|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Линеаризация навигационных функций
Для устранения недостатков прямых аналитических методов расчета координат применяют процедуру линеаризации навигационных функций в окрестности некоторой точки, которая, как предполагают, должна быть близка к обсервованной. В морской навигации это счислимая точка С(Хс, Ус)- Линеаризацию производят с помощью разложения навигационной функции в ряд Тейлора с сохранением только первых членов разложения. Геометрически - это замена графика функции в счислимой точке {навигационной изолинии), касательной к ней. Эта касательная называется линией положения. Так как в измерениях всегда присутствуют погрешности, тоизмеренный навигационный параметр никогда не совпадет с навигационным параметром в счислимой точке (счислимый навигационный параметр), поэтому линия положения из-за погрешности измерения сместится параллельно самой себе в сторону измеренного навигационного параметра. Таким образом, разность между обсервованным Uo (измеренным) и счислимьш Uc навигационными параметрами может быть элементарно мала и представлена в виде дифференциала навигационной функции U == f(x, y), вычисленного для некоторой малой окрестности счислимой точки.
На практике дифференциалы dU, dx, dy заменяют конечными приращениями, и формула (2.1) принимает вид:
В навигации принято записывать линейное уравнение (2.2) в виде:
где ДС/ == Uo -Uc, Дх == Хо -Хс, ^у = Уо-Ус - разности обсервованных и счислимых навигационных параметров и координат. Для графического решения задач определения места судна уравнения типа (2.3) используются в навигации в нормированном виде, получаемом при делении уравнения (2.3) на модуль градиента навигационной функции:
Здесь выражения (2.3) и (2.4) описывают линию положения, а М - перенос линии положения от счислимой точки по направлению вектора-градиента, т.е. по нормали к изолинии. Правая часть уравнения (2.4) полностью согласуется с выражением (1.4). В соответствии с приведенньми рассуждениями дадим определение линии положения: Линия положения - это касательная к навигационной изолинии в счислимой точке. Уравнение (2.4), с учетом формул п.1.1, может быть переписано в виде:
Рис. 2.1. Линия положения 2.2. Аналитический вариант расчета координат места судна по двум линиям положения Для определения места судна достаточно измерить два навигационных параметра, т.к. поверхность, на которой ищутся обсервованные координаты, -двухмерная (положение точки определяется двумя координатами). Алгоритм расчета таков: а) в момент времени t измеряются два навигационных параметра Uoi и Uo2, б) на этот же момент времени снимаются счислимые координаты Хс, ус и на них рассчитываются счислимые навигационные параметры Uci и Uc2, в) для счислимых координат рассчитываются коэффициенты линий положения Дц, т.е. частные производные по навигационным параметрам от навигационных функций; г) правые части уравнений линий положения рассчитываются по формулам: au] =U, l-Ucl, ^U2=^o2-Vc2; д) составляется система двух уравнений линий положения, которая может быть переписана в матричном виде:
где А - матрица коэффициентов линий положения, АХ- вектор неизвестных, AU-вектор измерений (вектор свободных членов); е) решение системы уравнений линий положения (2.6) запишется в виде:
•• / ж) если обозначить вектор счислимых координат как Хс, а вектор обсервованных координат как Ху, то можно записать:
Так как вследствие линеаризации навигационных функций появляются методические погрешности, то для их компенсации используется итерационная процедура (метод последовательных приближений), т.е. обсервованные координаты принимаются за новые счислимые (Хо=Хс}, и вычисления продолжаются согласно указаниям пп. б), а заканчиваются тогда, когда длина вектора АХ не будет меньше наперед заданной величины е. Для навигационных задач это составляет обычно 2-3 итерации. Расчет координат при избыточном числе измерений навигационных параметров Равноточные измерения Число навигационных измерений при определении места судна очень существенно. Если измеряются два навигационных параметра и определяются две координаты, то говорят, что в задаче отсутствует избыточность, т.е. система уравнений (2.6), как правило, совместна. Отсутствие избыточности измерений приводит к неконтролируемому влиянию различных видов погрешностей на результат, особенно опасны грубые промахи и систематические погрешности. Для получения более надежной обсервации применяют избыточные навигационные измерения. Пусть для определения координат измерены три навигационных параметра (п = 3), а определить нужно две координаты (k = 2). В этой ситуации избыточность r= n-k=1. Первоначально систему уравнений линий положения в матричном виде запишем так же, как систему уравнений (2.6):
