
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Конструкция и принцип действия.Стр 1 из 16Следующая ⇒
Конструкция и принцип действия. Ответ: Трансформатор –статический электромагнитный аппарат для преобразования переменного тока одного напряжения в переменный ток другого напряжения, той же частоты. Трансформаторы применяют в электрических цепях при передаче и распределении электрической энергии, а также в сварочных, нагревательных, выпрямительных электроустановках и многом другом. Трансформаторы различают по числу фаз, числу обмоток, способу охлаждения. В основном используются силовые трансформаторы, предназначенные для повышения или понижения напряжения в электрических цепях. Устройство и принцип работы: Схема однофазного двухобмоточного трансформатора представлена ниже. Построение векторной диаграммы удобнее начинать с вектора основного потока Ф. Отложим его по оси абсцисс. Вектор I10 опережает его на угол a. Далее строим векторы ЭДС Е1 и Е2‘, которые отстают от потока Ф на 90°. Для определения угла сдвига фаз между E2‘ и I2‘ следует знать характер нагрузки. Предположим, она активно-индуктивная. Тогда I2‘ отстает от E2′ на угол f2. Получилась так называемая заготовка векторной диаграммы трансформатора (рисунок). Для того чтобы достроить ее, необходимо воспользоваться тремя основными уравнениями приведенного трансформатора. Векторная диаграмма трансформатора
Холостой ход однофазного трансформатора. Ответ: В режиме холостого хода первичная обмотка трансформатора включена в сеть на напряжение
Работа под нагрузкой. Ответ: Нагрузочным или рабочим называется режим работы трансформатора, при котором к первичной обмотке подведено напряжение U1, а к вторичной подключены потребители ZН (рис. 1), так что I2 > 0. Векторные диаграммы при нагрузке строят по уравнениям (16). Вид векторной диаграммы зависит от характера нагрузки (рис. 14).
Векторная диаграмма а рис. 14 соответствует активно-индуктивной нагрузке, а векторная диаграмма б - активно-емкостной нагрузке.
Для оценки диапазона изменения напряжения Рис. 6.3. Внешняя характеристика трансформатора Вторичное напряжение U2 при нагрузке отличается от напряжения холостого хода на величину изменения напряжения, которое зависит от величины нагрузки. Внешняя характеристика может быть построена как по расчетным данным активного и индуктивного падений напряжения (расчетная внешняя характеристика), так и по опытным данным (внешняя характеристика конкретного трансформатора). Построение внешней характеристики показано на рис. 6.3. По оси ординат откладывается вторичное напряжение U2, а по оси абсцисс — величина нагрузки α (в % или долях от номинальной мощности). Начальная точка внешней характеристики начинается от ординаты, равной U2НОМ, а другой ее конец, против абсциссы α = 1(т. е. при номинальной нагрузке), будет опущен против начала на величину Δ U — изменения напряжения. Так как изменение напряжения пропорционально нагрузочному току I2 (см. § 6.1), то внешняя характеристика практически представляет прямую линию. На рис. 6.3 построены две внешние характеристики — для cos φ 2=1и cos φ 2= 0, 8. Положения характеристик зависят от мощности и характера нагрузки трансформатора и при малой мощности они могут поменяться местами (при активной и активно-индуктивной нагрузках). Вторичное напряжение: Большое значение имеет напряжение на вторичных выводах трансформатора, так как к этой обмотке подсоединяются приборы, устройства, машины. Например, если напряжение на осветительных лампах мало, то они горят тускло; если напряжение питания асинхронных двигателей меньше номинального на 10 %, то вращающий момент двигателя уменьшается на 19 % и такой момент может быть недостаточным для рабочей машины, приводимой в действие электродвигателем; пониженное напряжение какого-либо автоматического выключателя может отрицательно сказаться на его нормальной работе. Поэтому важно уметь найти напряжение питания устройств, подключаемых к вторичной обмотке трансформатора. Изменение вторичного напряжения: Изменение вторичного напряжения определяют в процентах Формулу для определения
