|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Основы теоретической механики
ВВЕДЕНИЕ
Повышение технического уровня и качества промышленной продукции, укрепление и дальнейшее развитие экономики и научно-технического потенциала страны требует подготовки высоко эрудированных, технически грамотных специалистов, обладающих не только определенными навыками, но и глубокими общетеоретическими и практическими знаниями. Одной из основных дисциплин общепрофессионального цикла является дисциплина " Основы технической механики". Назначение дисциплины – дать будущим техникам основные сведения о законах равновесия и движения материальных тел, о некоторых методах расчёта элементов машин и сооружений, об устройстве, области применения и основах проектирования деталей машин и простейших механизмов общего назначения. Знания и навыки, полученные учащимися при изучении дисциплины, необходимы для освоения ряда специальных и профилирующих дисциплин, выполнения курсовых и дипломных проектов, а также при практической работе на производстве. Методические указания содержат программный материал, перечень учебной литературы, общие методические указания, задания для контрольных работ с краткими методическими указаниями по их выполнению и приложения с необходимыми справочными данными.
ОБЩИЕ МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Программный материал дисциплины " Основы технической механики" состоит из разделов: 1. Основы теоретической механики 2. Основы сопротивления материалов 3. Детали механизмов и машин
Начиная изучение дисциплины, необходимо иметь один из предложенных в перечне литературы учебников, контрольные задания с методическими указаниями, а также дополнения к методическим указаниям, если они рекомендованы дополнительно.
Для закрепления учебного материала и приобретения навыков в использовании формул, уравнений, теорем необходимо разработать примеры и задачи, помещенные в учебниках или пособиях, а также решить самостоятельно возможно большее число задач.
После изучения соответствующей темы можно приступать к решению задач контрольной работы. Задачи контрольных работ даны в последовательности тем программы и поэтому должны решаться постепенно, по мере изучения материала.
Первая контрольная работа состоит из трёх задач по «Статике». Вторая контрольная работа состоит из четырёх задач по «Сопротивлению материалов» и «Деталям машин» Вариант контрольного задания определяется по двум последним цифрам шифра (номера личного дела) учащегося. Например, учащийся, имеющий шифр 563 выполняет вариант 63, имеющий шифр 1007 – вариант 07, имеющий шифр 300 – вариант 00. Если номер личного дела однозначный (1, 2, 3, …9), то для определения варианта перед номером личного дела дописывается цифра 0. Например, учащийся, имеющий шифр 4, выполняет вариант 04.
Таблица заданий по вариантам
Контрольные работы, выполненные не в соответствии с этими указаниями, не зачитываются и возвращаются без оценки. При выполнении контрольных работ необходимо сообщить следующие требования: - каждая контрольная работа выполняется в отдельной тонкой тетради (желательно в клетку); - на обложке тетради наклеивается специальный листок определённой формы; - выполняются работы обязательно чернилами, а рисунки и схемы – карандашом четко и аккуратно; для пометок и замечаний преподавателя следует оставлять поля шириной 30…40 мм, а в конце тетради – две-три страницы для рецензий; - тексты условий задач необходимо полностью переписывать; - решения задач должны поясняться необходимыми аккуратно выполненными схемами (эскизами) с указанием сил, моментов и других величин в соответствии с условием задачи; - решения задач выполняются вначале в общем, виде, после чего подставляются числовые значения и вычисляется окончательный результат. При решении задач контрольных работ необходимо применять только систему СИ. Для обозначения основных общетехнических единиц использовать только стандартные символы (обозначения). Перед окончательным оформлением решения задачи следует еще раз проверить правильность подстановки всех величин, обратив особое внимание на соблюдение размерности, правдоподобности полученных результатов, По возможности, необходимо проверить правильность ответов, решив задачу каким-либо иным путём. В конце полностью оформленной контрольной работы следует указать полностью наименование и год издания методического пособия, из которого взято задание, и использованную литературу. Выполненную контрольную работу следует своевременно выслать в техникум. После получения зачтенной контрольной работы необходимо, внимательно изучив рецензию и все замечания преподавателя, исправить допущенные ошибки, сделать необходимую доработку. Незачтённая контрольная работа выполняется заново полностью или переделывается частично по указанию рецензента, после чего вновь направляется для проверки. Зачтённая контрольная работа с необходимыми исправлениями и дополнениями предъявляется учащимся на экзамене.
