
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Позиционные (релейные) регуляторыСтр 1 из 5Следующая ⇒
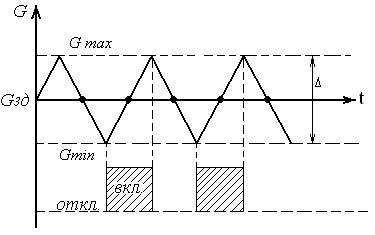
Позиционные (релейные) регуляторы Позиционные регуляторы бывают: - 2-хпозиционные; - 3-хпозиционные; - многопозиционные; Двухпозиционным называется регулятор, в котором в зависимости от значения регулируемого параметра регулирующий орган может занимать только два фиксированных положения: открыто или закрыто, (включено или выключено). Закон регулирования двухпозиционного регулятора: µ=1 при G < GЗД (включено); µ=0 при G > GЗД (отключено). Переходной процесс регулирования – изменение регулируемого параметра во времени в процессе регулирования. Вид переходного процесса двухпозиционного регулирования представлено ниже: а) двухпозиционное регулирование без зоны нечувствительности; б) двухпозиционное регулирование с зоной нечувствительности а)
б ) Закон регулирования двухпозиционного регулятора с зоной нечувствительности: µ = 1 при G< GЗД + ∆ /2; µ = 0 при G> GЗД - ∆ /2.
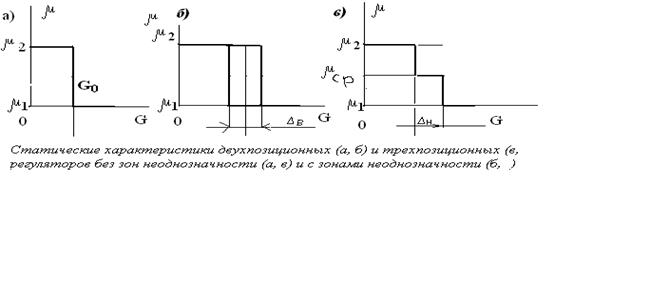
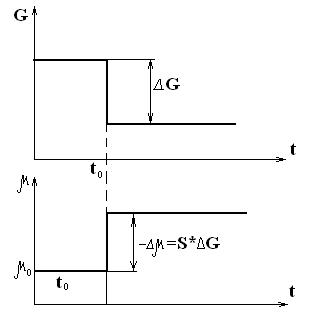
(G – значение регулируемого параметра; GЗД – заданное значение регулируемого параметра; μ – положение регулирующего органа.) Двухпозиционные регуляторы с зоной нечувствительности (неоднозначности) имеют единственный параметр настройки − величину зоны нечувствительности ∆. С увеличением зоны нечувствительности качество регулирования ухудшается, но уменьшается число срабатывания аппаратуры. Под качеством регулирования понимают величину отклонения регулируемого параметра от заданного значения GЗД. Трехпозиционные регуляторы. Трехпозиционным называется регулятор, у которого в зависимости от значения регулируемого параметра регулирующий орган может занимать помимо двух крайних положений еще одно среднее положение. Закон регулирования трехпозиционного регулятора: μ = 1 при G< (GЗД - ∆ /2); μ = 0, 5 при (GЗД - ∆ /2)< G < (GЗД +∆ /2); μ = 0 при G> (GЗД + ∆ /2); Трехпозиционные регуляторы имеют существенное преимущество по сравнению с двухпозиционными регуляторами. Если при значении μ СР можно установить равенство притока и оттока вещества или энергии в объекте, т.е. при µСР QПР = QРАСХ, то значение регулируемого параметра G практически не будет изменяться, т.е. будет находиться вблизи заданного значения GЗД Динамическая характеристика пропорционального регулятора
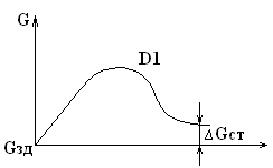
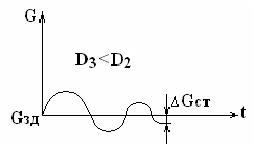
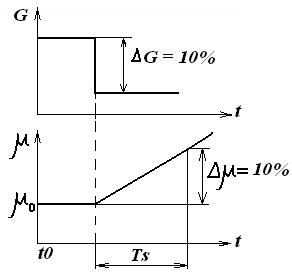
Если на регулятор нанести ступенчатое возмущение, то регулирующий орган перемещается практически мгновенно на величину ∆ μ – это свидетельствует о том, что П-регуляторы обладают высоким быстродействием. Чем меньше настраиваемый параметр регулятора D (предел пропорциональности), тем более колебательным будет переходной процесс и тем меньше по величине будет статическая ошибка регулирования ∆ Gст.
