|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
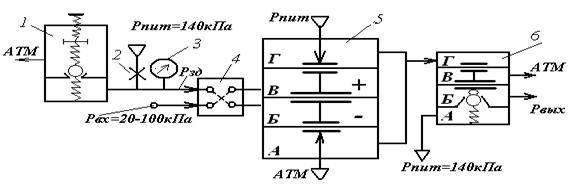
Пневматические позиционные регуляторы ⇐ ПредыдущаяСтр 5 из 5
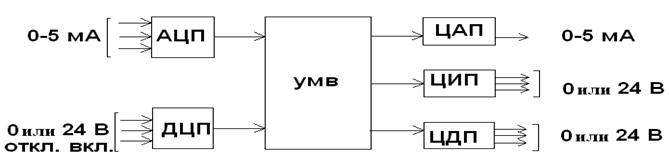
1-ручной задатчик; 2-постоянный дроссель; 3-манометр для показания заданного давления; 4-переключатель; 5-трехмембранный элемент сравнения; 6-пневматический усилитель. РЗД - заданное давление, устанавливается с помощью рукоятки на задатчике. РЗД подается в камеру В, а РВХ - измеренное давление, пропорциональное регулируемому параметру, подается в камеру Б. 1) Если РВХ < РЗД, РВЫХ = 1, (100 кПа÷ 140 кПа) 2) Если РВХ > РЗД, РВЫХ = 0 Этот регулятор отрабатывает двухпозиционный закон регулирования без зоны чувствительности. Регулирующий клапан может занимать 2 фиксированных положения «открыто», «закрыто». Электронные автоматические регуляторы Достоинства: 1. Удобный вид питания; 2. Высокое быстродействие электронных регуляторов; 3. Передача управляющих воздействий осуществляется на большие расстояния. Недостатки: 1. Пожаро-взрывоопасность электрических устройств; 2. Конструктивно сложнее, чем пневматические регуляторы и дороже. Электронные регуляторы выполняются в виде отдельных блоков, которые используются для монтажа локальных автоматических систем регулирования. Электронные регуляторы используют стандартные электрические сигналы (входные и выходные). Аналоговые сигналы: постоянного тока (0÷ 5мА; 4÷ 20мА); напряжение постоянного тока (0÷ 10мВ; 0÷ 100мВ; 0÷ 10В). Дискретные сигналы. Логический ноль при 0÷ 3В, логическая единица при 18÷ 30В (обычно постоянное напряжение 24 В). В настоящее время блочные электронные регуляторы вытесняются микропроцессорными контроллерами, они более удобны в эксплуатации. Один микропроцессорный контроллер может заменить до 100 локальных регуляторов. Программируемые микропроцессорные контроллеры Они предназначены для создания автоматических систем непрерывного и дискретного действия. Системы управления, построенные на микропроцессорной технике, реализуются путем программирования. В настоящее время промышленность выпускает следующие виды микропроцессорной техники: -РЕМИКОНТ – регулирующий микропроцессорный контроллер; -ЛОМИКОНТ – логический микропроцессорный контроллер; -ДИМИКОНТ – дисплейный микропроцессорный контроллер (используется в комплекте с РЕМИКОНТом или с ЛОМИКОНТом для удобства управления и обслуживания); -УНИКОНТ – универсальный микропроцессорный контроллер. Устройство связи с объектом управления. Предназначены для ввода и вывода информации от вычислительного устройства. Для ввода информации используются аналогово-цифровые преобразователи (АЦП) и дискретно-цифровые преобразователи (ДЦП).
