
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
А. И. Черевко. Расчет и выбор судовых силовых трансформаторов для полупроводниковых преобразователей. Севмашвтуз, 2007.
3. П. П. Акимов. Силовые установки морских судов. Москва, «Транспорт» 4. А. Л. Кислицин. Трансформаторы. Уч. пособие. Ульяновск, 2001.
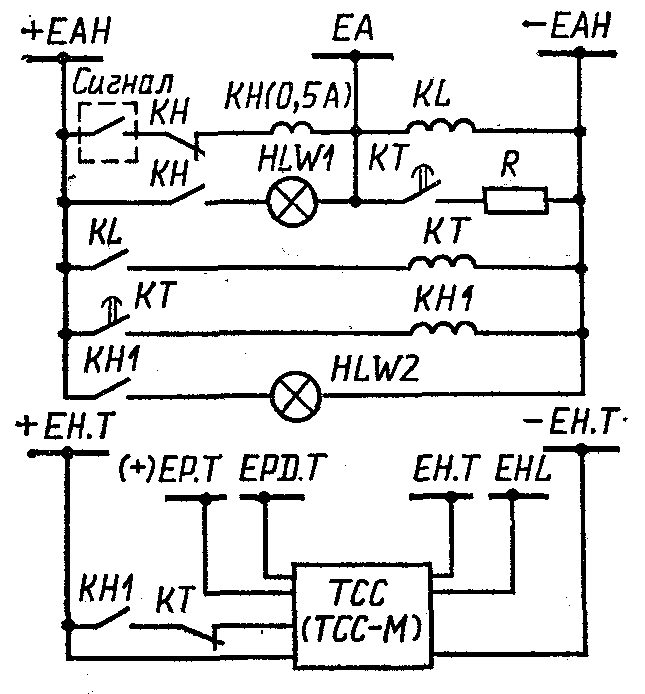
Лабораторная работа №2 «Исследование работы коммутационной схемы аварийной световой и звуковой сигнализации» Цель практического занятия: 1. Изучение основного принципа построения световой и звуковой системы сигнализации работоспособности судового электрооборудования. 2. Решение ситуационных задач по использованию имеемых технических средств в системе аварийно-предупредительной сигнализации судового электрооборудования. 3. Исследование рабочих схем судового электрооборудования в комплексе с системами аварийно-предупредительной сигнализации.
Используемые практические схемы:
1.
2.
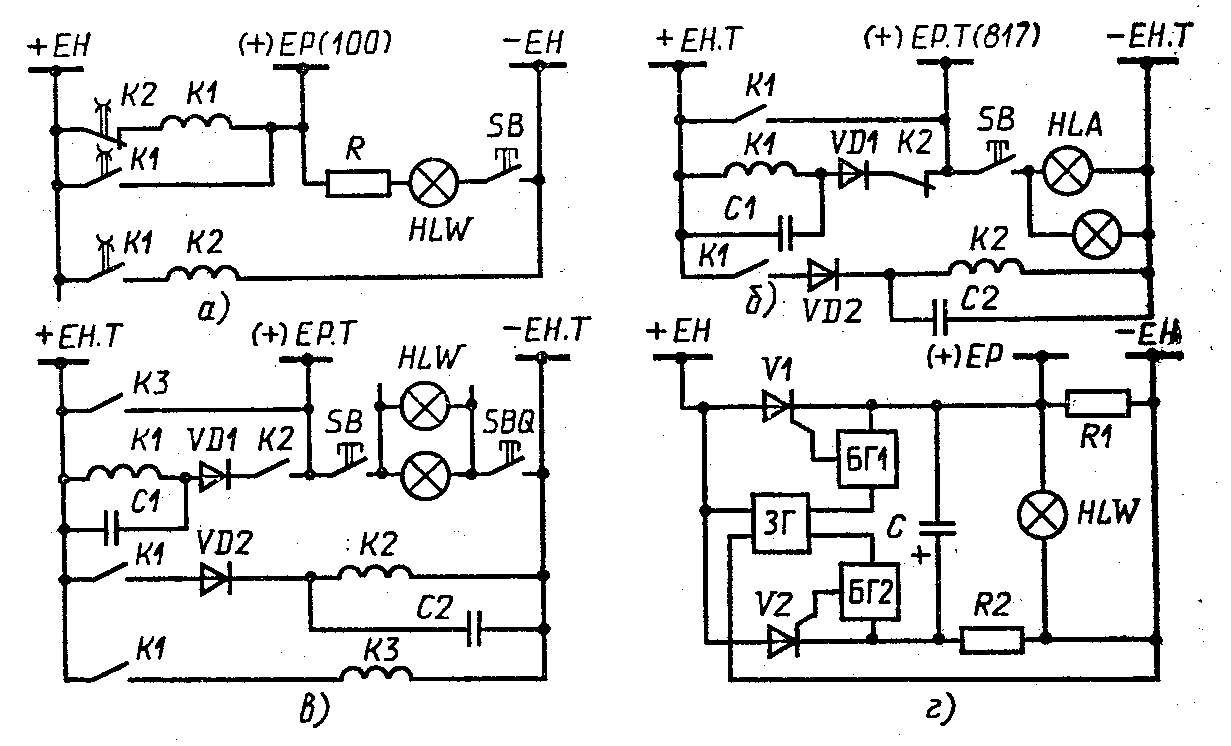
1. Теоретическая часть Световая сигнализация положения коммутационных аппаратов выполняется двухламповой: одна лампа — «Включено», другая — «Отключено». Лампы могут светиться («светлый щит») или быть нормально погашенными («темный щит»). При темном щите дежурный может зажечь лампы, а при аварийном отключения - присоединения происходит автоматическое включение ламп сигнализации положения. Светозвуковая предупредительная сигнализация об отклонении от нормального режима выполняется аналогично технологической аварийной сигнализации, но звонком другого тембра.
Таблица 1. Наименование и маркировка шинок в схемах сигнализации