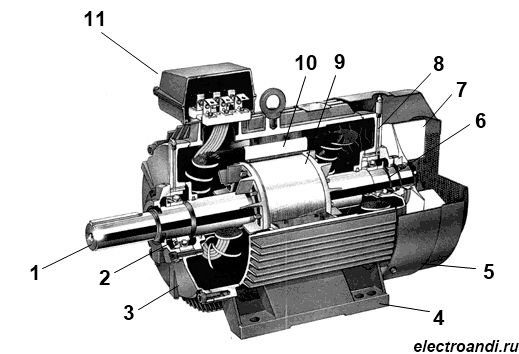
Устройство:
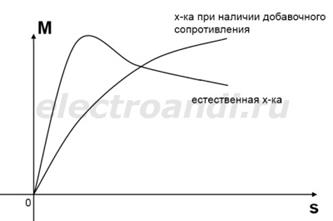
На рисунке: 1 - вал, 2, 6 - подшипники, 3, 8 - подшипниковые щиты, 4 - лапы, 5 - кожух вентилятора, 7 - крыльчатка вентилятора, 9 - короткозамкнутый ротор, 10 - статор, 11 - коробка выводов. Основными частями асинхронного двигателя являются статор (10) и ротор (9). Статор имеет цилиндрическую форму, и собирается из листов стали. В пазах сердечника статора уложены обмотки статора, которые выполнены из обмоточного провода. Оси обмоток сдвинуты в пространстве относительно друг друга на угол 120°. В зависимости от подаваемого напряжения концы обмоток соединяются треугольником или звездой. Роторы асинхронного двигателя бывают двух видов: короткозамкнутый и фазный ротор. Электромагнитный момент АД. Ответ: Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности: М = Рэм /ω 1 (13.11) где ω 1 = 2 π n1 /60 = 2π f1 (13.12) - угловая синхронная скорость вращения. Подставив в (13.11) значение электромагнитной мощности по (13.5), получим М = Рэ2/ (ω 1 s) = m1 I ′ 22 r′ 2 /(ω 1 s) (13.13) т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора. Если значение тока ротора по выражению (12.25) подставить в (13.13), то получим формулу электромагнитного момента асинхронной машины (Н М = Рабочие характеристики АД. Ответ: Рабочие характеристики асинхронного двигателя представляют собой графически выраженные зависимости частоты вращения n2, КПД η, полезного момента (момента на валу) М2, коэффициента мощности cos φ, и тока статора I1 от полезной мощности Р2 при U1 = const f1 = const. Скоростная характеристика n2 = f(P2). Частота вращения ротора асинхронного двигателя n2 = n1(1 - s). Скольжение s = Pэ2/Pэм, т. е. скольжение асинхронного двигателя, а следовательно, и его частота вращения определяются отношением электрических потерь в роторе к электромагнитной мощности. Пренебрегая электрическими потерями в роторе в режиме холостого хода, можно принять Рэ2 = 0, а поэтому s ≈ 0 и n20 ≈ n1. По мере увеличения нагрузки на валу асинхронного двигателя отношение s = Pэ2/Pэм растет, достигая значений 0, 01 - 0, 08 при номинальной нагрузке. В соответствии с этим зависимость n2 = f(P2) представляет собой кривую, слабо наклоненную к оси абсцисс. Однако при увеличении активного сопротивления ротора двигателя r2' угол наклона этой кривой увеличивается. В этом случае изменения частоты асинхронного двигателя n2 при колебаниях нагрузки Р2 возрастают. Объясняется это тем, что с увеличением r2' возрастают электрические потери в роторе.
Рис. 1. Рабочие характеристики асинхронного двигателя двигателя Зависимость М2 =f(P2). Зависимость полезного момента на валу асинхронного двигателя М2 от полезной мощности Р2 определяется выражением M2 = Р2/ ω 2 = 60 P2/ (2π n2) = 9, 55Р2/ n2, где Р2 — полезная мощность, Вт; ω 2 = 2π f 2/ 60 — угловая частота вращения ротора. Из этого выражения следует, что если n2 = const, то график М2 =f2(Р2) представляет собой прямую линию. Но в асинхронном двигателе с увеличением нагрузки Р2 частота вращения ротора уменьшается, а поэтому полезный момент на валу М2 с увеличением нагрузки возрастает не сколько быстрее нагрузки, а следовательно, график М2 =f (P2) имеет криволинейный вид.
Рис. 2. Векторная диаграмма асинхронного двигателя при небольшой нагрузке Регулирование скорости АД. Ответ: Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей. Частота вращения ротора равна Регулирование скорости с помощью изменения активного сопротивления в цепи ротора: Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики. Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения. Регулирование скорости двигателя с помощью изменения напряжения питания: Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз.
