
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Нагрузочные машины НМ1 и НМ2
Номинальная мощность Номинальное напряжение Номинальная частота вращения Номинальный ток якоря Номинальный ток возбуждения
Трехфазная асинхронная машина Номинальная мощность Номинальное напряжение Номинальный ток статора Номинальная частота вращения
2. Снятие данных и построение механической характеристики в режиме динамического торможения. Переключателем QS1 отключают двигатель М от трехфазной сети и подключают две его фазы к сети постоянного тока, т. е. переключатель переводят из положения 1 в положение 2 ( см. рис. 3). Регулировочный реостат РР следует оставить введенным – опыт проводят с добавочным сопротивлением в цепи фазного ротора. Напряжение постоянного тока должно быть таким, чтобы ток в обмотке статора не превысил допустимого значения. Затем, увеличивая ток возбуждения машины НМ2, приводят во вращение машину НМ1. Работая в двигательном режиме, она вращает ротор исследуемого электродвигателя. В результате электромагнитных процессов, обусловленных вращением ротора в неподвижном магнитном поле статора, ротор электродвигателя испытывает электродинамический тормозной момент. Постепенно увеличивая частоту вращения ротора двигателя М, доводят ее значение до
Тормозной момент находят по Используя опытные данные из таблицы 1 строят механическую характеристику для заданного режима работы и торможения.
Перечень рекомендуемых учебных изданий. 8. Кацман М. М. «Справочник по электрическим машинам» Учеб. пособие для студ. образоват. учреждений сред. проф. образования. М.: Издательский центр «Академия», Москва, 2005. 9. Кацман М. М. «Электрические машины». – М.: Издательский центр «Академия», 2003. 10. Кацман М. М. «Руководство к лабораторным работам по электрическим машинам и электроприводу». – М.: Высшая школа, 2001. 11. Кацман М. М. «Электрические машины автоматических устройств». – М.: «Форум», 2002. 12. Келим Ю. М. «Типовые элементы систем автоматического управления». – М.: «Форум», 2002. 13. Москаленко В. В. «Электрический привод». – М.: «Мастерство», 2000. 14. Электродвигатели (каталог) – ШХТК, 2002.
Лабораторная работа №6 «Режимы пуска, торможения и регулирования оборотов электрических машин переменного тока. Режим динамического томожения» Цель занятия – закрепить практические знания при обслуживании электрических машин переменного тока в процессе эксплуатации. Снятие данных и построение механической характеристики в режиме динамического торможения асинхронного электродвигателя с фазным ротором.
1. Теоретическая часть. Электромагнитный момент асинхронного двигателя:
где
 и и  - приведенные значения активного и индуктивного сопротивлений обмотки ротора (Ом) - приведенные значения активного и индуктивного сопротивлений обмотки ротора (Ом)
где
В выражении электромагнитного момента (1) единственной переменной величиной, влияющей на электромагнитный момент М, является скольжение S. Поэтому, задавшись рядом значений скольжения и рассчитав для каждого из них величину момента, а затем, пересчитав эти значения скольжения на частоту вращения ротора

Анализируя полученную характеристику, видим, что для асинхронного двигателя возможно три режима работы: 1. Двигательный (основной) режим – при частоте вращения ротора 2. Режим рекуперативного торможения (генераторный режим) – при частоте вращения ротора 3. Режим торможения противовключением – при частоте вращения ротора На механической характеристике отмечены следующие характерные точки:
Критическая частота вращения определяется путем расчета критического скольжения
с последующим пересчетом на частоту вращения
Максимальное значение момента асинхронного двигателя (Н·м)
В приведенных выражениях знак плюс соответствует двигательному режиму работы, а знак минус – генераторному режиму работы асинхронного двигателя. При практических расчетах удобно пользоваться упрощенным выражением электромагнитного момента асинхронного двигателя:
При расчетах значений момента М, соответствующих рабочему участку механической характеристики Для расчета критического скольжения удобно воспользоваться выражением
которое позволяет рассчитать Здесь
Свойства асинхронных двигателей определяются их механическими характеристиками
При введении в цепь ротора электродвигателя добавочного резистора
находят значения скольжений, соответствующие работе электродвигателя при включенном в цепь ротора добавочном резисторе сопротивлением При построении механических характеристик по данным, полученным после расчетов по приведенным выше формулам, необходимо предварительно пересчитать значения скольжения на частоту вращения (об/мин). При построении механических характеристик по опытным данным такого пересчета не требуется, так как частота вращения ротора измеряется непосредственно. Асинхронный двигатель, кроме двигательного (основного), имеет еще три тормозных режима: I. Генераторный тормозной (рекуперативный) с отдачей энергии в сеть. II. Торможения противовключением. III. Динамического томожения.
