|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Измерение угла поворота вала
Наиболее распространенным является измерение угла поворота коленчатого вала в процессе работы микропроцессорной системы управления двигателя. При этом используют индуктивные датчики, структурная схема и внешний вид которого представлены на рис. 28.
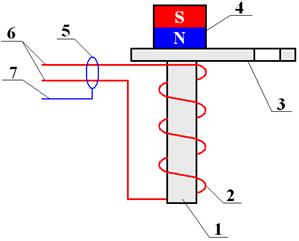
Рис. 28. Индуктивный датчик: а) структурная схема; б) внешний вид; 1 – металлический стержень; 2 – провод, намотанный в виде катушки; 3 – металлический кронштейн крепления датчика; 4 – магнит; 5 – металлическая экранирующая оплетка проводов; 6 – выводы для подключения катушки датчика; 7 – вывод, для подключения экранирующей оплетки Индуктивный датчик состоит из катушки провода 2, намотанного на металлический стержень 1. В верхней части датчика закреплен магнит 4. Катушка 2 имеет два вывода 6, которые помещены в экранирующую оплетку 5. Для подключения датчика используют два вывода 6 катушки 2 и провод от экранирующей оплетки 7. Индуктивный датчик (ИД) устанавливают в кожухе сцепления двигателя так, чтобы нижний конец его металлического стержня 2 находился на расстоянии 0, 5¸ 1, 0 мм от поверхности зубьев венца 1 маховика двигателя (рис. 29, а). Магнит создает магнитное поле вокруг катушки датчика. При вращении маховика, зубья его венца движутся относительно стержня индуктивного датчика. При прохождении вершины зуба мимо стержня магнитное поле вокруг датчика увеличивается, поскольку зазор между ними минимален. При прохождении впадины зуба, зазор между стержнем датчика и маховиком сильно увеличивается и магнитное поле датчика резко снижается. Таким образом, на катушку индуктивного датчика действует переменное магнитное поле и в ней возникает переменный ток, с напряжением ±Uд которое можно снять с контактов датчика. Форма сигнала индуктивного датчика представлена на верхнем графике рисунка 29, б. Максимальная амплитуда его сигнала Uд мах зависит от скорости прохождения зубьев относительно стержня датчика и может достигать от долей до нескольких десятков вольт.
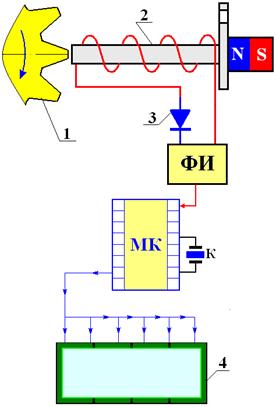
Рис. 29. Измерение угла поворота коленчатого вала а) блок-схема микропроцессорного измерителя; б) - осциллограммы сигналов; 1 – зубчатый венец маховика; 2 – индуктивный датчик; 3 – полупроводниковый диод; 4 – жидкокристаллический дисплей
Для измерения угла поворота коленчатого вала, сигнал ±Uд индуктивного датчика фильтруют, пропуская его через полупроводниковый диод 3 (рис. 29, а). Поскольку диод 3 попускает ток только в одну сторону и не пропускает его в другую, то на его выходе останутся только положительные полупериоды сигнала датчика с напряжением +Uд (их форма представлена на среднем графике рис. 29, б). Положительные полупериоды сигнала индуктивного датчика напряжением +Uд поступают на вход формирователя ФИ стандартных (по форме и длительности) прямоугольных импульсов. В моменты времени t1, t2, и т.д., когда зубья маховика начинают проходить мимо стержня индуктивного датчика, формирователь импульсов ФИ будет вырабатывать на своем выходе по одному стандартному прямоугольному импульсу, напряжением +5В (см. нижний график рис. 29, б). Чтобы, используя стандартные импульсы, определить величину угла поворота коленчатого вала необходимо знать количество зубьев Z на венце его маховика. Величина угла jv поворота коленчатого вала будет равна:
где nz – количество стандартных импульсов, на выходе формирователя ФИ за период поворота коленчатого вала на угол jv. Для решения этого уравнения используют микропроцессор МК. Стандартные импульсы формирователя ФИ поступают на вход микропроцессора МК. Программа микропроцессора считывает с его входа стандартные импульсы (считает nz) и, решая уравнение (2.21), определяет величину угла поворота коленчатого вала jv. Измерение скорости вращения коленчатого вала. Используя схему, представленную на рис. 2.21, а) можно измерять скорость n e вращения коленчатого вала двигателя. Для этого в схеме с микропроцессором установлен кварцевый генератор, генерирующий стандартные импульсы времени, длительностью t t =1, 0 секунду. Чтобы определить скорость n e вращения коленчатого вала двигателя микропроцессор решает уравнение вида:
где n t – количество стандартных импульсов, поступивших в микропроцессор МК от формирователя ФИ за время t t = 1, 0 с. При необходимости, скорость n e вращения коленчатого вала двигателя можно отображать на жидкокристаллическом дисплее 4 (рис. 2.21, а). Абсолютная погрешность системы измерения угла jv поворота определяется по формуле:
Относительная погрешность системы измерения скорости n e вращения определяется по формуле:
ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ Измерение температуры выполняют несколькими средствами, наиболее распространенными из которых являются термопреобразователи сопротивления и термоэлектрические преобразователи. Их выпускают в разных исполнениях в зависимости от способа контакта с окружающей средой (погружаемые, поверхностные), условий эксплуатации (стационарные, переносные), защищенности от воздействия окружающей среды (обыкновенные, пылезащищенные, водозащищенные, взрывозащищенные), герметичности, инерционности, устойчивости к механическим воздействиям (обыкновенные, виброустойчивые). Они различаются по количеству чувствительных элементов для измерения температуры в одной зоне (одинарные, двойные), числу зон (одно- и многозонные) и выводных проводников (два, три, четыре). ТЕРМОПРЕОБРАЗОВАТЕЛИ СОПРОТИВЛЕНИЯ Принцип действия термопреобразователей сопротивления основан на использовании свойства чувствительного элемента менять свое сопротивление при изменении температуры. Они могут быть проволочными и полупроводниковыми. Термопреобразователи сопротивления ПРОВОЛОЧНЫЕ. Материалом проволочных термопреобразователей является, как правило, медь или платина (см. табл.). В диапазоне температур от - 50 до +180 °С сопротивление меди находится в линейной зависимости от температуры: Rt = Ro [1 + α (t – to)], где Rt - сопротивление при температуре t, α = 0, 00428 1/°С. Сопротивление платины: Rt = Ro [1 + α п (t – to) + β п (t – to)2], где α п = 3, 94∙ 10-3 1/°С; β п = 5, 8∙ 10-7 1/°С. Конструкции термопреобразователей сопротивления весьма разнообразны. Чувствительный элемент большинства из них представляет собой спираль, намотанную без механических натяжений на каркас из изоляционного материала. Каркас со спиралью помещен в защитный кожух, представляющий собой металлическую или стеклянную гильзу, заполняемую гелием или порошком окиси алюминия. По точности измерения температуры термопреобразователи сопротивления делят на пять классов (см. таблицу). Основные параметры термопреобразователей сопротивления
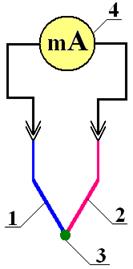
Наибольшее применение в научных исследованиях получили серийные преобразователи ТСП-5071 с температурным диапазоном от -200 до +600 °С. Температурный коэффициент полупроводниковых термопреобразователей ( термисторов ) более высокий (3÷ 6 % на 1 °С), по сравнению с проволочными (0, 4 % на 1 °С). Они отличаются большим внутренним сопротивлением, малыми габаритами, высокой механической прочностью, длительным сроком службы и низкой стоимостью. Для измерения температуры термопреобразователи сопротивлений R1, R2, R3, и R4 включают в мостовую схему с балансировочным резистором и усилителем (см. рис. 29-1).