Регулирование скорости с помощью изменения частоты питания: Однофазный АД. Ответ: Асинхронные двигатели небольшой мощности (15 — 600 Вт) применяют в автоматических устройствах и электробытовых приборах для привода вентиляторов, насосов и другого оборудования, не требующего регулирования частоты вращения. В электробытовых приборах и автоматических устройствах обычно используют однофазные микродвигатели, так как эти приборы и устройства, как правило, получают питание от однофазной сети переменного тока. Принцип действия и устройство однофазного двигателя. Обмотка статора однофазного двигателя (рис. 4.60, а) расположена в пазах, занимающих примерно две трети окружности статора, которая соответствует паре полюсов. В результате распределение МДС и индукции в воздушном зазоре близко к синусоидальному. Поскольку по обмотке проходит переменный ток, МДС пульсирует во времени с частотой сети. Индукция в произвольной точке воздушного зазора (4.99) Вх = Вm sin ω t cos (π х/τ ). Таким образом, в однофазном двигателе обмотка статора создает неподвижный поток, изменяющийся во времени, а не круговой вращающийся поток, как в трехфазных двигателях при симметричном питании. Поле, направление вращения которого совпадает с направлением вращения ротора, называют прямым; поле обратного направления — обратным или инверсным.
Синхронные электромашины: Ответ:
Ответ:
U-образные характеристики. Ответ: Рассмотрим работу синхронного генератора, если после подключения его к сети для параллельной работы изменить ток в его обмотке возбуждения, оставив неизменным вращающий момент приводного двигателя? Предположим, что генератор после подключения на сеть работает без нагрузки и его ЭДС Если же после того, как генератор подключен к сети, уменьшить ток возбуждения, т. е. недовозбудить машину, то ЭДС
Рис. 97. Векторные диаграммы ЭДС синхронного генератора, включенного на параллельную работу. Показанное на векторных диаграммах можно объяснить следующим. При перевозбуждении генератора увеличивается МДС возбуждения
Рис 98. U – образные характеристики синхронного генератора. Если при всех изменениях тока возбуждения вращающий момент приводного двигателя остается неизменным, то также неизменной остается активная мощность генератора: Коммутация. Ответ: Коммутацией в электрических машинах называется процесс переключения секций обмотки из одной параллельной ветви в другую и связанные с этим явления. На рис. 1.13, а показана секция перед коммутацией на рис. 1.13, б – секция в процессе коммутации (замкнутая накоротко через щетки 1, 2), на рис. 1.13, в – секция после коммутации. Процесс переключения секции протекает достаточно быстро: время коммутации одной секции, называемое периодом коммутации Тк, составляет примерно 0, 001 – 0, 0003 с. Явления, происходящие при коммутации, существенно влияют на надежность и долговечность работы машины постоянного тока. При плохой коммутации появляется значительное искрение под щетками и связанное с ним обгорание коллектора.
Ток i в короткозамкнутой секции 2 за время Тк меняет свое направление на противоположное: Пути улучшения коммутации: В предыдущем параграфе были рассмотрены электромагнитные причины плохой коммутации. Однако к искрению под щетками могут приводить и механические причины: неравномерный износ коллектора и его вибрация, чрезмерный износ щеток, выступание отдельных коллекторных пластин и изоляции и т.д. С учетом этого улучшение коммутации возможно несколькими путями: Ø обеспечением в машине прямолинейной или несколько ускоренной коммутации; это достигается созданием в зоне коммутации секции дополнительного магнитного поля такой величины и направления, чтобы еL +
Конструкция и принцип действия. Ответ: Трансформатор –статический электромагнитный аппарат для преобразования переменного тока одного напряжения в переменный ток другого напряжения, той же частоты. Трансформаторы применяют в электрических цепях при передаче и распределении электрической энергии, а также в сварочных, нагревательных, выпрямительных электроустановках и многом другом. Трансформаторы различают по числу фаз, числу обмоток, способу охлаждения. В основном используются силовые трансформаторы, предназначенные для повышения или понижения напряжения в электрических цепях. Устройство и принцип работы: Схема однофазного двухобмоточного трансформатора представлена ниже. Построение векторной диаграммы удобнее начинать с вектора основного потока Ф. Отложим его по оси абсцисс. Вектор I10 опережает его на угол a. Далее строим векторы ЭДС Е1 и Е2‘, которые отстают от потока Ф на 90°. Для определения угла сдвига фаз между E2‘ и I2‘ следует знать характер нагрузки. Предположим, она активно-индуктивная. Тогда I2‘ отстает от E2′ на угол f2. Получилась так называемая заготовка векторной диаграммы трансформатора (рисунок). Для того чтобы достроить ее, необходимо воспользоваться тремя основными уравнениями приведенного трансформатора. Векторная диаграмма трансформатора