Автоматические выключатели в цепях сигнализации должны быть отстроены от максимальных нагрузок, которые возможны. Наибольшая нагрузка обычно возникает при опробовании светового табло.
2. Вопросы к обсуждению:
1. Изучение основного принципа построения световой и звуковой системы сигнализации работоспособности судового электрооборудования. 2. Решение ситуационных задач по использованию имеемых технических средств в системе аварийно-предупредительной сигнализации судового электрооборудования. 3. Исследование рабочих схем судового электрооборудования в комплексе с системами аварийно-предупредительной сигнализации.
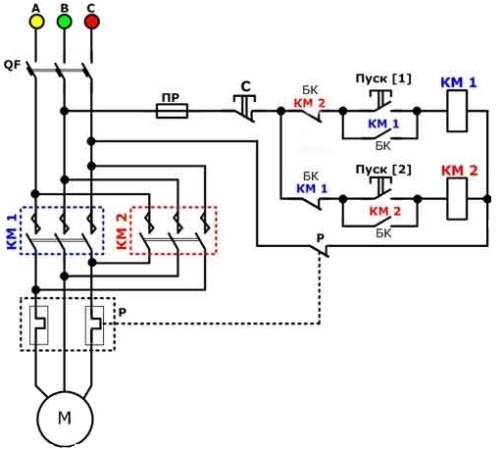
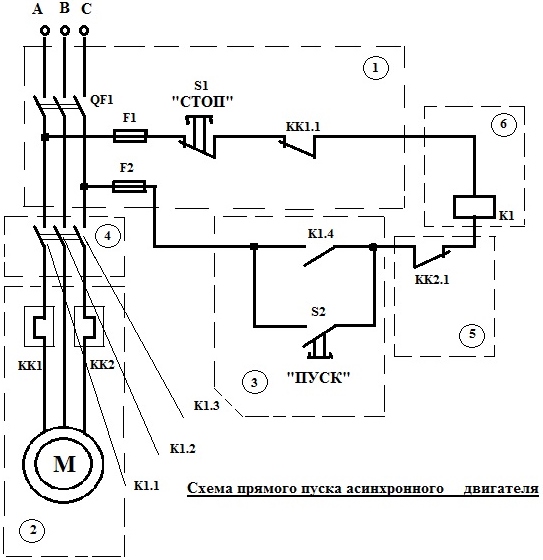
1. Собрать схему прямого пуска асинхронного электродвигателя. 2. Предусмотреть световую сигнализацию: · включения питания бортовой сети · пуск двигателя (при этом световая сигнализация бортовой сети выключается) · аварийная световая сигнализация обрыва одной из питающих фаз электродвигателя
3. Собрать схему реверсивного включения асинхронного электродвигателя. 4. Предусмотреть световую сигнализацию: · включения питания бортовой сети · пуск двигателя в режиме «Вперед» · пуск двигателя в режиме «Вперед» Примечание: При включении ВПЕРЕД или НАЗАД световая сигнализация бортовой сети должна отключаться · аварийная световая сигнализация обрыва одной из питающих фаз электродвигателя Перечень рекомендуемых учебных изданий. 1. Испытания асинхронных двигателей при ремонте. Слоним Н.М., 1980 2. Асинхронные электродвигатели. Архипцев Ю.Ф., 1986. 3. Электрические машины. Асинхронные машины. Радин В.И., 1988. 4. Электродвигатели асинхронные. Лихачев В.Л., 2002.