Переходной процесс регулирования D1=200%, s=0, 5; D2=100%, s=1; D3=40%, s=2, 5;
Апериодический переходной процесс
Переходной процесс с 20%-м перерегулированием
Колебательный затухающий переходной процесс
С понижением предела пропорциональности D колебания переходного процесса увеличиваются и увеличивается соответственно время регулирования. При D< 5% П-регулятор превращается в двухпозиционный. Недостаток П-регулятора: наличие статической ошибки регулирования ∆ Gст. Достоинства: 1. Высокое быстродействие 2. Дает устойчивое АСР со статическими или астатическими объектами. Интегральные (астатические) регуляторы
Интегральными (И-регуляторами) – называют регуляторы, у которых скорость перемещения регулирующего органа пропорциональна величине отклонения регулируемого параметра от заданного значения. Закон интегрального регулятора в дифференциальной форме:
где S1 – коэффициент пропорциональности, S1=1/TS, где TS – время перемещения регулирующего органа. Чем на большую величину отклоняется регулируемый параметр от заданного значения, тем быстрее будет перемещаться регулирующий клапан. Схема И-регулятора прямого действия
Закон регулирования И-регулятора в интегральной форме:
Ts-время перемещения регулирующего органа, является единственным параметром настройки И-регулятора. Динамическая характеристика И-регулятора Пропорционально-интегрально-дифференциальные (ПИД) регуляторы Закон регулирования ПИД-регулятора:
где ПИД-регуляторы имеют 3 параметра настройки: - D – предел пропорциональности (изменяется от 5% до 3000%); -Тi – время изодрома (5 сек - 100 мин); Тд – время предворения (5 сек - 10 мин). ПИД закон регулирования дает лучшие качества регулирования по сравнению с другими законами. ∆ у - максимальное динамическое отклонение, tР - время переходного процесса (время регулирования) – чем меньше эти величины, тем лучше качество регулирования. Автоматические регуляторы Пневматические регуляторы Широко используются на химическом производстве. Достоинства: 1. Абсолютно пожаро-взрывобезопасносны; 2. Простота конструкций; 3. Низкая стоимость; 4. Достаточная надежность работы в тяжелых производственных условиях; 5. Возможность организации на их основе сложных АСР. Недостатки: 1. Низкое быстродействие; 2. Сравнительно небольшие расстояния для передачи пневматических сигналов (до 300 м); 3. Требуется специальное питание сжатым воздухом. Сжатый воздух должен быть тщательно очищен и осушен с давлением 1, 4 кгс/см2 или 140 кПа ± 10%. Элементная база пневмоавтоматики основывается на элементах УСЭППА – (универсальная система элементов промышленной пневмоавтоматики). Из стандартных элементов собирают различные устройства пневмоавтоматики, в том числе функциональные блоки, регуляторы, вычислительные устройства и измерительные преобразователи. Рассмотрим основные элементы УСЭППА: 1. Постоянный дроссель; 2. Регулируемый дроссель; 3. Пневматическая емкость; 4.
Дроссельный сумматор.
Дроссельный сумматор предназначен для суммирования давлений с одновременным умножением на коэффициенты.