Популярное:
|
Последнее изменение этой страницы: 2016-05-03; Просмотров: 756; Нарушение авторского права страницы
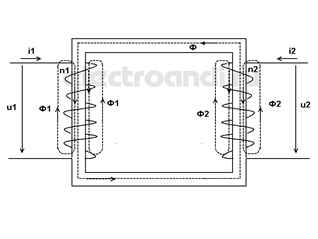 На схеме изображены основные части: ферромагнитный сердечник, две обмотки на сердечнике. Первая обмотка и все величины которые к ней относятся (i1-ток, u1-напряжение, n1-число витков, Ф1 – магнитный поток) называют первичными, вторую обмотку и соответствующие величины - вторичными. Первичную обмотку включают в сеть с переменным напряжением, её намагничивающая сила i1n1 создает в магнитопроводе переменный магнитный поток Ф, который сцеплен с обеими обмотками и в них индуцирует ЭДС e1= -n1dФ/dt, e2= -n2dФ/dt. При синусоидальном изменении магнитного потока Ф = Фm sinω t, ЭДС равно e = Em sin (ω t-π /2). Для того чтобы посчитать действующее значение ЭДС нужно воспользоваться формулой E=4.44 f n Фm, где f- циклическая частота, n – количество витков, Фm – амплитуда магнитного потока. Причем если вы хотите посчитать величину ЭДС в какой либо из обмоток, нужно вместо n подставить число витков в данной обмотке. Из приведенных выше формул можно сделать вывод о том, что ЭДС отстает от магнитного потока на четверть периода и отношение ЭДС в обмотках трансформатора равно отношению чисел витков E1/E2=n1/n2. Если вторая обмотка не находится под нагрузкой, значит трансформатор находится в режиме холостого хода. В этом случае i2 = 0, а u2=E2, ток i1 мал и мало падение напряжения в первичной обмотке, поэтому u1≈ E1 и отношение ЭДС можно заменить отношением напряжений u1/u2 = n1/n2 = E1/E2 = k. Из этого можно сделать вывод, что вторичное напряжение может быть меньше или больше первичного, в зависимости от отношения чисел витков обмоток. Отношение первичного напряжения ко вторичному при холостом ходе трансформатора называется коэффициентом трансформации k. КПД находиться как отношение активной мощности на выходе к активной мощности на входе η = P2/P1.
На схеме изображены основные части: ферромагнитный сердечник, две обмотки на сердечнике. Первая обмотка и все величины которые к ней относятся (i1-ток, u1-напряжение, n1-число витков, Ф1 – магнитный поток) называют первичными, вторую обмотку и соответствующие величины - вторичными. Первичную обмотку включают в сеть с переменным напряжением, её намагничивающая сила i1n1 создает в магнитопроводе переменный магнитный поток Ф, который сцеплен с обеими обмотками и в них индуцирует ЭДС e1= -n1dФ/dt, e2= -n2dФ/dt. При синусоидальном изменении магнитного потока Ф = Фm sinω t, ЭДС равно e = Em sin (ω t-π /2). Для того чтобы посчитать действующее значение ЭДС нужно воспользоваться формулой E=4.44 f n Фm, где f- циклическая частота, n – количество витков, Фm – амплитуда магнитного потока. Причем если вы хотите посчитать величину ЭДС в какой либо из обмоток, нужно вместо n подставить число витков в данной обмотке. Из приведенных выше формул можно сделать вывод о том, что ЭДС отстает от магнитного потока на четверть периода и отношение ЭДС в обмотках трансформатора равно отношению чисел витков E1/E2=n1/n2. Если вторая обмотка не находится под нагрузкой, значит трансформатор находится в режиме холостого хода. В этом случае i2 = 0, а u2=E2, ток i1 мал и мало падение напряжения в первичной обмотке, поэтому u1≈ E1 и отношение ЭДС можно заменить отношением напряжений u1/u2 = n1/n2 = E1/E2 = k. Из этого можно сделать вывод, что вторичное напряжение может быть меньше или больше первичного, в зависимости от отношения чисел витков обмоток. Отношение первичного напряжения ко вторичному при холостом ходе трансформатора называется коэффициентом трансформации k. КПД находиться как отношение активной мощности на выходе к активной мощности на входе η = P2/P1.
