
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Способы возбуждения электродвигателей постоянного токаСтр 1 из 3Следующая ⇒
Лекция №9 Двигатели постоянного тока Способы возбуждения электродвигателей постоянного тока Двигатели постоянного тока используются в промышленности в случае необходимости регулирования скорости ЭП (электропривода). В основном применяются системы УВ-Д (управляемый выпрямитель-двигатель), которые обеспечивают регулирование скорости с высоким качеством. По способу возбуждения электрические двигатели постоянного тока делят на четыре группы: 1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока. 2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря. 3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой. 4. Двигатели со смешанным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Двигатели с независимым возбуждением и параллельным возбуждением обладают одинаковыми свойствами, поэтому эти группы объединяют и относят к одной группе: двигатели с независимым возбуждением предназначенные для работы в регулируемых ЭП. Промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П и 4П, они подразделяются по следующим признакам: - по габаритам; - по способу защиты; - по мощности; - по скорости вращения; - по напряжению на якоре (110В, 220В, 340В, 440В); - на напряжению обмотке возбуждения (110 и 220 В); и др. Если напряжение на якоре и на обмотке возбуждения (ОВ) совпадают, то обмотка возбуждения подключается параллельно обмотке якоря. Кроме серий 2П и 4П выпускаются и другие специализированные серии.
Схемы возбуждения электродвигателей постоянного тока показаны на рисунке.
Рис. 9.1 Схемы возбуждения электродвигателей постоянного тока: а - независимое, б - параллельное, в - последовательное, г - смешанное
Основные формулы и уравнения Если принять скорость вращения якоря в системе СИ (рад/с), то формула 4.13 из лекции №4 примет вид
(9.1) где Еа - ЭДС машины постоянного тока k - постоянная для данной машины величина в системе СИ Ф — основной магнитный поток, Вб; ω - частота вращения якоря, рад/с; р - число пар полюсов обмотки якоря; N - число пазовых сторон обмотки якоря; а - число пар параллельных ветвей обмотки якоря;
(9.2) где
М - электромагнитный момент машины постоянного тока, Н/м (ньютон делить на метр) k - постоянная для данной машины величина; Ф — основной магнитный поток, Вб (вебер) р - число пар полюсов обмотки якоря N - число пазовых сторон обмотки якоря а - число пар параллельных ветвей обмотки якоря Iа или просто I — ток якоря, А;
Для двигателя, работающего с постоянной частотой вращения, можно получить уравнение напряжений (Э.Д.С.) для цепи якоря генератора: Это уравнение получают на основании второго закона Кирхгофа
Здесь
— сумма сопротивлений всех участков цепи якоря: - обмотки якоря rа или, rя - обмотки добавочных полюсов rд, - компенсационной обмотки rко, - последовательной обмотки возбуждения rс - переходного щеточного контакта rщ.
При отсутствии в машине каких-либо из указанных обмоток в (9.4) не входят соответствующие слагаемые.
Из (9.3) следует, что подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря. На основании (9.3) получим формулу тока якоря
Умножив обе части уравнения (9.3) на ток якоря Iа, получим уравнение мощности для цепи якоря:
тогда
ω — угловая частота вращения якоря;
Следовательно, выражение
Рабочие характеристики
Рабочие характеристики двигателя представлены на рис 9.2б Частота вращения двигателя с ростом нагрузки Р2 уменьшается, а график ω = f(Р2) приобретает падающий вид. Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.