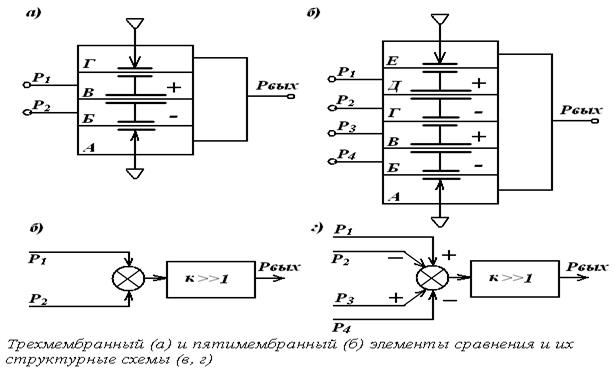
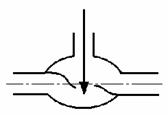
Элементы сравнения Предназначены для сравнения двух или четырех входных сигналов и формируют на выходе дискретные сигналы 0 или 1. А, Б, В, Г- камеры образованные мембранами с жестким центром; Р1, Р2 - входные давления воздуха; РВЫХ – выходной сигнал. Трехмембранный элемент сравнения на два входа состоит из четырех камер, ограниченных секциями корпуса и блоком трех мембран, связанных между собой штоком и закрепленных по периметру. Площадь средней мембраны превышает крайних. Жесткие центры крайних мембран, служат заслонками сопл в камерах А и Г. Камеры А и Г сообщены между собой. Воздух питания через верхнее сопло поступает в камеру Г. Через нижнее сопло камера А сообщается с атмосферой. Давление в камерах А и Г – выходной сигнал элемента сравнения РВЫХ. Входные сигналы Р1 и Р2 подаются в камеры В и Б. Блок сравнения находится под воздействием сил, развиваемых давлениями в камерах элемента сравнения. Мембраны обладают малой жесткостью и поэтому даже при рассогласовании входных давлений, равном 150 – 200 Па, суммарное усилие достаточно для перемещения блока мембран в одно из крайних положений. При Р1 При Р1< Р2, мембранный блок смещается вверх, сопло в камере Г закроется, и прекратится подача воздуха питания, а сопло в камере А откроется, и линия выхода элемента сравнения сообщится с атмосферой. При этом сигнал на выходе станет равным 0. Таким образом, трехмембранный элемент сравнения представляет собой пневматическое реле, обрабатывающее зависимость:
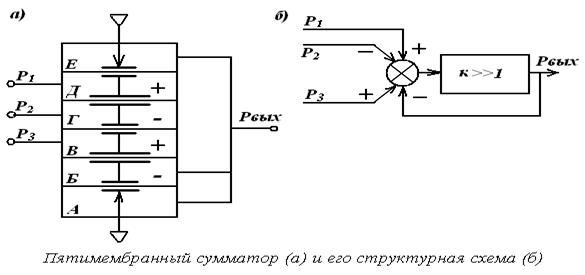
Пятимембранный элемент сравнения имеет четыре входа. Состоит из шести камер, разделенных пятью мембранами, связанными в блок. Входные сигналы поводятся в камеры Б, В, Г и Д. Выходной сигнал отводится из камер А и Е. В остальном конструкция и работа аналогичны трехмембранному элементу сравнения. Он представляет собой пневматическое реле и обеспечивает выполнение операции
Пятимембранный элемент сравнения (сумматор ). В пневматических приборах элементы сравнения часто используют в качестве мембранного сумматора для алгебраического суммирования непрерывных выходных сигналов.
Для этого выходной сигнал РВЫХ направляют в камеру Б, камеру отрицательной обратной связи. Элемент приходит в равновесие, когда усилия, развиваемые входными давлениями, уравновешиваются усилием, создаваемым РВЫХ = РБ и расходы воздуха в камерах Б, В, Г и Д одинаковы, то при равновесии справедливо равенство РВЫХ = Р1 – Р2 – Р3. Следовательно, при такой коммутации элемент сравнения выполняет функцию сумматора, который складывает два сигнала со знаком «плюс» и один со знаком «минус». Р1, Р2, Р3 изменяются в пределах от 0, 2÷ 1кгс/см2. Исполнительные устройства Выполняют команды регуляторов. Исполнительные устройства (ИУ) включают два основных элемента: 1) регулирующий орган; 2) исполнительный механизм (ИМ) Они предназначены для непосредственного показания управляющих воздействий на объект управления. Сигналы управляющих воздействий на ИМ подаются от автоматических регуляторов или от управляющей вычислительной машины УВМ. Классификация ИМ : 1. электрические; 2. пневматические; 3. гидравлические; 4. электропневматические; 5. электрогидравлические; 6. пневмогидравлические. По конструкции регулирующего органа: 1. заслоночные; 2. шаровые; 3. шланговые; 4. диафрагмовые; 5. односедельные; 6. двухседельные; 7. трехходовые. По способу действия: 1. нормально открытый; закрытый клапан (входящий закрыт); 2. нормально закрытый; клапан открыт (в_ходящий открыт). По функциональному назначению: 1. регулирующие; 2. запорные; 3. комбинирующие. Регулирующий орган плавно изменяет расход среды в зависимости от полученного управляющего сигнала. Запорные клапаныиспользуют для позиционного регулирования, имеют 2 положения: «открыт» – «закрыт». По расходной характеристике: 1. линейная характеристика; 2. логарифмическая характеристика; 3. специальная расходная характеристика (нелинейная). По конструкции исполнения: 1. обыкновенные; 2. пожаро- и взрывобезопасные.