Рис. 29-1. Мостовая схема включения термопреобразователей сопротивлений с балансировочным резистором и усилителем. Причем, если необходимо измерить разность температур между двумя средами, то термопреобразователи сопротивлений R1 и R2 располагают в одной среде, а термопреобразователи сопротивлений R3 и R4 – в другой. Включение термопреобразователей сопротивлений R1 и R2, а также R3, и R4 в мостовую схему[1] следует выполнять попарно, в диагонали моста. В этом случае при нагревании (или охлаждении) любой пары резисторов разность потенциалов между точками А и С будет изменяться пропорционально изменению температуры. Перед измерением схему сначала прогревают (дав поработать 10÷ 15 минут) а затем балансируют и тарируют. Балансировку схемы выполняют при нахождении всех термопреобразователей сопротивлений R1, R2, R3, и R4, в одинаковой температуре. Её производят резистором R7 до тех пор, пока разность потенциалов между точками А и С не будет равна «нулю». Показание измерительного прибора mA при этом установится на отметке «ноль». Для тарировки схемы термопреобразователи сопротивлений R1 и R2 постепенно нагревают до максимальных рабочих температур, а затем также постепенно охлаждают их, одновременно регистрируя температуру и показания прибора mA. При этом термопреобразователи сопротивлений R3 и R4 должны находиться при постоянной начальной температуре. По результатам тарировки строят тарировочный график функции A=f(ToC), по которому рассчитывают величину абсолютной и приведенной погрешности измерения. Абсолютная погрешность системы измерения температуры определяется как максимальная разность, по формуле:
где Тн – температура, измеренная схемой в режиме её повышения; То – температура, измеренная схемой в режиме её понижения. Относительная погрешность системы измерения температуры определяется по формуле:
Важным параметром преобразователя является показатель тепловой инерции или постоянная времени, определяемая как время, в течение которого тело, помещенное в среду с постоянной температурой, нагревается до 63, 2 % значения температуры среды. По этому параметру термопреобразователи сопротивления выпускают с малой тепловой инерцией (не более 10 с), со средней (не более 60 с) и с большой (более 60 с), что определяется их конструкцией. К недостаткам термисторов относят нелинейность и низкую воспроизводимость градиуровочной характеристики, что приводит к необходимости их индивидуальной градуировки. Допускаемые отклонения параметров термопреобразователей сопротивлений
ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ. Чувствительным элементом (датчиком) термоэлектрическогопреобразователя является термопара.
Низкие температуры (до -200 °О измеряют медь-копелевыми, хромель-копелевыми, хромель-алюмелевыми, железо-константановыми и медь-кон-стантановыми термопреобразователями, из которых последние получили наибольшее применение. Для измерения более низких температур термоэлектрические преобразователи применяют редко вследствие их невысокой чувствительности, а также значительных погрешностей, обусловленных паразитными ЭДС. Преобразователи типа ТВР используют в вакууме или в инертных средах, так как при высоких температурах на воздухе они окисляются. Ниже в таблице приведены основные параметры термоэлектрических преобразователей и формулы для вычисления пределов допускаемых отклонений термо-ЭДС термопар от градуировочных таблиц. Основные параметры термоэлектрических преобразователей
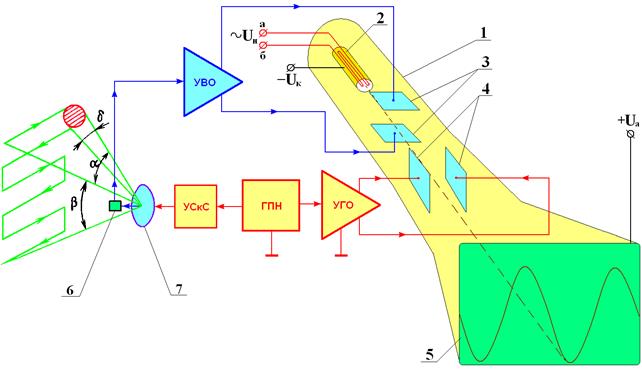
Термоэлектрический преобразователь как элемент системы регулирования в значительной степени определяет характеристики температурного устройства испытательной машины. Тепловая инерция термопреобразователя зависит от его конструктивного исполнения, уровня температуры и диаметра термоэлектродов. Выпускают термопреобразователи малой, средней, большой и, ненормированной инерционности с показателем тепловой инерции соответственно не более 5, 60, 180 и свыше 180 с для погружаемых, и не более 10, 120, 300 и свыше 300 с для поверхностных термопреобразователей. АНАЛИЗ ТЕМПЕРАТУРНЫХ ПОЛЕЙ Пирометрические методы находят все более широкое применение для получения видимого изображения и регистрации температурного поля поверхности материальных объектов. Приборы для наблюдения и исследования объектов по их тепловому излучению называются тепловизорами. Первые приборы, разработанные для ночного видения, основанные на применении электронно-оптических методов усиления и визуализации фотоэлектронов, имели спектральный диапазон чувствительности