Изменение частоты вращения двигателя при переходе от номинальной нагрузки к х.х., выраженное в процентах, называют номинальным изменением частоты вращения:
или ∆ ω ном=
где Обычно для двигателей параллельного возбуждения ∆ ω ном =2-8%, поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой. Зависимость полезного момента График зависимости Мэл= f(Р2) проходит параллельно кривой М2= f(Р2). Пуск двигателя
Ток якоря двигателя определяется формулой
В начальный момент пуска якорь двигателя неподвижен и в его обмотке не индуцируется ЭДС Еа=0. Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток
Iп= . Обычно сопротивление Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. И наконец, этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть. Поэтому пуск двигателя непосредственным подключением в сеть (безреостатный пуск) обычно применяют для двигателей мощностью не более 0, 7—1, 0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3—5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты (ПР), включаемые последовательно в цепь якоря (реостатный пуск). Перед пуском двигателя необходимо реостат ввести, т.е поставить наибольшее сопротивление. Затем включают рубильник и постепенно уменьшают сопротивление реостата.
Рис. 9.4. Схема включения пускового реостата
Пусковой ток якоря при полном сопротивлении пускового реостата
Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2—3 раза. Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызвало бы значительные потери энергии. Кроме того, пусковые реостаты были бы громоздкими. Поэтому в двигателях большой мощности применяют безреостатный пуск двигателя путем понижения напряжения. Примерами этого являются пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске на параллельное при нормальной работе или пуск двигателя в схеме «генератор—двигатель».
Реверсирование двигателей
Реверсирование двигателя - это изменение направления вращения якоря. Реверсирование двигателя осуществляется либо изменением полярности напряжения на обмотке якоря, либо на обмотке возбуждения. В обоих случаях изменяется знак электромагнитного момента двигателя Мэм и соответственно направление вращения якоря.
КПД машин постоянного тока
η = P2/P1, (9.20)
где - Р2 — полезная мощность машины (у генератора — это электрическая мощность, отдаваемая приемнику, у двигателя — механическая мощность на валу); - Р1 — подводимая к машине мощность (у генератора — это механическая мощность, сообщаемая ему первичным двигателем, у двигателя — мощность, потребляемая им от источника постоянного тока; если генератор имеет независимое возбуждение, то P1 включает в себя также мощность, необходимую для питания цепи обмотки возбуждения).
Очевидно, мощность Р1 может быть выражена следующим образом: Р1 = Р2 + Σ Δ P, где Δ P — сумма перечисленных выше потерь мощности.
С учетом последнею выражения
η = P2/(P2 + Σ Δ P). (9.21)
Когда машина работает вхолостую, полезная мощность Р2 равна нулю и η = 0. Характер изменения КПД при увеличении полезной мощности зависит от значения и характера изменения потерь мощности. Примерный график зависимости η =f(Р2) приведен на рис. 9.5. При увеличении полезной мощности КПД сначала возрастает при некотором значении Р2, достигает наибольшего значения, а затем уменьшается. Последнее объясняется значительным увеличением переменных потерь, пропорциональных квадрату тока. Машины рассчитывают обычно таким образом, чтобы наибольшее значение КПД находилось в области, близкой к номинальной мощности Р2ном. Номинальное значение КПД машин мощностью от 1 до 100 кВт лежит примерно в пределах от 0, 74 до 0, 92 соответственно.
Литература: Кацман М.М. Электрические машины. Глава 29. §29.1, 29.2, 29.3, 29.4, 29.5, 29.6, 29.8, 29.10 Лекция №9 Двигатели постоянного тока Способы возбуждения электродвигателей постоянного тока Двигатели постоянного тока используются в промышленности в случае необходимости регулирования скорости ЭП (электропривода). В основном применяются системы УВ-Д (управляемый выпрямитель-двигатель), которые обеспечивают регулирование скорости с высоким качеством. По способу возбуждения электрические двигатели постоянного тока делят на четыре группы: 1. С независимым возбуждением, у которых обмотка возбуждения НОВ питается от постороннего источника постоянного тока. 2. С параллельным возбуждением (шунтовые), у которых обмотка возбуждения ШОВ включается параллельно источнику питания обмотки якоря. 3. С последовательным возбуждением (сериесные), у которых обмотка возбуждения СОВ включена последовательно с якорной обмоткой. 4. Двигатели со смешанным возбуждением (компаундные), у которых имеется последовательная СОВ и параллельная ШОВ обмотки возбуждения.
