|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Пропорциональные (статические) регуляторы.
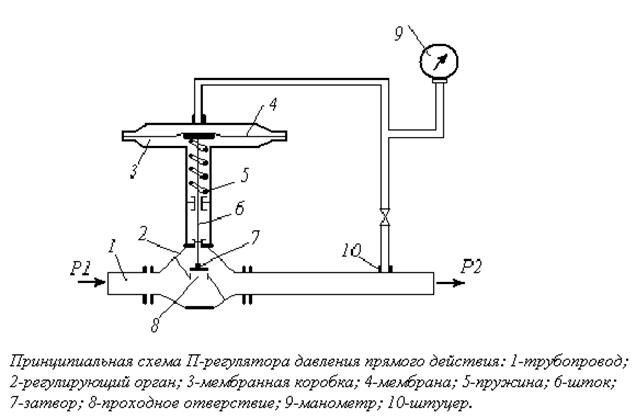
Пропорциональными (П-регуляторами) или статическими называются регуляторы, в которых перемещение регулирующего органа μ пропорционально величине отклонения регулируемого параметра от заданного значения. -µ=S*G, где µ − перемещение регулирующего органа; G − изменение регулируемого параметра; S − коэффициент пропорциональности; Чем на большую величину отклоняется регулируемый параметр от заданного значения, тем на большую величину переместится регулирующий клапан. П-регуляторы могут регулировать параметры в пределах зоны регулирования D.
В пропорциональном регуляторе каждому значению регулируемого параметра соответствует свое строго определенное положение регулирующего органа: G1− µ1; G2− µ2; Поэтому такие регуляторы называются еще регуляторами с отрицательной жесткой обратной связью.
При D=200% изменения параметра G на 10% вызовет перемещения регулирующего органа на μ =5%. Из-за наличия жесткой обратной связи пропорциональные регуляторы не способны поддерживать регулируемый параметр на точно заданном значении. У пропорциональных регуляторов всегда есть остаточное отклонение регулируемого параметра от заданного значения или статическая ошибка регулирования. Коэффициент пропорциональности S связан с пределом пропорциональности D выражением: S=1/D*100%, Где S - в долях единиц, D - в %. Предел пропорциональности D – изменение регулируемого параметра, выраженное в %, соответствующее полному перемещению регулирующего органа от «открыто» до «закрыто». Закон П-регулятора записывают в виде: -µ=1/D *G+µ0, где µ0 – начальное положение регулирующего органа. Знак «-» обозначает обратное действие (когда уровень G увеличивается, то μ уменьшается, т.е. клапан прикрывается). Предел пропорциональности D является единственным параметром настройки П-регулятора. В промышленных регуляторах D изменяется от 5 до 3000%. П-регуляторы на возмущение регулируют практически мгновенно, то есть обладают хорошим быстродействием. Динамическая характеристика пропорционального регулятора
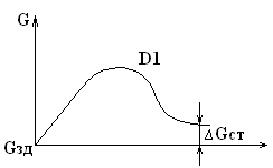
Если на регулятор нанести ступенчатое возмущение, то регулирующий орган перемещается практически мгновенно на величину ∆ μ – это свидетельствует о том, что П-регуляторы обладают высоким быстродействием. Чем меньше настраиваемый параметр регулятора D (предел пропорциональности), тем более колебательным будет переходной процесс и тем меньше по величине будет статическая ошибка регулирования ∆ Gст.
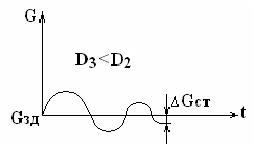
Переходной процесс регулирования D1=200%, s=0, 5; D2=100%, s=1; D3=40%, s=2, 5;
Апериодический переходной процесс
Переходной процесс с 20%-м перерегулированием
Колебательный затухающий переходной процесс
С понижением предела пропорциональности D колебания переходного процесса увеличиваются и увеличивается соответственно время регулирования. При D< 5% П-регулятор превращается в двухпозиционный. Недостаток П-регулятора: наличие статической ошибки регулирования ∆ Gст. Достоинства: 1. Высокое быстродействие 2. Дает устойчивое АСР со статическими или астатическими объектами. Интегральные (астатические) регуляторы
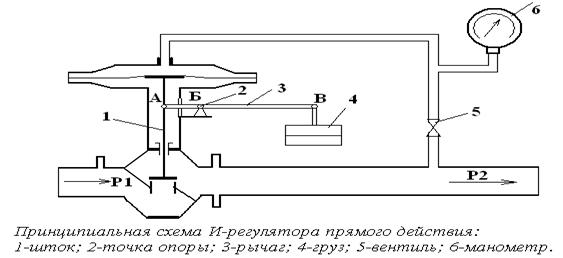
Интегральными (И-регуляторами) – называют регуляторы, у которых скорость перемещения регулирующего органа пропорциональна величине отклонения регулируемого параметра от заданного значения. Закон интегрального регулятора в дифференциальной форме:
где S1 – коэффициент пропорциональности, S1=1/TS, где TS – время перемещения регулирующего органа. Чем на большую величину отклоняется регулируемый параметр от заданного значения, тем быстрее будет перемещаться регулирующий клапан. Схема И-регулятора прямого действия
Закон регулирования И-регулятора в интегральной форме:
Ts-время перемещения регулирующего органа, является единственным параметром настройки И-регулятора. Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 1995; Нарушение авторского права страницы
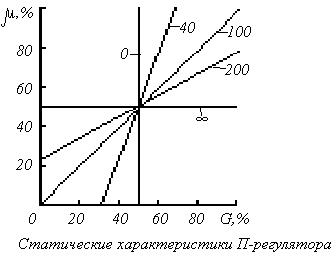 Статическая характеристика пропорционального регулятора
Статическая характеристика пропорционального регулятора 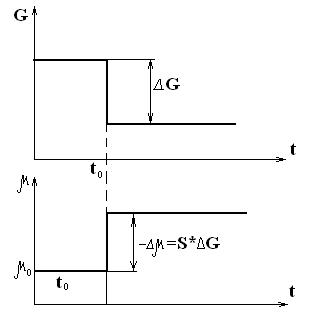

 ,
,  - скорость перемещения регулирующего органа,
- скорость перемещения регулирующего органа,