
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Лекция 3. Технические устройства систем автоматического регулирования
Измерительные устройства систем автоматического регулирования. Устройства сравнения. Усиливающие устройства. Исполнительные механизмы.
Функциональное назначение основных наиболее типичных устройств САР указано на структурной схеме рис. 4. Эти устройства называют иногда элементами автоматики. Краткое рассмотрение некоторых из них дает представление о возможностях и работе схем автоматизации. Измерительные устройства. Носителем информации в технике является сигнал – заранее оговоренная величина интересующего нас параметра. Измерительные устройства в автоматике предназначены для преобразования измеряемой регулируемой величины в сигнал, удобный для дальнейшего использования. Другое название измерительных устройств: чувствительные элементы, преобразователи, датчики. Чаще всего регулируемая величина преобразуется в электрический сигнал. Работа датчиков основывается на различных физических эффектах. Классифицируются они по измеряемой величине и по конструктивным особенностям или физическому явлению, например: потенциометрический датчик уровня жидкости; датчик Холла (основанный на эффекте Холла) и т. д. Классификация измерительных устройств представлена на рис. 12.
Рис. 12. Классификация измерительных устройств
Неэлектрические величины обычно преобразуют в электрические сигналы, так как измерения электрическими методами имеет ряд преимуществ: – чувствительность датчика может изменяться в широких пределах; – представляется возможность дистанционного измерения; – кроме измерения можно легко осуществить процесс записи; – сигналы можно использовать для управления; – можно использовать вычислительную технику. Измерительное устройство характеризуется чувствительностью и статической характеристикой. Чувствительность датчика это величина, измеряемая отношением изменения выходной величины (У – сигнал) к изменению входной (Х – измеряемая величина) или отношением приращений этих величин:
Зависимость y = f(x) – статическая характеристика датчика. При линейной зависимости y = s ·x чувствительность s постоянна во всем диапазоне измерений. Применение таких датчиков предпочтительнее. Если же статическая характеристика нелинейна, то можно говорить о величине чувствительности лишь в различных диапазонах измерения. По характеру работы при измерении датчики могут быть контактными и бесконтактными. Бесконтактные датчики надежны в работе, так как не подвержены износу, но более чувствительны к различным помехам, вносимым окружающей средой. Измерение электрических величин не требует специальных устройств, а неэлектрические величины преобразуют в электрические сигналы чаще всего с помощью электромеханических преобразователей, используя различные физические эффекты. Многие неэлектрические величины (температура, давление, расход, усилие и др.) легко преобразуются в перемещение какого-либо элемента (например, мембраны), а затем в электрический сигнал с помощью нижеописанных датчиков. Потенциометрический датчик представляет собой переменный резистор, подвижный контакт которого связан с перемещающимся элементом какой-либо конструкции. Потенциометр может использоваться для измерения угловых или линейных перемещений и преобразует перемещение в изменения напряжения Uвых., рис. 13. Если потенциометр проволочный и проволока намотана на каркас с постоянным сечением, то его статическая характеристика линейна и Рис. 13. Потенциометр и схема его включения
В индуктивном датчике часть замкнутого магнитопровода с обмоткой может перемещаться, рис. 14. Увеличение воздушного зазора увеличивает магнитное сопротивление, снижая сопротивление XL обмотки и увеличивая ток. Статическая характеристика индуктивного датчика не является реверсивной, поэтому более широкое применение получил дифференциальный индуктивный датчик. В нем две обмотки с магнитопроводом имеют общий якорь. Обмотки включены в дифференциальную схему, рис. 15.
а) б)
Рис. 15. Дифференциальный индуктивный датчик и его статическая
Для измерений очень малых перемещений (деформаций) применяют тензорезисторы, представляющие собой тонкую проволоку или пленку в виде зигзагообразных петель, заклеенную между листами бумаги, рис. 16. Датчик наклеивается на поверхность исследуемой конструкции и воспринимает деформации наружных волокон материала. Деформация вызывает механические напряжения в проволоке и изменение активного сопротивления датчика. Чувствительность тензодатчика.
где R – активное сопротивление; l – базовая длина проволоки. Статическая характеристика датчика линейная. Тензорезисторы из-за малой величины изменения сопротивления требуют применения специальных измерительных схем и усилителей электрических сигналов. Так как деформация и напряжение связаны законом Гука, то тензометры широко применяют для измерения напряженного состояния материалов. Температуру, какой-либо среды измеряют терморезисторами и термопарами. Материалом для проволочного терморезистора служат медь или платина, конструкция терморезистора (термометра сопротивления) показана на рис. 17.