Лабораторная работа № 3 «Исследование работы тиристорного преобразователя частоты» Цель занятия – закрепление и расширение знаний студента по общему устройству судна, назначению и размещению на судне различного оборудования, а также знакомство с судовой терминологией.
1. Теоретическая часть. Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде. Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением
неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Во многих механизмах предпочтительной является средняя и даже низкая скорость вращения вала электродвигателя, т.к. при этом, во-первых, легче позиционировать исполнительный орган с необходимой точностью, во- вторых, проще контролировать сам процесс и, в-третьих, можно обойтись без механического редуктора. Известно, что у коллекторных электродвигателей постоянного тока вращающий момент пропорционален напряжению, поданному на двигатель. Однако, чем больше это напряжение, тем выше скорость вращения вала двигателя. В металлообрабатывающих станках и некоторых других механизмах для сохранения высокого момента вращения вала применяют механические редукторы, реализованные на основе зубчатых или ременных передач. В простых механизмах для получения высокого момента вращения требуется увеличить напряжение, подаваемое на двигатель, что, в свою очередь, приводит к увеличению скорости вращения. Поскольку момент сопротивления напрямую зависит, например, от диаметра сверла или захода резца, существует определённое противоречие: для точности позиционирования требуется пониженная скорость вращения дрели, а для использования сверла большого диаметра – увеличение скорости. Однако это противоречие можно разрешить простым и эффективным способом. Чтобы было понятно, о чём идет речь, необходимо рассмотреть регуляторы напряжения, подаваемого на электродвигатель. Мощный линейный стабилизатор с возможностью регулирования выходного напряжения (см. рис. 1) был использован для регулирования скорости вращения вала электродрели постоянного тока D0600 фирмы DONAU мощностью около 40 Вт. Регулятор скорости состоит из сетевого трансформатора с выходным напряжением в 12…18 В, мостового выпрямителя (см. рис. 1а) и подключенного к нему линейного стабилизатора на базе мощного полевого транзистора (см. рис. 1б). Недостаток схемы заключается в том, что при установке даже средней скорости вращения дрель способна работать со свёрлами диаметром не более 1, 5 мм.
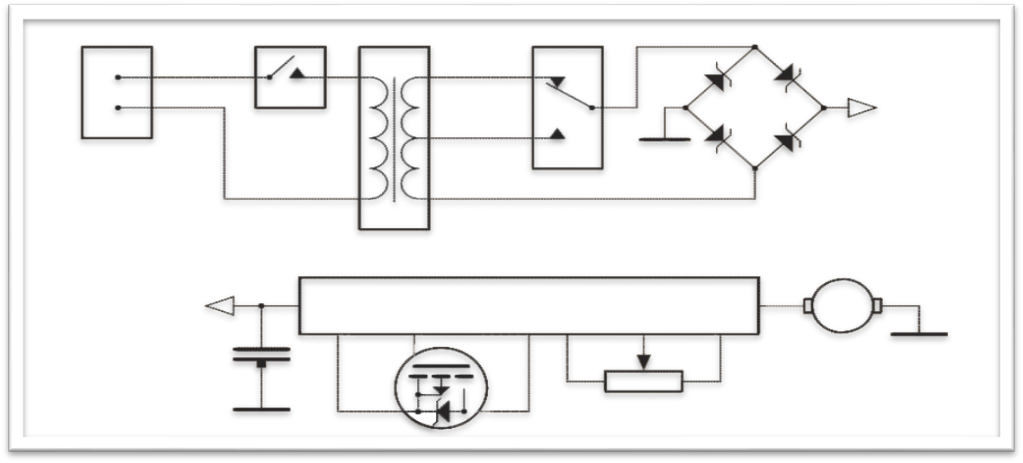
Рис. 1. Регулятор скорости вращения вала двигателя постоянного тока на основе линейного стабилизатора [1] а – блок питания, б – линейный стабилизатор напряжения
Существует другой принцип регулирования скорости вращения коллекторного электродвигателя постоянного тока, основанный на подаче пульсирующего напряжения, полученного с вторичной обмотки сетевого трансформатора (см. рис. 1а). Если это напряжение подать на двигатель через тиристор, фазой включения которого можно управлять, то из каждой полуволны синусоиды будет «вырезаться» определённая площадь, которой и будет пропорциональна скорость вращения дрели. Тиристорные схемы регулирования скорости вращения вала электродвигателей достаточно распространены, хорошо известны и часто построены таким образом, что, наряду с регулировкой скорости, обеспечивают её стабилизацию при изменении момента сопротивления вращению вала. Как правило, для стабилизации скорости вращения используется два варианта схемы.