Двигатели с независимым возбуждением и параллельным возбуждением обладают одинаковыми свойствами, поэтому эти группы объединяют и относят к одной группе: двигатели с независимым возбуждением предназначенные для работы в регулируемых ЭП. Промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П и 4П, они подразделяются по следующим признакам: - по габаритам; - по способу защиты; - по мощности; - по скорости вращения; - по напряжению на якоре (110В, 220В, 340В, 440В); - на напряжению обмотке возбуждения (110 и 220 В); и др. Если напряжение на якоре и на обмотке возбуждения (ОВ) совпадают, то обмотка возбуждения подключается параллельно обмотке якоря. Кроме серий 2П и 4П выпускаются и другие специализированные серии.
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 3954; Нарушение авторского права страницы

 Фω =kФω
Фω =kФω

 . (9.3)
. (9.3) (9.4)
(9.4) . (9.5)
. (9.5) , (9.6)
, (9.6) , (9.7)
, (9.7) (9.8)
(9.8) — электромагнитная мощность двигателя.
— электромагнитная мощность двигателя. представляет собой электромагнитную мощность двигателя.
представляет собой электромагнитную мощность двигателя. , (9.12)
, (9.12) 100
100 0 (n0) — частота вращения двигателя в режиме х.х.
0 (n0) — частота вращения двигателя в режиме х.х. от нагрузки установлена формулой
от нагрузки установлена формулой  . При
. При  график
график  имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость
имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость  криволинейна.
криволинейна.  (9.13)
(9.13)  невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя.
невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя.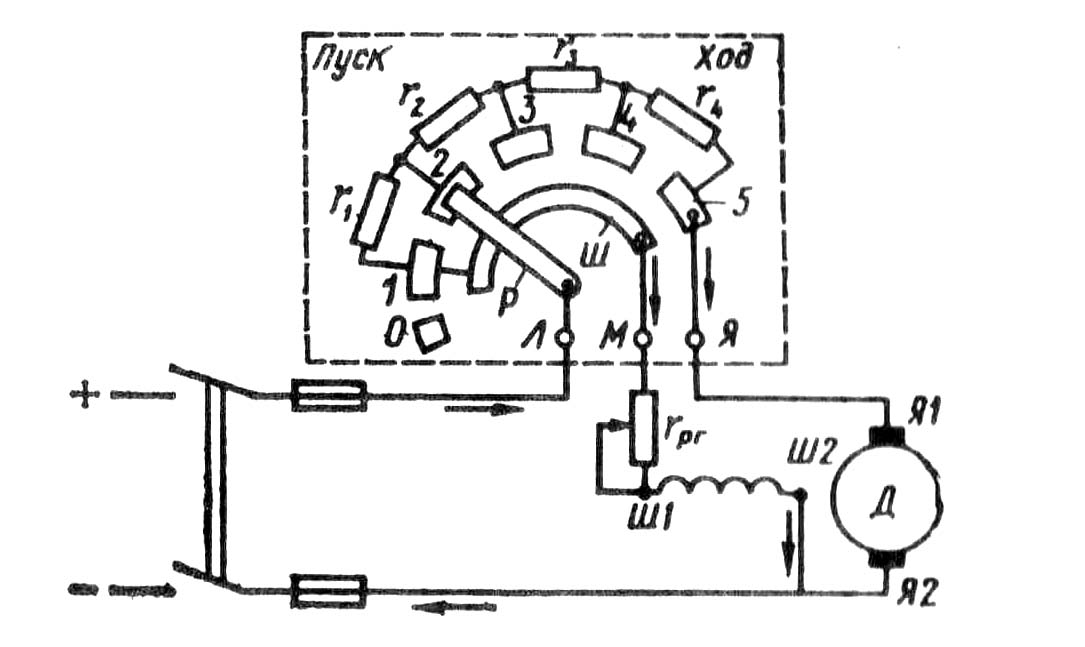
 . (9.14)
. (9.14)