Детали механизмов и машин
Тема 3.1. Основные понятия и определения Машина, классификация машин. Основные требования к машинам и их деталям, основные категории их работоспособности. Краткие сведения о стандартизации и взаимозаменяемости. Звено, кинематическая пара, механизм; классификация механизмов.
Тема 3.2. Соединения деталей Наразъёмные соединения; классификация, сравнительная оценка. Заклёпочные соединения; классификация, материалы. Сварные соединения; классификация, расчет на прочность швов стыковых и нахлёсточных соединений. Разъемные соединения; классификация. Резьбовые соединения. Крепёжные детали, материалы, способы стопорения. Штифтовые соединения, классификация. Шпоночные и шлицевые соединения; классификация, сравнительная оценка. Понятие о расчете шпоночных соединений на смятие.
Тема 3.3. Винтовые механизмы Винтовые механизмы; устройство, принцип работы, область применения, материалы. Классификация резьб, самотормозящая и несамотормозящая резьба. Понятие о расчете грузовых винтов и гаек.
Тема 3.4. Механизмы передачи вращательного движения Назначение механических передач. Основные кинематические и силовые соотношения для одно- и многоступенчатых передач классификация. Фрикционные передачи; устройство, принцип работы, область применения, классификация, кинематический и геометрический расчёты цилиндрической передачи; требуемая сила прижатия. Понятие о конической передаче. Понятие о вариаторах. Зубчатые передачи; устройство, принцип работы, область применения, классификация, сравнительная оценка. Основные параметры эвольвентного зацепления. Прямозубая цилиндрическая передача. Кинематический и геометрический расчёты. Виды разрушения зубьев. Материалы. Непрямозубые цилиндрические передачи; особенности геометрического расчёта. Понятие о конической зубчатой передаче и особенностях её кинематического и геометрического расчётов. Червячные передачи; устройство, принцип работ, область применения, классификация, сравнительная оценка. КПД передачи. Материалы. Ременные передачи; устройство, принцип работы, область применения, классификация, сравнительная оценка. Материалы. Кинематический и геометрический расчёты. Понятие об упругом скольжении и расчёте по тяговой способности. Цепная передача; устройство, принцип работы, область применения, сравнительная оценка. Кинематический расчёт. Понятие о расчёте приводных цепей на износостойкость.
Тема 3.5. Механизмы поступательного, колебательного и прерывистого движения Рычажные, кулачковые и храповые механизмы; их устройство, принцип работы и область применения.
Тема 3.6. Направляющие вращательного движения Валы и оси; назначение, конструкции, материалы. Опоры скольжения, качения, сравнительная оценка. Цилиндрические опоры скольжения; конструкции, материалы. Опоры качения, устройство, классификация. Понятие о расчёте на динамическую грузоподъемность.
Тема 3.7. Муфты Назначение, классификация. Устройство жестких, компенсирующих и фрикционных муфт.
Список литературы
1.Мовнин М.. и др. Основы технической механики. – Л., 1982, 1978. 2.Куприянов Д.Ф., Метальников Г.Ф. Техническая механика – М., 1975. 3.Аркуша А.И. Руководство к решению задач по технической механике – М. 1976. 4.Мовнин М.С. и др. Руководство к решению задач по технической механике – М. 1997. 5.Багреев В.В. и др. Сборник задач по технической механике – Л., 1975. 6.Рубашкин А.Г., Чернилевский Д.В. Руководство по проведению лабораторных работ по технической механике – М., 1984. 7.Аркума А.И. Техническая механика – М., 2000. 8.Завистовский В.Э., Захаров Н.М. Техническая механика – М., 2000. 9.Мархель И.И. Детали машин – М., 1977.
Изучение теоретического материала по учебникам [1] или [2] необходимо сопровождать разбором задач, подробное решение которых приведено в руководствах [3] и [4] (номера задач по руководству [4] указаны в табл.2), а также самостоятельным решением задач по рекомендованному в списке литературы сборнику задач [5].