2. Вопросы к обсуждению: 1) Линейный стабилизатор с возможностью регулирования выходного напряжения. 2) Принцип регулирования скорости вращения коллекторного электродвигателя постоянного тока. 3) Тиристорные схемы регулирования скорости вращения вала.
3. Задание. 1) Собрать схему регулятора скорости вращения вала электродвигателя постоянного тока на основе линейного стабилизатора. 2) Произвести контрольный запуск. 3) Произвести практическое подключение нагрузки (использовать электродвигатель электродрели) и проверить диапазон регулирования скорости вращения.
Перечень рекомендуемых учебных изданий. 1. Кацман М. М. Электрический привод. Учебник. Издательский центр «Академия» Москва, 2013. 2. Кацман М. М. «Справочник по электрическим машинам» Учеб. пособие для студ. образоват. учреждений сред. проф. образования. М.: Издательский центр «Академия», Москва, 2005. 3. Васин В. М. «Электрический привод» - М.: Высш. шк., 1984. 4. Чекунов К. А. «Судовые электроприводы и электродвижение судов». Изд. «Судостроение». 1980. 5. Электродвигатели (каталог) – ШХТК, 2002.
Лабораторная работа №4 «Режимы пуска, торможения и регулировании оборотов электрических машин переменного тока. Генераторный тормозной режим (рекуперативный) с отдачей энергии в сеть» Цель занятия – закрепить практические знания при обслуживании электрических машин переменного тока в процессе эксплуатации. Снятие данных и построение механической характеристики в режиме динамического торможения асинхронного электродвигателя с фазным ротором.
1. Теоретическая часть. Электромагнитный момент асинхронного двигателя:
где
 и и  - приведенные значения активного и индуктивного сопротивлений обмотки ротора (Ом) - приведенные значения активного и индуктивного сопротивлений обмотки ротора (Ом)
где
В выражении электромагнитного момента (1) единственной переменной величиной, влияющей на электромагнитный момент М, является скольжение S. Поэтому, задавшись рядом значений скольжения и рассчитав для каждого из них величину момента, а затем, пересчитав эти значения скольжения на частоту вращения ротора

Анализируя полученную характеристику, видим, что для асинхронного двигателя возможно три режима работы: 1. Двигательный (основной) режим – при частоте вращения ротора 2. Режим рекуперативного торможения (генераторный режим) – при частоте вращения ротора 3. Режим торможения противовключением – при частоте вращения ротора На механической характеристике отмечены следующие характерные точки:
Критическая частота вращения определяется путем расчета критического скольжения
с последующим пересчетом на частоту вращения
Максимальное значение момента асинхронного двигателя (Н·м)
В приведенных выражениях знак плюс соответствует двигательному режиму работы, а знак минус – генераторному режиму работы асинхронного двигателя. При практических расчетах удобно пользоваться упрощенным выражением электромагнитного момента асинхронного двигателя:
При расчетах значений момента М, соответствующих рабочему участку механической характеристики Для расчета критического скольжения удобно воспользоваться выражением
которое позволяет рассчитать Здесь
Свойства асинхронных двигателей определяются их механическими характеристиками
При введении в цепь ротора электродвигателя добавочного резистора
находят значения скольжений, соответствующие работе электродвигателя при включенном в цепь ротора добавочном резисторе сопротивлением При построении механических характеристик по данным, полученным после расчетов по приведенным выше формулам, необходимо предварительно пересчитать значения скольжения на частоту вращения (об/мин). При построении механических характеристик по опытным данным такого пересчета не требуется, так как частота вращения ротора измеряется непосредственно. Асинхронный двигатель, кроме двигательного (основного), имеет еще три тормозных режима: 1. Генераторный тормозной (рекуперативный) с отдачей энергии в сеть. 2. Торможения противовключением. 3. Динамического томожения.