до 1, 3 мкм и позволяли наблюдать распределение температур только выше 400 °С. Телевизионные приемные трубки - видиконы с фоторезистивным слоем из пленки оксида свинца или сульфида оксида свинца чувствительны к излучению до 2 мкм. Чувствительные телекамеры, снабженные такими видиконами, дают возможность определять температурное поле при температурах выше 250 °С. Создание чувствительных приемников инфракрасного излучения, спектральная чувствительность которых простирается далеко в инфракрасную область спектра, открыло широкие возможности для развития термографии и тепловидения объектов с более низкими температурами. Применение в качестве приемников излучения пироэлектрических элементов дает возможность получать видимое изображение температурного поля объектов с температурой от -20 до +2000 °С. Телевизионные приемники инфракрасного излучения, в которых видикон выполнен со сканируемой поверхностью из пироэлектрического кристалла три-глицилсульфата, позволяют создавать чувствительные пироэлектрические тепловизоры, известные под названием пиротронов, пироконов или видиконов пироэлектрических, которые обеспечивают прием инфракрасного излучения вплоть до 40 мкм. Структурная схема тепловизора показана на рис. 29-2. Приемно-оптическая система 7, управляемая сканирующей системой УСкС, производит обзор объекта и разлагает его изображение в ряд точек, излучение от которых воспринимается приемником излучения 6, выходной сигнал которого подается на усилитель УВО. Сигналы с усилителя УВО и устройств развертки и синхронизации ГПНсоздают на экране электронно-лучевой трубки[2] 5видимое изображение температурного поля поверхности исследуемого объекта. Обзор происходит в пределах поля зрения, определяемого углами α и β, за время t, называемое временем кадра. В качестве приемников излучения применяются фоторезисторы из антимонида индия, охлаждаемые жидким азотом до -196°С. Такие приемники имеют постоянную времени 1 мкс, что позволяет в зависимости от требуемого геометрического разрешения получать кадры с частотой 0, 5÷ 60 Гц. Низкая частота кадров пока ограничивает применение тепловизоров при исследовании динамики тепловых процессов и наблюдении быстродвижущихся объектов.
Рис. 29-2. Структурная схема тепловизора, 1 – электронно-лучевая трубка; 2 – электронная пушка; 3 – вертикально отклоняющие пластины; 4 – горизонтально отклоняющие пластины; 5 - экран электронно-лучевой трубки; 6 - приемник излучения; 7 - приемно-оптическая система; УВО – усилитель вертикального отклонения луча; УГО – усилитель горизонтального отклонения луча; ГПН – генератор пилообразного напряжения; УСкС - управляющая сканирующая система Можно увеличить геометрическое разрешение и частоту кадров применением нескольких приемников, соединенных в строку или детекторную матрицу. Важной характеристикой тепловизоров является их порог чувствительности - минимально определяемая разность температур Δ Тмин на поверхности АЧТ (e=1) с температурой 25°С, при которой отношение сигнала к собственным шумам тепловизора должно быть равно 1. У серийно выпускаемых тепловизоров Δ Тмин = 0, 1÷ 0, 3 °С.
Рис. 29-3. Внешний вид тепловизора – а) и изображение температурных полей двигателя на экране тепловизора – б) Для исследования температурных полей малых объектов разработаны тепловизорные микроскопы и микрорадиометры, применяемые, например, для исследования температурного поля микросхем с целью обнаружения скрытых дефектов. В таких приборах используется микроскопная оптика с увеличением от 3 до 125. Известны микрорадиометры, имеющие пространственное разрешение 10 мкм и температурное разрешение Δ Т=0, 06°С в диапазоне температур от -30 до +850°С. Тепловидение и термография широко применяются при геологических и климатологических исследованиях земной поверхности, в медицинской практике для диагностики, в строительстве для проверки теплоизоляции зданий, для обнаружения мест перегрева в электрических цепях и у различного рода энергетического оборудования, для измерения механических напряжений и деформаций. Для температурного зондирования атмосферы применяются спутниковые радиометры, а для поисков залежей полезных ископаемых - спектрорадиометры. Такие приборы обычно градуируются непосредственно в единицах температуры или в единицах энергетической яркости. Популярное:
|
Последнее изменение этой страницы: 2016-05-29; Просмотров: 1089; Нарушение авторского права страницы


 , [град] (2.21)
, [град] (2.21) , [об/сек] (2.22)
, [об/сек] (2.22) , [град]. (2.23)
, [град]. (2.23) (2.24)
(2.24)
 max, [oC]
max, [oC]