Рис. 1
Обе полученные реакции оказались положительными. Это указывает на то, что выбранное направление силы RAB – верное, т.е. стержень растянут. Необходимо отметить, что каждое из составленных уравнений равновесия содержало оба неизвестных, чего можно было бы избежать, направив иначе координатные оси, т.е. проведя одну из осей (например, ось Х) по направлению действия неизвестной силы (например, вдоль стержня АВ), а другую ось – перпендикулярно. Правильность решения проверяем графоаналитическим методом с использованием тригонометрических соотношений. Для этого строим замкнутый силовой треугольник (рис.!, в); проводим из произвольной точки С вертикально вниз вектор заданной силы F, через начало и конец которого проводим известные направления реакции RАВ стержня и силы натяжения троса G. Построенный силовой треугольник сbа решаем, используя теорему синусов:
Из решения пропорций находим:
Таким образом, убедились, что G и RAB определены верно.
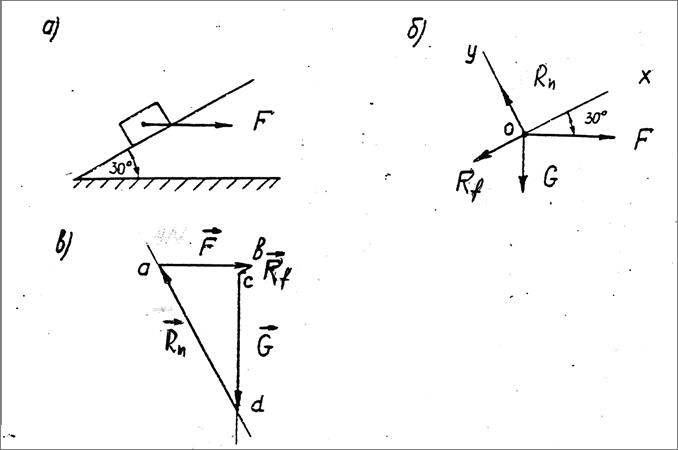
Пример 2. Под действием горизонтальной силы F = 7, 5H (рис. 2а.) тело перемещается равномерно вверх по наклонной плоскости. Определить вес тела и нормальную реакцию наклонной плоскости, если сила трения Rf = 1, 5 H. Решение. Проводим решение задачи аналитическим методом. Рассмотрим равновесие тела на наклонной плоскости, заменив действие связей на их реакции. В точке 0 сходятся линии действия всех действующих на тело сил – вес тела G, горизонтальной силы F, силы трения Rf, направленной вдоль наклонной плоскости вниз и нормальной реакции Rh, перпендикулярной наклонной плоскости. Расчётная схема показана на рис. 2, б.
Рис. 2
Совместим ось Х с направлением наклонной плоскости, а ось У с направлением неизвестной силы Rn= Составляем два уравнения равновесия для плоской системы сходящихся сил:
∑ Fix = 0; F cos 30o – Rf – Gsin30o = 0 (1) 7, 5 · 0, 866 – 1, 5 –G · 0, 5 = 0
∑ Fiy = 0; Rn – G cos 30o – F sin 30o = 0 (2) Rn – G · 0, 866- 7, 5 · 0, 5 = 0 Определяем неизвестные силы G и Rn решаем полученную систему уравнений. Из уравнения (1): G = (7, 5 × 0, 866 – 1, 5)/0, 5 » 10 Н. Подставляем найденное значение G в уравнение (2) и получаем: Rn = G · 0, 866 + 7, 5 · 0, 5 = 10 · 0, 866 + 7, 5 · 0, 5 = 12, 41 H. Оба полученных результата – положительны, т.е. выбранные направления сил оказались верными. Правильность решения задач проверим, определив неизвестные силы графически. Так как система сходящихся сил (рис. 1, б) находится в равновесии, то силовой многоугольник, построенный для этой системы сил, должен быть замкнутым. Выбираем масштаб сил (например µF = 4 Измерив длины этих сторон (в см.) и умножив на принятый масштаб сил µF , получим величины сил: G = cd · µF = 2, 6 · 4 » 10, 4 H Rh = d · a · µF = 3, 2 · 4 » 12, 8H т.е. примерно такие же значения, как и при аналитическом решении. Необходимо учитывать, что точность графического решения выше, чем точнее выполнено графическое построение и чем крупнее выбран масштаб построения. К задачам 11…30. Решение этих задач можно начинать изучения тем 1.3. и 1.4. и повторения вопросов, касающихся определения направлений реакций, возникающих в наиболее часто встречающихся видах связей и балочных системах. В задачах 11…20 необходимо определить опорные реакции тел, находящихся в равновесии под действием произвольной плоской системы сил. При решении этих задач следует обратить особое внимание на методику рационального выбора направления координатных осей и центров моментов. При составлении уравнений равновесия для тел, на которое действует плоская система