 , а вторичная разомкнута
, а вторичная разомкнута  . Для этого режима справедливы уравнения
. Для этого режима справедливы уравнения
 (17)
(17) . ЭДС
. ЭДС  и
и  отстают от потока на угол 90°. Реактивная составляющая тока намагничивания
отстают от потока на угол 90°. Реактивная составляющая тока намагничивания  совпадает по фазе с потоком, а его активная составляющая опережает поток на 90°. Намагничивающий ток
совпадает по фазе с потоком, а его активная составляющая опережает поток на 90°. Намагничивающий ток  несколько опережает поток
несколько опережает поток  и прибавить к нему падения напряжений на активном
и прибавить к нему падения напряжений на активном  и индуктивном
и индуктивном  сопротивлениях. Из векторной диаграммы видно, что
сопротивлениях. Из векторной диаграммы видно, что  очень мал. Обычно
очень мал. Обычно  . Трансформатор потребляет из сети реактивную мощность на создание магнитного поля в трансформаторе.
. Трансформатор потребляет из сети реактивную мощность на создание магнитного поля в трансформаторе.
 и
и  увеличение активно-индуктивной нагрузки вызывает снижение напряжения
увеличение активно-индуктивной нагрузки вызывает снижение напряжения  , а при увеличении активно-емкостной нагрузки напряжение
, а при увеличении активно-емкостной нагрузки напряжение  имеет составляющую, направленную навстречу току
имеет составляющую, направленную навстречу току  ), а при активно-емкостной нагрузке трансформатор дополнительно намагничивается (поток Ф возрастает, так как ток
), а при активно-емкостной нагрузке трансформатор дополнительно намагничивается (поток Ф возрастает, так как ток 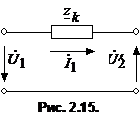
 вводится величина
вводится величина  , представляющая собой арифметическую разность между вторичным напряжением трансформатора при холостом ходе (
, представляющая собой арифметическую разность между вторичным напряжением трансформатора при холостом ходе (  ) и при номинальной нагрузке (
) и при номинальной нагрузке (  ). Напряжение первичной обмотки принимается постоянным и равным номинальному
). Напряжение первичной обмотки принимается постоянным и равным номинальному  .
. . (18)
. (18) примем допущение
примем допущение  , тогда, используя
, тогда, используя 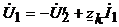 . (19)
. (19) . (2.18)
. (2.18) можно получить из векторной диаграммы
можно получить из векторной диаграммы
 м):
м):  (13.14)
(13.14)

 . При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов
. При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов  . Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки.
. Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов. Рассмотрим основные способы регулировки. 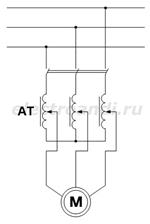
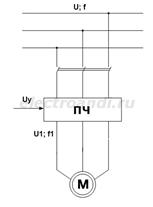 При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя. При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю. Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1. Регулирование скорости АД изменением числа пар полюсов: Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора. В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1, 2, 3, 4, 5. Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2: 1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя. При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю. Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1необходимо производить пропорционально квадратному корню изменения частоты f1. Регулирование скорости АД изменением числа пар полюсов: Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора. В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1, 2, 3, 4, 5. Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда - звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2: 1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя. 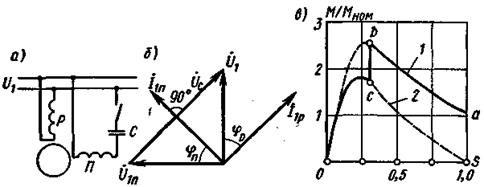







 уравновешивает напряжение сети
уравновешивает напряжение сети  . Если при этом увеличить ток в обмотке возбуждения, т. е. перевозбудить машину, то ЭДС
. Если при этом увеличить ток в обмотке возбуждения, т. е. перевозбудить машину, то ЭДС  в цепи генератора появится избыточная ЭДС
в цепи генератора появится избыточная ЭДС  (рис. 97, а), вектор которой совпадает по направлению с вектором ЭДС
(рис. 97, а), вектор которой совпадает по направлению с вектором ЭДС  . Ток
. Ток  , вызванный ЭДС