Электрические ИМ Электрические ИМ включают в себя: 1. электродвигатель с редуктором в качестве ИМ; 2. регулирующий орган, который механически связан с редуктором. Используются исполнительные устройства с соленоидом в качестве ИМ. Такие ИУ используются для позиционирующего регулирования, т.е. они имеют два положения: «открыт» – «закрыт» (например, подано на соленоид напряжение или отсутствует). Для непрерывного регулирования используются регулирующие органы с электродвигателем в качестве ИМ. Для управления ИМ (электродвигателями) необходимо предусмотреть магнитные пускатели. Используются обычно бесконтактные магнитные пускатели, которые управляются дискретным сигналом от регулятора или УВМ (0÷ 24В). Могут использоваться одно или трехфазные электродвигатели.
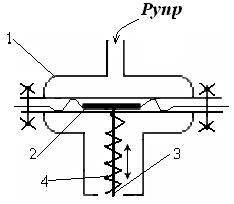
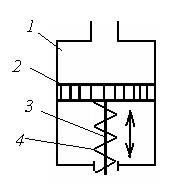
Пневматические ИМ (ПИМ) Используются ПИМ 2-х видов: · мембранные; · поршневые. Мембранный
1 – корпус; 2 – вялая мембрана с жестким центром; 3 – шток; 4 – пружина. Поршневой
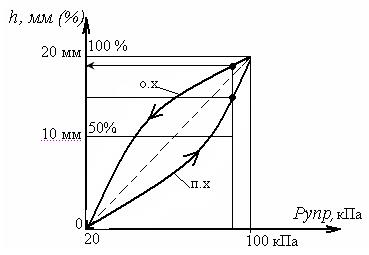
1 – цилиндр; 2 – поршень; 3 – шток; 4 – пружина. Регулирующий орган 1 – корпус регулирующего органа (РО); 2 – седло; 3 – двухседельный клапан; 4 – шток; 5 – пружина; 6 – вялая мембрана с жестким центром; 7 – верхняя тарелка; 8 – сальник уплотнительный; Рупр – управляющий пневматический сигнал. Двухседельный клапан более предпочтителен по сравнению с односедельным, т.к. давление потока разветвляется и в меньшей мере воздействует на мембрану. Ходовая характеристика представляет собой зависимость перемещения РОот значения управляющего сигнала (─ ─ ─ ─ ) - ходовая характеристика ИМ. При наличии позиционера гистерезис полностью отсутствует.
Перемещение РО при увеличении управляющего сигнала и уменьшения его не совпадают. Это обусловлено наличием гистерезиса в ходовой характеристике ИМ. Обусловлен гистерезис в основном наличием трения в уплотнительном сальнике и зависит от чистоты обработки штока. Максимально допустимое значение гистерезиса составляет не более 10%. Чтобы полностью избавиться от гистерезиса устанавливают на ИМ дополнительное устройство – позиционер. Это пневматический усилитель, который имеет отдельное питание и обратную связь со штоком. На позиционер подается управляющий сигнал от регулятора, а выходной сигнал от позиционера подается на мембрану ИМ. На всех ИМ большого размера установка позиционера обязательна.
Рупр ·Fм = c·L
Пропускная способность РО (k) – это расход жидкости в м3/ч, плотностью 1000 кг/м3. Пропускаемой РО при перепаде давления на нем 100 кПа (1 кгс/см2).
где k – зависит от поперечного сечения щели клапана и от величины перепада давления Δ Р; Δ Р – разность давлений до клапана и после; ρ – плотность среды, которая проходит через клапан. Конструкции РО:
Для управления заслонками и шиберами используют поршневые пневматические ИМ, которые имеют достаточно большой ход штока (максимально до 400 мм). Кроме того, поршневые ИМ выпускаются со встроенным позиционером, поэтому в их ходовой характеристике полностью отсутствует гистерезис. Диафрагмовый РО
Шланговые РО
Наиболее благоприятной для АСР является линейная расходная характеристика, однако получить такую характеристику затруднительно, т.к. требуется сложная конструкция золотника.