произвольно расположенных сил, надо помнить, что только три из них являются независимыми, поэтому в решаемой задаче может быть не более трех неизвестных величин. Остальные составленные уравнения могут служить только для проверки решения задачи. Последовательность решения задачи: 1) выбирается тело, равновесие которого рассматривается; 2) тело освобождается от связей и изображаются на схеме все действующие на него заданные силы и реакция отброшенных связей; 3) выбирается система координатных осей и центр вращения и составляются уравнения равновесия (не более трех); 4) определяются искомые величины путем решения составленных уравнений равновесия; 5) проверяется правильность решения с помощью уравнений, которые не использовались при определении неизвестных сил. Пример 3. Однородный столб АВ весом 50 кН и длиной 5м (рис. 3, а), опирается на горизонтальный пол в точке А и на выступ стены в точке С. В точке А к столбу прикреплен горизонтальный трос, поддерживающий его в состоянии равновесия. Пренебрегая трением, определить реакции, возникающие в точках А и С и силу вытяжения троса. Решение. Рассмотрим равновесие столба АВ, на который действуют следующие силы: G – вес столба, приложенный в его центре тяжести и реакции отброшенных связей – RA – реакция пола в точке А, RC - реакция выступа стены в точке С. RAД – сила натяжения троса. Расчетная схема показана на рис. 3, б. Выбираем направление осей координат и центр вращения точку А и составляем три уравнения равновесия. ∑ МА= 0; G · AD · cos 60o – Rc · AC = 0 (1) 50 · 2, 5 · 0, 5 – Rc · 3, 5/0, 866 = 0 где АС = ∑ Fix = 0; RAD – RC · cos 30o = 0 (2) RAD – RC · 0, 866 = 0 ∑ Fiу = 0; RA – RC · sin 30o = 0 (3) RA – 50 + RC · 0, 5 = 0 OC = AC – A0 =
Рис. 3
Определяем неизвестные силы RA, RC, RAD из уравнения (1):
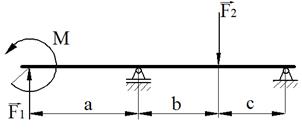
Подставляем найденное значение в уравнение (2) и получаем: R AD = RC · 0, 866 = 13, 39 kH Подставляем вычисленное значение силы RC в уравнение (3) получаем: RA = 50 – 15, 460 · 0, 5 = 42, 27 kH Правильность полученных результатов проверим, составив и решив дополнительно уравнение равновесия, которое не было использовано при вычислении неизвестных сил, например: ∑ МС = 0; RA · AC · cos 60o – RAD · AC · sin60 – G cos60o · OC = = 42, 27 · Условие равновесия ∑ МС = 0 выполняется, следовательно, задача решена верно. В задачах 21…30 требуется определить опорные реакции консольной балки, т.е. балки с одной опорой в виде жесткого защемления. Для такой балки наиболее целесообразно составить уравнение равновесия в форме: ∑ FIX = 0 (1); ∑ FIУ = G (2); ∑ МА = 0 (3), где за центр моментов принять точку в месте защемления. Проверка правильности решения задачи проводится составлением уравнения равновесия моментов всех сил относительно любой другой точки. В задачах 31-40 требуется определить опорные реакции двухопорной балки, нагруженной системой параллельных сил. Для такой балки целесообразно составить 2 уравнения равновесия Приобретение твердых навыков в определении опорных реакций в жестко защемленных и двухопорных балках необходимо. т.