однако матрицы будут иметь вид:
В данной системе количество неизвестных k меньше, чем количество уравнений п. Решение любых двух уравнений дает положение одной из вершин треугольника. Это означает, что подстановка этого решения в третье уравнение, не обратит его в тождеств \ Такая система называется несовместной, т.е. решение пары уравнений не совместно с третьим. Для получения согласованного решения системы необходимо ввести дополнительные условия. Если предположить, что систе
матические погрешности в измерениях отсутствуют, т.е. они определены и исключены специальными приемами измерений, то все остальные погрешности измерений можно считать случайными. Известно, что центром группирования случайных величин является их математическое ожидание или его оценка - среднее значение, которое наиболее близко к истинному значению и имеет минимальную дисперсию. Очевидно, что и в данном случае необходимо Рис. 2.2. К выводу формулы решения системы уравнений (2.7) найти некоторое среднее из трех точек, которое будет иметь статус оценки математического ожидания множества, состоящего из трех измерений. Ясно, что эта точка должна быть в фигуре погрешностей, а не вне ее. Несогласованность измерений возникает из-за погрешностей, которые называют невязками системы уравнений. Теперь вместо системы (2.9), с учетом невязок, более корректно следует записать следующее матричное уравнение (система уравнений поправок):
где V- вектор невязок (погрешностей), который имеет вид:
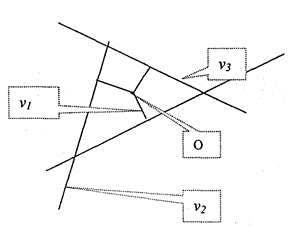
Если принять, что для получения согласованного решения линии положения необходимо сдвинуть внутрь фигуры погрешностей на некоторые величины v/, v^ и уз соответственно (рис. 2.2), то математическое условие поиска оптимального согласованного решения относительно этого среднего значения (точка О) определится в соответствии с формулой (2.11), т.е. минимальной длиной вектора V:
здесь величины v\, v-г. и уз, выраженные в единицах измерений, называются невяз
Рис. 2.3. Геометрическая интерпретация МНК Из формулы (2.10) запишем выражение относительно вектора невязок:
Взяв производную от выражения (2.12) по вектору неизвестных и приравняв ее к нулю, находим формулу для решения системы (2.10):
Система (2.13) называется системой нормальных уравнений. Теперь можно записать решение:
Знак «л» над вектором искомых величин свидетельствует о том, что решение получено с применением критерия оптимальности Q, Рис. 2.3 поясняет решение по МНК. После получения решения, согласно выражению (2.14) относительно счислимой точки в локальной системе координат, используется формула (2.8), а затем вьшолняется итерационная процедура. Точка, положение которой определяется вектором Хо, называется ввроятнвйшвй точкой. Неравноточные измерения В п. 2.3.1 никак не рассматривался вид погрешности измеряемых навигационных параметров, они считались равноточными, т.е. имеющими одинаковые средние квадратические погрешности т. В общем случае измерения навигационных параметров не являются равноточными, т.е. их средние квадратические погрешности могут отличаться, что и происходит на практике, если измерения выполнены различными приборами или различными наблюдателями. Естественно, что вероятнейшая точка, полученная по МНК, должна быть ближе к той линии положения, которая точнее, а поэтому уравнивание измерений происходит с учетом их весов - величин, обратно пропорциональных квадратам среднеквадратических погрешностей измерений, которые формируют так называемую весовую матрицу. Методика вывода ничем не отличается от предложенной в п. 2.3.1. Умножим слева правую и левую части уравнения (2.10) на матрицу W, которая имеет следующий вид:
здесь т - средняя квадратическая погрешность измерения соответствующего навигационного параметра. Получим следующее уравнение:
Теперь выражение (2.12) для Q перепишется так:
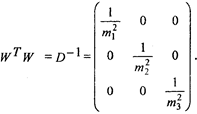
Используя изложенную ранее методику, получим систему нормальных уравнений с учетом неравноточных измерений, предварительно обозначив матрицу H^W-Kav. весовую матрицу D" 1:
Система нормальных уравнений запишется:
а решение будет иметь вид' AX=(ATD~lA)~\ATD~iAU Если элементы матрицы (2.18) равны, это означает, что измерения равноточные и выражение (2.20) превращается в выражение (2.14). Формула (2.20) имеет более общий характер, чем уравнение (2.14). Для определения координат опять воспользуемся формулой (2.8). Вероятнейшая точка, полученная по формуле (2.20), определяет средневзвешенные значения координат. Популярное:
|
Последнее изменение этой страницы: 2016-05-29; Просмотров: 707; Нарушение авторского права страницы