Позиционные (релейные) регуляторы Позиционные регуляторы бывают: - 2-хпозиционные; - 3-хпозиционные; - многопозиционные; Двухпозиционным называется регулятор, в котором в зависимости от значения регулируемого параметра регулирующий орган может занимать только два фиксированных положения: открыто или закрыто, (включено или выключено). Закон регулирования двухпозиционного регулятора: µ=1 при G < GЗД (включено); µ=0 при G > GЗД (отключено). Переходной процесс регулирования – изменение регулируемого параметра во времени в процессе регулирования. Вид переходного процесса двухпозиционного регулирования представлено ниже: а) двухпозиционное регулирование без зоны нечувствительности; б) двухпозиционное регулирование с зоной нечувствительности а)
б ) Закон регулирования двухпозиционного регулятора с зоной нечувствительности: µ = 1 при G< GЗД + ∆ /2; µ = 0 при G> GЗД - ∆ /2.
(G – значение регулируемого параметра; GЗД – заданное значение регулируемого параметра; μ – положение регулирующего органа.) Двухпозиционные регуляторы с зоной нечувствительности (неоднозначности) имеют единственный параметр настройки − величину зоны нечувствительности ∆. С увеличением зоны нечувствительности качество регулирования ухудшается, но уменьшается число срабатывания аппаратуры. Под качеством регулирования понимают величину отклонения регулируемого параметра от заданного значения GЗД. Трехпозиционные регуляторы. Трехпозиционным называется регулятор, у которого в зависимости от значения регулируемого параметра регулирующий орган может занимать помимо двух крайних положений еще одно среднее положение. Закон регулирования трехпозиционного регулятора: μ = 1 при G< (GЗД - ∆ /2); μ = 0, 5 при (GЗД - ∆ /2)< G < (GЗД +∆ /2); μ = 0 при G> (GЗД + ∆ /2); Трехпозиционные регуляторы имеют существенное преимущество по сравнению с двухпозиционными регуляторами. Если при значении μ СР можно установить равенство притока и оттока вещества или энергии в объекте, т.е. при µСР QПР = QРАСХ, то значение регулируемого параметра G практически не будет изменяться, т.е. будет находиться вблизи заданного значения GЗД Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 3584; Нарушение авторского права страницы


 ,
,  - скорость перемещения регулирующего органа,
- скорость перемещения регулирующего органа, 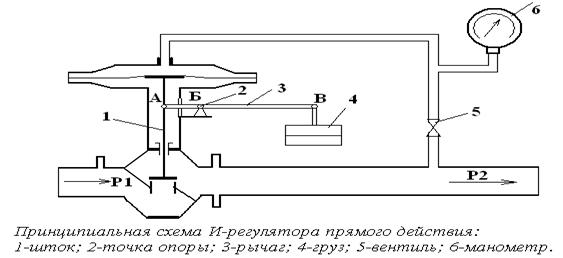
 ,
,  - пропорциональная,
- пропорциональная,  - интегральная,
- интегральная,  - дифференциальная составляющие.
- дифференциальная составляющие.

 ;
;  ;
;  .
.
 Р2, то есть давление в камере В больше чем в камере Б, результирующая сила будет направлена вниз, и мембранный блок опустится. Сопло в камере А при этом закроется и перекроет линию выхода воздуха в атмосферу, а сопло в камере Г откроется, и воздух питания, поступая в камеры А и Г, сформирует на выходе элемента сравнения сигнал 1.
Р2, то есть давление в камере В больше чем в камере Б, результирующая сила будет направлена вниз, и мембранный блок опустится. Сопло в камере А при этом закроется и перекроет линию выхода воздуха в атмосферу, а сопло в камере Г откроется, и воздух питания, поступая в камеры А и Г, сформирует на выходе элемента сравнения сигнал 1. }
} }
}
 – площадь мембраны, с – жесткость.
– площадь мембраны, с – жесткость. ,
,  Односедельный РО
Односедельный РО 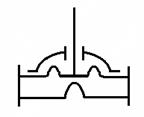 При увеличении управляющего сигнала шток перемещается вниз и уменьшает щель для прохода регулируемой среды. В данной конструкции отсутствует сальник, что существенно снижает гистерезис.
При увеличении управляющего сигнала шток перемещается вниз и уменьшает щель для прохода регулируемой среды. В данной конструкции отсутствует сальник, что существенно снижает гистерезис.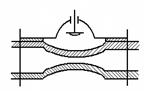 Расходная характеристика РО представляет собой зависимость величины расхода среды проходящий через клапан от степени его открытия.
Расходная характеристика РО представляет собой зависимость величины расхода среды проходящий через клапан от степени его открытия.