к. именно с этого начинается решение многих задач, рассматриваемых в сопротивлении материалов и деталях машин. Последовательность решения задачи: вычерчивается балка с приложенными к ней нагрузками; выбирается направление осей координат, причем горизонтальная ось Х направляется вдоль оси балки, а ось У – ей перпендикулярна; балка освобождается от опор, и их действие заменяется опорными реакциями, направленными вдоль осей координат с реактивным моментом; составляются уравнения равновесия, желательно так, чтобы в каждом из составленных уравнений было бы не более одной неизвестной величины; определяются неизвестные величины реакций путём решения составленных уравнений равновесия; проводится проверка вычисленных результатов путём составления дополнительного уравнения, которое не было использовано для определения неизвестных реакций. Пример 4. Определить опорные реакции, возникающие в консольной балке (рис.4). Решение. Рассмотрим равновесие жестко защемленной балки с заданными нагрузками. Вычерчиваем эту балку с приложенными к ней силами F1, F2 и моментом М. Направляем ось Х вдоль оси балки и перпендикулярно к ней – ось У (рис.4, а) и выбираем центр вращения т.А. Отбрасываем связь (заделку) и заменяем её действие реакциями – реактивным моментом МR и составляющими реакциями Rx и Ry по осям координат. Расчетная схема показана на рис. 4, б
Рис. 4
Для получения плоской системы произвольно расположенных сил составляем три уравнения равновесия:
- MR + 9.1-7+4.4 =0 (1)
Определяем опорные реакции жестко защемленной балки, решая составленные уравнения равновесия. Из уравнения (1): MR = 9 . 1 – 7 = 4 . 4 = 9 – 7 + 16 = 18 kHм; Из уравнения (2): Rx= 6, 93 kH; Из уравнения (3): Ry = 9 + 4 = 13 kH. Проверяем правильность найденных результатов, составив проверочное уравнение равновесия:
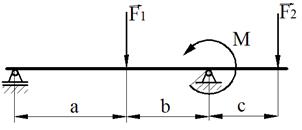
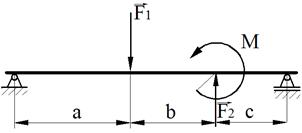
Условие равновесия К задачам 31…40 Пример 5. Определить опорные реакции двухопорной балки, нагруженной системой параллельных сил. Решение. Рассмотрим равновесие балки. Вычерчиваем эту балку с приложенными к ней силами F1, F2, M. Направляем оси Х и У и выбираем центр вращения точки А и В. В точке А горизонтальная составляющая равна 0, поэтому на балку действует система параллельных сил.
Рис. 5
Составляем уравнения равновесия
В каждом из уравнений только по одному неизвестному. Из уравнения (1)
Из уравнения (2)
Проверяем правильность решения, составив проверочное уравнение
Условие равновесия
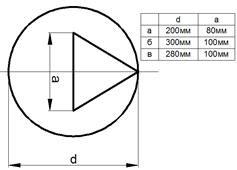
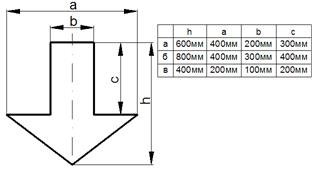
К задачам 41…50. К решению этих задач следует приступить после изучения темы " Центр тяжести" и разбора примера. С целью упрощения решения следует стремиться разбить заданное сложное сечение на возможно меньшее число простых фигур. Пример 6. (рис.6) Для заданногоплоского сечения (тонкой однородной пластины) определить положение центра тяжести. Решение. 1. Разбиваем сложное сечение пластины на простые фигуры: I – прямоугольник, II- круг, III – треугольник. 2. Определяем положение центра тяжести каждой простой фигуры С1, С2, С3. 3. Выбираем вспомогательную ось уi так, что всё сечение будет находиться в первой четверти. 4. Определяем площади поперечного сечения каждой простой фигуры А1, 5. Определяем расстояние Х1, Х2, Х3 от центра тяжести каждой простой фигуры до вспомогательной оси Уi А1 = 310 .120 = 37200 мм2 Х1 = А2 = А3 = 6. Так как сечение имеет одну ось симметрии (горизонтальную, то координату у2 определять не надо. 7. Координата центра тяжести ХС определяем по формуле:
8. По полученным координатам ХС, УС находим центр тяжести плоского сечения С. Вывод: Таким образом, плоская однородная пластина имеет координаты центра тяжести С (167мм; 0).
Рис. 9
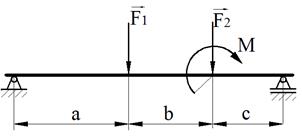
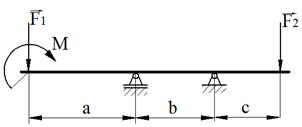
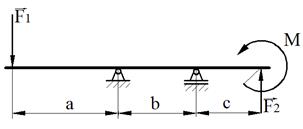
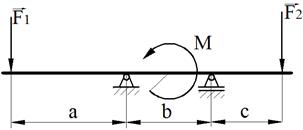
Задачи 31…40. Для заданной двухопорной балки (рис.10; табл.2) определить реакции опор.