Для вывода информации используются: - цифроаналоговые преобразователи (ЦАП) – преобразует цифровой код от ЭВМ в аналоговый стандартный сигнал. - цифро-импульсные преобразователи (ЦИП) – предназначены для преобразования цифрового кода в импульсный сигнал. Они используются для создания импульсных автоматических систем регулирования. - цифро-дискретные преобразователи (ЦДП) – предназначены для преобразования цифрового кода в дискретный сигнал. АЦП – используется для преобразования аналогового сигнала в цифровой код. Обычно имеет 16-ти канальный мультиплексор (коммутатор), который поочередно подключает к АЦП 16 измерительных преобразователей. ДЦП – воспринимает до 16 дискретных сигналов и преобразует их в цифровой код. Модули ЦДП и ЦИП имеют соответственно по 16 каналов преобразования. ЦАП является 8-ми канальным устройством. Каждый канал работает автономно. В микропроцессорных устройствах используются следующие виды сигналов: а) сигналы постоянного тока: 0-5 мА, 0-20 мА, 4-20 мА – основной сигнал. б) сигналы постоянного тока по напряжению: 0-10 В, 0-10 мВ, 0-100 мВ, 0-1 В. в) дискретный стандартный сигнал: - логический 0 соответствует 0 - 3 В (помехи в виде напряжения); - логическая 1 соответствует 18 - 30 В, (обычно 24 В). Информация обрабатывается в реальном масштабе времени и обновляется один раз за цикл. В течении цикла выходной сигнал УВМ не изменяется. Время цикла устанавливается оператором при настройке РЕМИКОНТА. Время цикла может иметь такие значения 0, 27 сек., 0, 51 сек., 1, 02 сек., 2, 04 сек. Чем больше реализовано каналов управления, тем больше время цикла устанавливается. Исполнительные устройства Выполняют команды регуляторов. Исполнительные устройства (ИУ) включают два основных элемента: 1) регулирующий орган; 2) исполнительный механизм (ИМ) Они предназначены для непосредственного показания управляющих воздействий на объект управления. Сигналы управляющих воздействий на ИМ подаются от автоматических регуляторов или от управляющей вычислительной машины УВМ. Классификация ИМ : 1. электрические; 2. пневматические; 3. гидравлические; 4. электропневматические; 5. электрогидравлические; 6. пневмогидравлические. По конструкции регулирующего органа: 1. заслоночные; 2. шаровые; 3. шланговые; 4. диафрагмовые; 5. односедельные; 6. двухседельные; 7. трехходовые. По способу действия: 1. нормально открытый; закрытый клапан (входящий закрыт); 2. нормально закрытый; клапан открыт (в_ходящий открыт). По функциональному назначению: 1. регулирующие; 2. запорные; 3. комбинирующие. Регулирующий орган плавно изменяет расход среды в зависимости от полученного управляющего сигнала. Запорные клапаныиспользуют для позиционного регулирования, имеют 2 положения: «открыт» – «закрыт». По расходной характеристике: 1. линейная характеристика; 2. логарифмическая характеристика; 3. специальная расходная характеристика (нелинейная). По конструкции исполнения: 1. обыкновенные; 2. пожаро- и взрывобезопасные.
Электрические ИМ Электрические ИМ включают в себя: 1. электродвигатель с редуктором в качестве ИМ; 2. регулирующий орган, который механически связан с редуктором. Используются исполнительные устройства с соленоидом в качестве ИМ. Такие ИУ используются для позиционирующего регулирования, т.е. они имеют два положения: «открыт» – «закрыт» (например, подано на соленоид напряжение или отсутствует). Для непрерывного регулирования используются регулирующие органы с электродвигателем в качестве ИМ. Для управления ИМ (электродвигателями) необходимо предусмотреть магнитные пускатели. Используются обычно бесконтактные магнитные пускатели, которые управляются дискретным сигналом от регулятора или УВМ (0÷ 24В). Могут использоваться одно или трехфазные электродвигатели.
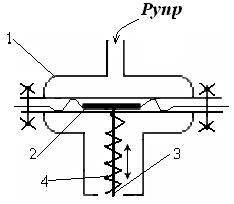
Пневматические ИМ (ПИМ) Используются ПИМ 2-х видов: · мембранные; · поршневые. Мембранный
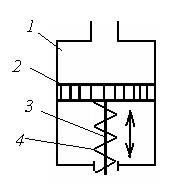
1 – корпус; 2 – вялая мембрана с жестким центром; 3 – шток; 4 – пружина. Поршневой
1 – цилиндр; 2 – поршень; 3 – шток; 4 – пружина. Популярное:
|
Последнее изменение этой страницы: 2017-03-03; Просмотров: 660; Нарушение авторского права страницы