|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Абстрактный синтез управляющего автомата
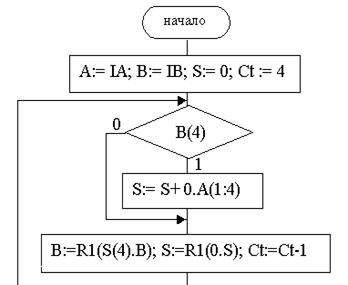
Функция управляющего автомата задаётся кодированной граф-схемой алгоритма (ГСА) микропрограммы. Кодированную ГСА (рисунок 5, б)) получают путём замены в содержательной ГСА (рисунок 5, а) микрооператоров (наборов совместимых микроопераций) на коды микрокоманд, а логических условий на их идентификаторы.
а) б)
Рисунок 5 - Фрагмент содержательной (а) и кодированной (б) ГСА микропрограммы
3.1.1 Получение отмеченной ГСА
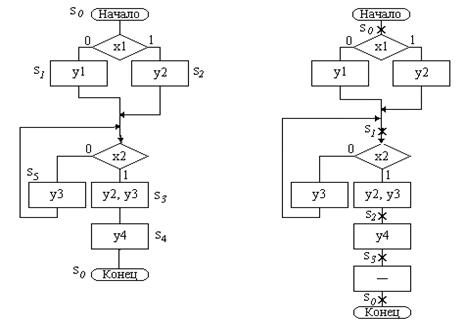
Абстрактный синтез управляющего автомата начинается с отметки внутренних состояний кодированной ГСА. Отметка состояний должна соответствовать закону функционирования автомата Мура или Мили, то есть выполняется для них различным образом. Будем полагать, что автомат начинает работу с состояния s0, в котором он не вырабатывает никаких выходных сигналов и после выполнения микропрограммы снова оказывается в этом же состоянии. Затем автомат переходит в состояния, предписанные законом функционирования, и формирует микрокоманды y, соответствующие текущим значениям сигналов x. Момент окончания выполнения микропрограммы отмечается возвратом автомата в начальное состояние s0. Поскольку в автомате Мура выходные сигналы связаны только с состоянием автомата, то каждой операторной вершине нужно поставить в соответствие одно из состояний автомата. Правило отметки состояний автомата на ГСА микропрограммы будет выглядеть следующим образом: - символом s0 отмечаются начальная и конечная вершины ГСА; - каждая операторная вершина отмечается единственным символом s1, s2, s3, s4, s5, ...; - две различные операторные вершины не могут быть отмечены одинаковыми символами. На рисунке 6, а) представлена ГСА, отмеченная по приведенному выше правилу. В каждом такте автомат Мура, интерпретирующий данную микропрограмму, переходит из одного состояния в другое и выдаёт соответствующие выходные управляющие сигналы yi. Порядок выдачи выходных сигналов yi определяется значениями входных сигналов xi. Так, при наличии входного сигнала х1 = 0 автомат из состояния s0 перейдет в состояние s1 и выдаст выходной сигнал у1. В следующем такте работы под воздействием входного сигнала х2 = 1 автомат из состояния s1 перейдёт в состояние s3 с выдачей выходных сигналов у2 и у3. Если для интерпретации закодированной ГСА используется автомат Мили, то отметка граф-схемы производится в следующем порядке: - символом s0 отмечается выход начальной и вход конечной вершины; - символами s1, s2, ... отмечаются входы вершин, следующие за операторными вершинами; - входы двух различных вершин не могут быть отмечены одинаковыми символами; - входы вершины могут отмечаться только одним символом состояния. Приведенные правила означают, что если вершина имеет несколько входов, то символом состояния отмечается их подмножество, состоящее из входов, следующих только за начальной или за операторными вершинами. Если один из входов конечной вершины соединен с выходом операторной вершины, то между ними необходимо ввести пустую операторную вершину, иначе автоматы Мура и Мили, построенные по одной ГСА не будут эквивалентными. На рисунке 6, б) представлена ГСА, отмеченные по приведённому выше правилу.
а) б)
а - для автомата Мура, б - для автомата Мили.
Рисунок 6 – Отмеченные граф-схемы
3.1.2 Построение графа-переходов или функционирования автомата
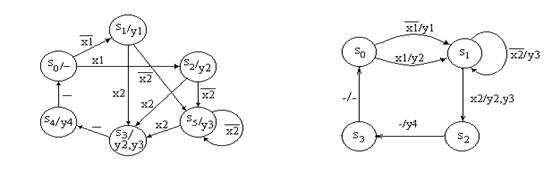
Для автоматов Мура и Мили их внутренние состояния представляются вершинами графа. Внутренние переходы от одного состояния к другому изображаются направленными дугами. Для автоматов Мили и Мура значение входного сигнала, вызывающего этот переход из текущего состояния s(t) в последующее s(t+1), приписывается соответствующей дуге. Для автомата Мура значения выходных сигналов зависят только от внутреннего состояния и поэтому приписываются соответствующей вершине. Таким образом, на графах отображаются обе характеристические функции конечного автомата. Граф автомата Мура, построенный по ГСА, представлен на рисунке 7, а). При формировании графа для автомата Мили необходимо учитывать, что значения выходных сигналов y(t), определяемые значениями текущего состояния s(t) и входных сигналов х(t), ставятся в соответствие самой дуге. Граф автомата Мили приведен на рисунке 7, б).
а) б)
а - для автомата Мура, б - для автомата Мили.
Рисунок 7 – Графы функционирования автоматов
3.1.3 Построение таблицы переходов и выходных функций
Для автомата Мура в ячейках таблицы переходов-выходов для каждой пары значений аргументов х(t), s(t) проставляются будущие внутренние состояния s(t+1). Значения выходных сигналов y(t) представляются в отдельном столбце. Пример табличного представления функций автомата Мура приведен на рисунке 8, а). Для автомата Мили в ячейках таблицы переходов-выходов для каждой пары значений аргументов проставляются будущие внутренние состояния и текущие значения выходных сигналов. Пример табличного представления функций автомата Мили приведен на рисунке 8, б).
а) б)
а - для автомата Мура, б - для автомата Мили.
Рисунок 8 – Табличное представление функций Популярное:
|
Последнее изменение этой страницы: 2016-08-31; Просмотров: 915; Нарушение авторского права страницы