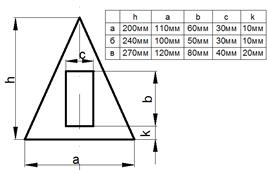
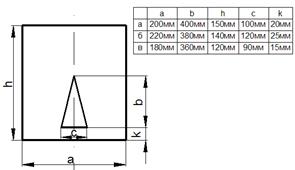
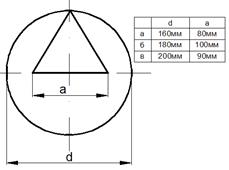
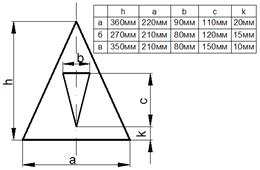
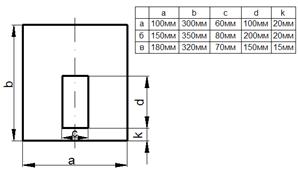
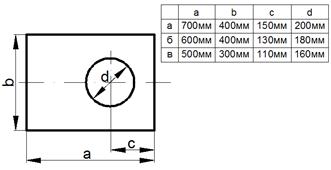
Рис. 10 Задачи 41…50. Для заданной тонкой однородной пластины определить положение центра тяжести (рис.11)
Таблица №1
Таблица 2
Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 665; Нарушение авторского права страницы
 =
=  =
= 
 =
=  = 1, 46кН
= 1, 46кН
 ) и строим силовой многоугольник в выбранном масштабе (рис. 2в): от произвольной точки aоткладываем заданную силу F
) и строим силовой многоугольник в выбранном масштабе (рис. 2в): от произвольной точки aоткладываем заданную силу F  , затем из точки b под углом 30о к горизонту откладываем известную силу Rf
, затем из точки b под углом 30о к горизонту откладываем известную силу Rf  , далее из точек a и cпроводим прямые, параллельные направлениям сил G и Rn.Эти прямые пересекаются в точке d; в результате построения получили силовой многоугольник abcd, в котором сторона
, далее из точек a и cпроводим прямые, параллельные направлениям сил G и Rn.Эти прямые пересекаются в точке d; в результате построения получили силовой многоугольник abcd, в котором сторона  , а сторона
, а сторона  .
. =
= 

 = 0,
= 0,  = 0
= 0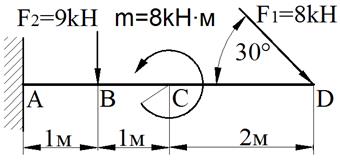 а)
а) 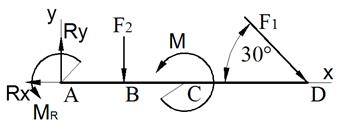 б)
б) ; - МR + F2. AB – M + F1y. AD = 0
; - МR + F2. AB – M + F1y. AD = 0 ; Fix – Rx = 0; 6, 93 – Rx = 0 (2)
; Fix – Rx = 0; 6, 93 – Rx = 0 (2) ; Ry – F2 – Fiy = 0; Ry- 9 – 4 = 0 (3)
; Ry – F2 – Fiy = 0; Ry- 9 – 4 = 0 (3) = Ry . AD – MR – F2.BD – M = 13 . 4 – 18 – 9 . 3 – 7 = 52 – 52 = 0.
= Ry . AD – MR – F2.BD – M = 13 . 4 – 18 – 9 . 3 – 7 = 52 – 52 = 0. а)
а) 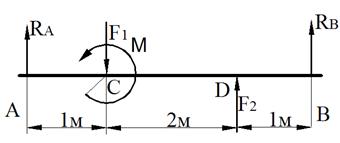 б)
б) = 0 F1 . AC – M – F2 . AD – RB = 0 (1)
= 0 F1 . AC – M – F2 . AD – RB = 0 (1)

 8, 5 – 12 + 10 – 6, 5 = 18, 5 = 0
8, 5 – 12 + 10 – 6, 5 = 18, 5 = 0 выполняется, следовательно, реакции опор определены верно.
выполняется, следовательно, реакции опор определены верно. Рис. 6
Рис. 6 
 Х2 = 80 мм
Х2 = 80 мм Х3 = 210 мм.
Х3 = 210 мм.