (или комплекс устройств) в системе автоматического регулирования, которое вырабатывает воздействие на объект в соответствии с требуемым законом регулирования (БЭС, 2000 г).
Рис. 1 Структурная схема АСР yт – текущее значение регулируемой величины; uз – заданное значение регулируемой величины; zв – возмущающее воздействие; xр – регулирующее воздействие; xр=yт-uз
Для объектов управления (регулирования) различают величины входные xр, zв и выходные yт. Под входными величинами объектов химической технологии понимают изменение расхода вещества, его состава, количество подаваемого тепла и т.п. К выходным величинам относятся температура вещества, его уровень в аппарате, давление, концентрация, влажность и др. Состояние объекта в каждый момент времени определяется значениями выходных величин yт. Для нормального функционирования объекта они должны поддерживаться на определенном заранее заданном значении uз или изменяться по определенной программе. Во время работы выходные величины отклоняются от заданных значений под действием возмущений zв и появляется рассогласование между текущими yт и заданными uз значениями выходных величин объекта. Если при наличии возмущений zв объект самостоятельно обеспечивает нормальное функционирование, т.е. самостоятельно устраняет возникающие рассогласования (yт-uз), то он не нуждается в управлении. Если же объект не обеспечивает выполнение условий нормальной работы, то для нейтрализации влияния возмущений на него налагают управляющее воздействие xр, изменяя с помощью исполнительного устройства материальные или тепловые потоки объекта. Таким образом, в процессе управления на объект наносятся воздействия которые компенсируют возмущения и обеспечивают поддержание нормального режима его работы.
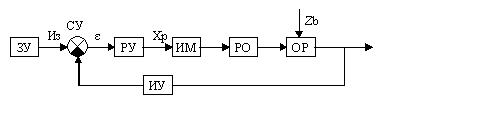
Рис. 2 Одноконтурная АСР В общем случае в состав простейшей АСР должны входить следующие элементы: - объект регулирования (ОР), характеризующийся регулируемой величиной yт; - измерительное устройство (ИУ), измеряющее регулируемую величину и преобразующее ее в форму, удобную для дистанционной передачи; - задающее устройство (ЗУ), из которого поступает сигнал uз, определяющий заданное значение или закон изменения регулируемой величины; - суммирующее устройство (СУ), в котором действительное значение регулируемой величины yт сравнивается с заданным значением и выявляется отклонение - регулирующее устройство (РУ), вырабатывающее при поступлении на его вход отклонения - исполнительный механизм (ИМ) – устройство, непосредственно осуществляющее механическое перемещение (или поворот) регулирующего органа объекта управления (БЭС); - регулирующий орган (РО), служащий для изменения притока вещества или энергии в объект регулирования, осуществляя тем самым регулирующее воздействие на объект; - линия связи, через которые сигналы передаются от элемента к элементу в автоматической системе. Из состава элементов АСР следует, что для автоматической системы характерно наличие замкнутого контура регулирования «объект регулирования – измерительное устройство – суммирующее устройство – регулирующее устройство – исполнительный механизм – регулирующий орган – объект регулирования». На структурной схеме (рис.2) элементы автоматической системы изображены прямоугольниками, в которые вписаны условные обозначения элементов. Суммирующее устройство СУ принять изображать в виде круга, разделенного на секторы, в которые входят суммирующиеся сигналы или из которых выходят результирующие воздействия. Секторы, в которые отрицательные воздействия, зачерняют.
Обратная связь в АСР В замкнутом контуре регулирования (рис. 1) сигнал с выхода объекта поступает на вход регулятора, а выхода регулятора он снова подается на вход объекта связи. Такое соединение двух элементов АСР называется соединением по принципу обратной связи. Выходной сигнал регулятора (регулирующее воздействие) должен компенсировать влияние возмущающего воздействия, т.е. должен действовать на объект в обратном направлении (со знаком «минус») по сравнению с возмущающем воздействием. Такой вид обратной связи, когда сигнал с выхода объекта возвращается регулятором на его вход обратной связи, когда сигнал с выхода объекта возвращается регулятором на его вход с обратным (по отношению к возмущающему воздействию) знаком, называется отрицательной обратной связью. Подключение регулятора к объекту по принципу отрицательной обратной связи придает АСР ценное свойство: регулятор воздействует на объект таким образом, чтобы устранить погрешность регулирования независимо от того, каким возмущающими воздействиями она вызвана.
Рассмотрим действие обратной связи в АСР уровня в емкости.
а клапан 4 изменяет расход жидкости на притоке. Поплавок связан с клапаном через поворотный рычаг 2 и прикрепленный к нему шток 3.
Пусть первоначально расходы на притоке и потребление одинаковы, а уровень равен заданному. Если возникает случайное возмущение, например, потребление уменьшиться, то уровень начнет расти. Если бы обратной связи не существовало, т.е. поплавок не был связан с клапаном, то рост уровня продолжался бы все время, пока потребление из емкости было меньше притока, вплоть до ее переполнения. Действие же обратной связи приводит к тому, что по мере роста уровня клапан будет все больше и больше прикрываться, уменьшая тем самым расход на притоке. Этот расход будет уменьшаться до тех пор, пока не прекратится рост уровня, т.е. снова не наступит равенство притока и потребления. Таким образом, в результате действия обратной связи рост уровня, вызванный возмущением со стороны потребления, прекратится. При этом положение клапана будет отличаться от первоначального (он будет больше прикрыт), а т.к. клапан жестко связан с поплавком, измеряющим уровень, то и значение уровня станет иным, чем заданное. Отсюда следует, что такая АСР уровня компенсирует вредное действие возмущения не полностью: рост уровня прекращается, но он не возвращается к заданному значению. Если в рассмотренном примере изменить конструкцию клапана таким образом, чтобы при движении штока вверх он открывался, а при движении вниз – закрывался, то обратная связь станет положительной. Положительная обратная связь приводит к неустойчивой работе системы, т.е. она противоречит основному назначению АСР – уменьшению рассогласования.
Популярное:
|
Последнее изменение этой страницы: 2016-04-10; Просмотров: 2473; Нарушение авторского права страницы
 =yт –uз;
=yт –uз;  Поплавок 1 перемещается вместе с уровнем,
Поплавок 1 перемещается вместе с уровнем,