, вызванный ЭДС  , будет отставать от нее по фазе на 90° (поскольку
, будет отставать от нее по фазе на 90° (поскольку  ). По отношению к ЭДС
). По отношению к ЭДС  и в цепи генератора опять будет действовать избыточная ЭДС
и в цепи генератора опять будет действовать избыточная ЭДС  . Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети
. Теперь вектор этой ЭДС будет совпадать по направлению с вектором напряжения сети 
 . Это сопровождается появлением в обмотке статора реактивного тока
. Это сопровождается появлением в обмотке статора реактивного тока  , который по отношению к ЭДС является отстающим (индуктивным). Вызванная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток
, который по отношению к ЭДС является отстающим (индуктивным). Вызванная этим током продольно-размагничивающая реакция якоря компенсирует избыточную МДС возбуждения так, что ЭДС генератора остается неизменной. Такой же процесс происходит и при недовозбуждении генератора с той лишь разницей, что в обмотке появляется опережающий (емкостный) ток 
 . Из этого выражения следует, что при
. Из этого выражения следует, что при  активная составляющая тока статора
активная составляющая тока статора  . Таким образом, степень возбуждения синхронного генератора влияет только на реактивную составляющую тока статора. Что же касается активной составляющей тока
. Таким образом, степень возбуждения синхронного генератора влияет только на реактивную составляющую тока статора. Что же касается активной составляющей тока  , то она остается неизменной. Зависимость тока статора
, то она остается неизменной. Зависимость тока статора  от тока в обмотке возбуждения
от тока в обмотке возбуждения  при неизменной активной нагрузке генератора выражается графически U – образной кривой. На рис. 98 представлены U – образные характеристики
при неизменной активной нагрузке генератора выражается графически U – образной кривой. На рис. 98 представлены U – образные характеристики  при
при  , построенные для разных значений активной нагрузки:
, построенные для разных значений активной нагрузки:  ;
;  и
и  . U – образные характеристики синхронного генератора показывают, что любой нагрузке генератора соответствует такое значение тока возбуждения
. U – образные характеристики синхронного генератора показывают, что любой нагрузке генератора соответствует такое значение тока возбуждения  , при котором ток статора
, при котором ток статора  . В этом случае генератор работает при коэффициенте мощности
. В этом случае генератор работает при коэффициенте мощности  . Значения тока возбуждения, соответствующие
. Значения тока возбуждения, соответствующие  , опережает по фазе напряжение сети
, опережает по фазе напряжение сети  , неизменным при изменениях активной нагрузки генератора требуется одновременное изменение тока возбуждения генератора.
, неизменным при изменениях активной нагрузки генератора требуется одновременное изменение тока возбуждения генератора. Рис. 1.13
Рис. 1.13 от +Iадо – Iа(рис. 1.14), где Iа – ток в параллельной ветви. Вследствие изменения тока в секции наводится ЭДС самоиндукции
от +Iадо – Iа(рис. 1.14), где Iа – ток в параллельной ветви. Вследствие изменения тока в секции наводится ЭДС самоиндукции  . роме этого, коммутируемая секция, если щетки расположены на геометрической нейтрали, пересекает поперечное поле якоря и поэтому в ней наводится ЭДС
. роме этого, коммутируемая секция, если щетки расположены на геометрической нейтрали, пересекает поперечное поле якоря и поэтому в ней наводится ЭДС  , называемая ЭДС вращения, где BП – индукция поперечного поля. Обе ЭДС вызывают ток коммутации iК , который замыкается по цепи: секция, коллекторная пластина, щетка, коллекторная пластина, секция (штриховая линия на рис. 1.13, б). От сопротивления этой цепи, а также от значений и направления еL и
, называемая ЭДС вращения, где BП – индукция поперечного поля. Обе ЭДС вызывают ток коммутации iК , который замыкается по цепи: секция, коллекторная пластина, щетка, коллекторная пластина, секция (штриховая линия на рис. 1.13, б). От сопротивления этой цепи, а также от значений и направления еL и  зависит значение и направление тока iК . Кроме того, по коммутируемой секции протекает часть тока якоря. Если еL и
зависит значение и направление тока iК . Кроме того, по коммутируемой секции протекает часть тока якоря. Если еL и