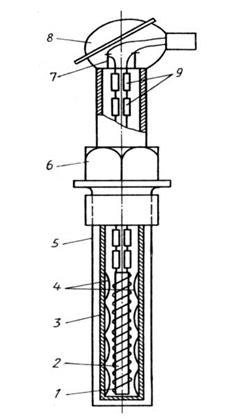
Рис. 17. Термометр сопротивления (терморезистор): 1 – проволока; 2 – каркас; 3 – защитная гильза; 4 – вкладыш для улучшения теплопередачи; 5 – чехол; 6 – штуцер; 7 – изоляционная колодка; 8 – соединительная головка; Применяют также полупроводниковые терморезисторы – термисторы, которые имеют более высокую чувствительность, но низкую точность (отклонения при повторных замерах). Зависимость сопротивления проволочных терморезисторов (Ме) и термисторов (п/п) – статическая характеристика – показана на рис. 18. Термопары чаще всего применяют для измерения температур в несколько сот градусов и выше. Действие термопары основано на возникновении термо-ЭДС в цепи двух разнородных проводников при изменении температуры их спая, когда температура других концов постоянна. Достоинством термопары является в отличие от всех вышеописанных датчиков то, что нет необходимости в источнике питания. Недостаток – невысокая чувствительность (0, 6–7 мВ/град). Термопара имеет линейную статическую характеристику в диапазоне рекомендованных для измерения ею температур. Термопары помещаются в такие же корпуса, как и термосопротивления (см. рис. 17).
Фотодиод может работать в двух режимах: фотогенераторном – без дополнительного источника (этот режим используют для солнечных батарей) и фотодиодном. В последнем случае к фотодиоду прикладывают напряжение в запирающем направлении и таким способом увеличивают мощность полезного сигнала. Недостатком фотодиодов является их температурная зависимость. Для преобразования светового потока в электрический сигнал используют также фототранзисторы и фототиристоры. Для измерения частоты вращения валов в электроприводах применяют тахогенераторы постоянного и переменного тока. Тахогенератор постоянного тока представляет собой миниатюрный генератор с возбуждением от постоянного магнита. Статическая характеристика тахогенератора постоянного тока линейна и реверсивна, рис. 21. Недостатки тахогенераторов те же, что и у других машин постоянного тока.
Рис. 21. Схема тахогенератора постоянного тока (а) и его характеристика (б)
Тахогенераторы переменного тока не имеют коллектора и более просты по конструкции. Однако их характеристика нереверсивна, т. к. при изменении направления вращения меняется фаза генерируемого переменного тока. Применяют генераторы переменного тока в тех случаях, когда реверс вала исключается, например с тепловым двигателем. При осуществлении логических операций, ограничения хода движущихся элементов или задания граничных условий измерений, переводимых в перемещение, применяют путевые выключатели (контактные датчики или конечные выключатели). Конструкция такого датчика показана на рис. 22. Статическая характеристика такого датчика нелинейна и дискретна (рис. 23). По мере появления новых материалов и изучения физических эффектов конструкции применяемых датчиков непрерывно совершенствуется, а область их применения расширяется.
Рис. 22. Конечный выключатель:
Рис. 23. Статическая характеристика контактного датчика
Устройства сравнения. В качестве устройств сравнения в системах регулирования с электрическими сигналами используются широко известные мостовые схемы для постоянного тока и дифференциальные для переменного, а также схемы с операционными усилителями, так называемые компараторы. Усиливающие устройства. В подавляющем большинстве случаев сигналы, получаемые с датчиков, малы и недостаточны для управления исполнительными механизмами. Таким образом, возникает необходимость в усилителях. Усилителем называется устройство, увеличивающее мощность сигнала за счет энергии дополнительного источника. Физическая природа сигнала при этом остается неизменной. Если при усилении форма сигнала не изменяется, то это усилитель с линейным режимом работы, а если меняется (усиление среднего значения), то – с нелинейным. Так как электрическая мощность определяется током и напряжением (S=I·U), то увеличение мощности сигнала осуществляют за счет последовательного увеличения сначала напряжения, а потом тока. Усилители, которые увеличивают мощность за счет увеличения напряжения, называют предварительными, а за счет тока – усилителями мощности. Предварительное усиление в настоящее время обычно осуществляют с помощью схем с операционными усилителями, а для усиления мощности применяют схемы на транзисторах или тиристорах. Так как при металлообработке чаще всего управляют электроприводом, то широко применяют в качестве усилителей мощности схемы с нелинейным режимом работы. Неэлектрические усилители (гидравлические и пневматические) имеют похожую конструкцию плунжерного типа с золотником или струйной трубкой, рис. 24.