Динамическое торможение асинхронного двигателя осуществляется следующим образом: обмотку статора отключают от трехфазной сети и быстро подключают два провода к источнику постоянного тока. Постоянный ток, проходя по обмотке статора. Образует магнитное поле, неподвижное относительно сердечника статора. Но так как ротор двигателя продолжает вращение по инерции, то это магнитное поле индуцирует в обмотке ротора переменный ток. Взаимодействие тока ротора с магнитным полем статора создает тормозной момент, величина которого определяется значениями МДС обмотки статора, активного сопротивления обмотки ротора и частоты вращения ротора. Торможение длится до полной остановки ротора. Для более эффективного торможения в цепь ротора вводят активное сопротивление. Механические характеристики асинхронного двигателя в режиме динамического торможения располагаются во втором квадранте осей координат:
2. Вопросы к обсуждению: Три режима работы асинхронного двигателя: 1. Двигательный (основной) режим – при частоте вращения ротора 2. Режим рекуперативного торможения (генераторный режим) – при частоте вращения ротора 3. Режим торможения противовключением – при частоте вращения ротора
1. Лабораторная установка для опытного получения данных механических характеристик асинхронного двигателя с фазным ротором:
2. Комплект электромонтажного инструмента. 3. Расходный электромонтажный провод сечением 2, 5 мм2
Порядок выполнения работы 1. Ознакомившись с лабораторной установкой, следует записать данные электрических машин. Электродвигатель М Номинальная мощность Номинальное напряжение Номинальная частота вращения Номинальный ток статора Максимальный момент Перегрузочная способность Активное сопротивление обмотки ротора Добавочное сопротивление в цепи ротора
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1458; Нарушение авторского права страницы


 (1)
(1) - напряжение (фазное), подведенное к обмотке статора (В)
- напряжение (фазное), подведенное к обмотке статора (В) - частота в обмотке статора (Гц)
- частота в обмотке статора (Гц) и
и  – активное и индуктивное сопротивление обмотки статора (Ом)
– активное и индуктивное сопротивление обмотки статора (Ом) – синхронная частота вращения (об/мин)
– синхронная частота вращения (об/мин) – частота вращения ротора (об/мин)
– частота вращения ротора (об/мин)
 ;
;  .
. - пусковой момент асинхронного двигателя;
- пусковой момент асинхронного двигателя;  – максимальный момент двигательного режима;
– максимальный момент двигательного режима;  – критическая частота вращения двигательного режима, т. е. частота вращения, соответствующая максимальному моменту
– критическая частота вращения двигательного режима, т. е. частота вращения, соответствующая максимальному моменту  – максимальный момент генераторного режима (режима рекуперативного торможения);
– максимальный момент генераторного режима (режима рекуперативного торможения);  – критическая частота вращения генераторного режима, соответствующая максимальному моменту
– критическая частота вращения генераторного режима, соответствующая максимальному моменту  – пограничная частота вращения, соответствующая переходу двигательного режима асинхронной машины в генераторный. Представляет собой частоту вращения идеального холостого хода двигателя.
– пограничная частота вращения, соответствующая переходу двигательного режима асинхронной машины в генераторный. Представляет собой частоту вращения идеального холостого хода двигателя. (2)
(2)  . (3)
. (3) (4)
(4)  (5)
(5) , по (5) возможная ошибка не превышает допустимого значения.
, по (5) возможная ошибка не превышает допустимого значения. , (6)
, (6) по данным каталога.
по данным каталога. – перегрузочная способность электродвигателя.
– перегрузочная способность электродвигателя. , которые могут быть естественными
, которые могут быть естественными  и искусственными
и искусственными  .
.  работа двигателя происходит в соответствии с искусственной характеристикой. Построение такой характеристики ведется на основании естественной характеристики: задавшись рядом значений момента, определяют соответствующие каждому из них значения скольжения по естественной характеристике, а затем по выражению
работа двигателя происходит в соответствии с искусственной характеристикой. Построение такой характеристики ведется на основании естественной характеристики: задавшись рядом значений момента, определяют соответствующие каждому из них значения скольжения по естественной характеристике, а затем по выражению (7)
(7) . В выражении (7)
. В выражении (7)  .
. …………………………………………………. кВт
…………………………………………………. кВт ……………………………………………........В
……………………………………………........В …………………………………….об/мин
…………………………………….об/мин ………………………………………………….А
………………………………………………….А ………………………………………………….Н·м
………………………………………………….Н·м
 …………………………………Ом
…………………………………Ом