Динамическое торможение асинхронного двигателя осуществляется следующим образом: обмотку статора отключают от трехфазной сети и быстро подключают два провода к источнику постоянного тока. Постоянный ток, проходя по обмотке статора. Образует магнитное поле, неподвижное относительно сердечника статора. Но так как ротор двигателя продолжает вращение по инерции, то это магнитное поле индуцирует в обмотке ротора переменный ток. Взаимодействие тока ротора с магнитным полем статора создает тормозной момент, величина которого определяется значениями МДС обмотки статора, активного сопротивления обмотки ротора и частоты вращения ротора. Торможение длится до полной остановки ротора. Для более эффективного торможения в цепь ротора вводят активное сопротивление. Механические характеристики асинхронного двигателя в режиме динамического торможения располагаются во втором квадранте осей координат:
2. Вопросы к обсуждению: Три режима работы асинхронного двигателя: I. Двигательный (основной) режим – при частоте вращения ротора II. Режим рекуперативного торможения (генераторный режим) – при частоте вращения ротора III. Режим торможения противовключением – при частоте вращения ротора
а) Лабораторная установка для опытного получения данных механических характеристик асинхронного двигателя с фазным ротором:
Порядок выполнения работы 1. Ознакомившись с лабораторной установкой, следует записать данные электрических машин. Электродвигатель М Номинальная мощность Номинальное напряжение Номинальная частота вращения Номинальный ток статора Максимальный момент Перегрузочная способность Активное сопротивление обмотки ротора Добавочное сопротивление в цепи ротора
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 1020; Нарушение авторского права страницы
 …………………………………………………. кВт
…………………………………………………. кВт ……………………………………………..........В
……………………………………………..........В ……………………………………...об/мин
……………………………………...об/мин …………………………………………………….А
…………………………………………………….А …………………………………………….А
…………………………………………….А ………………………………………………….А
………………………………………………….А . При этом через одинаковые интервалы частоты вращения снимают показания прибороа и заносят их таблицу 1:
. При этом через одинаковые интервалы частоты вращения снимают показания прибороа и заносят их таблицу 1:  А
А
 В
В
 Н·м
Н·м
 , где
, где  – момент нагрузочной машины НМ1, а
– момент нагрузочной машины НМ1, а  – значение момента потерь. При этом режим работы двигателя М считают генераторным.
– значение момента потерь. При этом режим работы двигателя М считают генераторным.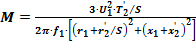 (1)
(1) - напряжение (фазное), подведенное к обмотке статора (В)
- напряжение (фазное), подведенное к обмотке статора (В) - частота в обмотке статора (Гц)
- частота в обмотке статора (Гц) и
и  – активное и индуктивное сопротивление обмотки статора (Ом)
– активное и индуктивное сопротивление обмотки статора (Ом) – синхронная частота вращения (об/мин)
– синхронная частота вращения (об/мин) – частота вращения ротора (об/мин)
– частота вращения ротора (об/мин)
 ;
;  .
. - пусковой момент асинхронного двигателя;
- пусковой момент асинхронного двигателя;  – максимальный момент двигательного режима;
– максимальный момент двигательного режима;  – критическая частота вращения двигательного режима, т. е. частота вращения, соответствующая максимальному моменту
– критическая частота вращения двигательного режима, т. е. частота вращения, соответствующая максимальному моменту  – максимальный момент генераторного режима (режима рекуперативного торможения);
– максимальный момент генераторного режима (режима рекуперативного торможения);  – критическая частота вращения генераторного режима, соответствующая максимальному моменту
– критическая частота вращения генераторного режима, соответствующая максимальному моменту  – пограничная частота вращения, соответствующая переходу двигательного режима асинхронной машины в генераторный. Представляет собой частоту вращения идеального холостого хода двигателя.
– пограничная частота вращения, соответствующая переходу двигательного режима асинхронной машины в генераторный. Представляет собой частоту вращения идеального холостого хода двигателя.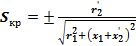 (2)
(2)  . (3)
. (3)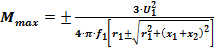 (4)
(4)  (5)
(5) , по (5) возможная ошибка не превышает допустимого значения.
, по (5) возможная ошибка не превышает допустимого значения.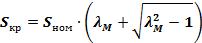 , (6)
, (6) по данным каталога.
по данным каталога. – перегрузочная способность электродвигателя.
– перегрузочная способность электродвигателя. , которые могут быть естественными
, которые могут быть естественными  и искусственными
и искусственными  .
.  работа двигателя происходит в соответствии с искусственной характеристикой. Построение такой характеристики ведется на основании естественной характеристики: задавшись рядом значений момента, определяют соответствующие каждому из них значения скольжения по естественной характеристике, а затем по выражению
работа двигателя происходит в соответствии с искусственной характеристикой. Построение такой характеристики ведется на основании естественной характеристики: задавшись рядом значений момента, определяют соответствующие каждому из них значения скольжения по естественной характеристике, а затем по выражению (7)
(7) . В выражении (7)
. В выражении (7)  .
. ……………………………………………........В
……………………………………………........В …………………………………….об/мин
…………………………………….об/мин ………………………………………………….А
………………………………………………….А ………………………………………………….Н·м
………………………………………………….Н·м
 …………………………………Ом
…………………………………Ом