а) б) Рис. 24. Двойной гидравлический усилитель с плунжером и струйными трубками
Если в качестве входного используется электрический сигнал, то усилие для перемещения золотника или струйной трубки обеспечивается электромагнитом или электроприводом. В этом случае гидроусилитель называется электрогидравлическим. То же и для пневматических усилителей. Исполнительные механизмы. Исполнительный механизм предназначен для управления регулирующим органом (РО), те есть должен обеспечить перемещения каких-либо элементов РО, которые делает человек при ручном управлении. В качестве исполнительных механизмов чаще всего применяют электромагниты, электромагнитные муфты (рис. 25) и электродвигатели постоянного тока с независимой или последовательной обмоткой возбуждения, а также шаговые электродвигатели, рис. 26.
Рис. 25. Электромагнитная муфта: 1 – наружная обмотка (индуктор); 2 – якорь;
Работа шагового двигателя заключается в последовательном подключении статорных обмоток. Таким образом, осуществляется перемещение на шаг ротора, определяемый углом сдвига его зубцов. После подключения секции обмотки статора ротор, представляющий собой постоянный магнит, стремится занять положение, при котором его зубцы будут напротив полюсов подключенной секции статора. Недостаток шаговых двигателей – относительная сложность схемы управления, которая должна обеспечить последовательную подачу импульсов на статорные обмотки.
Рис. 26. Шаговый электродвигатель
Кроме описанных элементов автоматики, в схемах могут быть преобразующие устройства для преобразования формы сигнала. Схемные решения таких устройств рассматриваются в «Промышленной электронике» или в соответствующих разделах других курсов.
Популярное:
|
Последнее изменение этой страницы: 2016-04-11; Просмотров: 1132; Нарушение авторского права страницы

 , или
, или  , или
, или  .
. .
.



 Рис. 14. Индуктивный датчик и его статическая характеристика
Рис. 14. Индуктивный датчик и его статическая характеристика
 Индуктивные датчики преобразуют в электрический сигнал только малые перемещения (до 2–3 мм), но часто этого достаточно для регулирования. Для повышения чувствительности и снижения габаритов индуктивного датчика частоту переменного тока источника питания повышают до 400-600 Гц.
Индуктивные датчики преобразуют в электрический сигнал только малые перемещения (до 2–3 мм), но часто этого достаточно для регулирования. Для повышения чувствительности и снижения габаритов индуктивного датчика частоту переменного тока источника питания повышают до 400-600 Гц. ,
, 

 Для измерения относительно небольших перемещений используют также фотоэлектрические датчики. Наиболее распространенными являются фоторезисторы и фотодиоды. Фотоэлектрические датчики используют в тех случаях, если перемещение может быть связано с изменением светового потока. В фоторезисторе полупроводниковый слой обладает свойством внутреннего фотоэффекта. Характеристика фоторезистора, показывающая зависимость тока через него от освещенности, показана на рис. 19.
Для измерения относительно небольших перемещений используют также фотоэлектрические датчики. Наиболее распространенными являются фоторезисторы и фотодиоды. Фотоэлектрические датчики используют в тех случаях, если перемещение может быть связано с изменением светового потока. В фоторезисторе полупроводниковый слой обладает свойством внутреннего фотоэффекта. Характеристика фоторезистора, показывающая зависимость тока через него от освещенности, показана на рис. 19. Недостатком фоторезистора является большая инерционность, что исключает применение при быстром изменении светового потока. Этого недостатка лишены фотодиоды – полупроводниковые приборы с вентильным фотоэффектом. Световая характеристика фотодиода показана на рис. 20.
Недостатком фоторезистора является большая инерционность, что исключает применение при быстром изменении светового потока. Этого недостатка лишены фотодиоды – полупроводниковые приборы с вентильным фотоэффектом. Световая характеристика фотодиода показана на рис. 20.




