
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Суммарная инерционная девиация
На практике в двухгироскопных компасах, снабженных гидравлическим успокоителем колебаний, обе рассмотренные девиации существуют одновременно, складываясь в общую суммарную инерционную девиацию. Величина этой девиации зависит от параметров ГК, широты места судна, значения расчетной широты и параметров маневра. Аналитические зависимости, описывающие закон изменения рассматриваемой девиации достаточно громоздки и практически неприемлемы для оценки ее текущего значения вахтенным помощником капитана без привлечения вычислительной техники и информации о параметрах маневра. Однако ему необходимо иметь представление об особенностях проявления указанной девиации и, если в ГК отсутствуют устройства для ее компенсации, уметь снизить ее негативное влияние до минимума.
· Значение первого максимума девиации сильно зависит от широты места маневра. Указанное значение уменьшается по мере приближения широты места судна к расчетной. В расчетной широте девиация меняет свой знак и в сильной степени возрастает в широтах, которые выше расчетной; · В диапазоне широт от φ =0° до φ *=60° значение первого максимума девиации в значительной степени зависит от продолжительности маневра. · Чем маневр длительнее, тем меньше значение первого максимума. В диапазоне широт, лежащих выше расчетной, значение первого максимума девиации практически не зависит от продолжительности маневра. · С увеличением широты места маневра в диапазоне широт от φ =0° до φ *=60° знак первого максимума девиации остается неизменным. В расчетной широте φ * и выше знак первого максимума меняется на противоположный. · Нарастание значения девиации в течение времени маневра от 0 до момента t1 его окончания происходит практически по линейному закону. · Значение второго максимума девиации в любой широте места маневра практически не зависит от его длительности. · Значение второго максимума девиации в диапазоне широт от φ =0° до φ < φ * практически не зависит от широты места. В диапазоне широт выше расчетной значение второго максимума в сильной степени возрастает с увеличением широты места. · Возможен перерасчет значения девиации для случая равноускоренного движения на иное значение ускорения, чем принятое для расчета графиков, аналогичных приведенным на рис. 2.16, но только для какого-либо одного из фиксированных значений длительности маневра. Для перерасчета можно использовать следующую формулу:
Особого внимания заслуживает рассмотрение влияния повторных маневров на показания гирокомпаса. Как и в предыдущем случае, затрагивая эту тему, воспользуемся хорошо изложенным материалом, касающимся данного вопроса, в учебнике [13]. Существенное значение при анализе влияния повторных маневров на величину суммарной инерционной девиации имеет явление «наследственности» колебаний гирокомпаса, открытое акад. А. Н. Крыловым (1863—1945). Суть этого явления состоит в следующем. Если судно совершает ряд маневров, следующих один за другим через интервалы времени, меньшие, чем это необходимо для того, чтобы девиация Наибольший интерес здесь представляют следующие задачи: § При каком характере повторных маневров, и при какой их последовательности во времени результирующая девиация вследствие явления «наследственности» колебаний гирокомпаса, накапливаясь, достигает максимально возможных значений § Каково максимально возможное значение результирующей девиации Анализ показывает, что возможна такая последовательность маневров, при которой в результате «наследственности» колебаний гирокомпаса инерционные девиации накапливаются в такой степени, что могут достичь значения, в 2—2, 5 раза большего того, которое может иметь место при однократном маневре. На основании логических рассуждении можно прийти к мысли, что это произойдет при маневрировании вдоль меридиана и в том случае, если маневры совершаются через промежутки времени, приблизительно равные половине периода затухающих колебаний гирокомпаса в данной широте места. Действительно, при указанных условиях «пиковые» значения девиаций суммируются.
Если немного раньше этого момента (отмечено стрелкой) сделать повторный маневр, также представляющий собой правую полуциркуляцию, но с курса 0° на курс 180°, то график 2 девиации от этого маневра будет зеркальным отображением графика девиации после первого маневра, только сдвинутым вперед по времени примерно на 58 мин. Взаимное расположение кривых 1 и 2 позволяет сделать вывод, что остаточное значение девиации от первого маневра налагается на девиацию от второго маневра таким образом, что происходит максимально возможное ее накопление. Аналогичные рассуждения можно продолжить применительно к третьему маневру (вновь поворот с курса 180° на курс 0°). Его начало также отмечено стрелкой (график девиации 3).
Для количественной оценки максимально возможной девиации, которая может накопиться в результате повторных маневров судна, рассчитан график, приведенный на рис. 2.19. Этот график построен
В современных гирокомпасах особенно тех, которые работают в составе интегрированных навигационных комплексов, осуществляется компенсация суммарной инерционной девиации, как правило, совместно со скоростной девиацией. Для этого производится их аналитическая оценка на основании информации о параметрах движения судна. Типовая схема гирокомпаса
Простейшая схема гирокомпаса с корректируемым чувствительным элементом представлена на рис. 3.1. В его основе лежит астатический гироскоп с тремя степенями свободы. Для того чтобы этот гироскоп приобрел способность устанавливаться в меридиан, он должен быть снабжен устройством, которое воздействовало бы на него так же, как воздействует на гиросферу двухгироскопного компаса ее маятниковость. Иными словами, при отклонении главной оси ох гироскопа от плоскости горизонта относительно оси оу внутренней рамки карданова подвеса должен создаваться момент, пропорциональный этому углу отклонения. Указанная задача решается контуром коррекции, включающим в себя акселерометр А, усилитель Уу, сумматор Су и датчик моментов ДМу. При отсутствии маневрирования судна, выходной сигнал акселерометра будет пропорциональным проекции ускорения силы тяжести Земли на направление его оси чувствительности. В силу того, что он устанавливается на внутренней рамке карданова подвеса таким образом, чтобы эта ось была параллельна главной оси гироскопа, выходной сигнал акселерометра будет пропорционален углу отклонения плоскости рамки, а, следовательно, и главной оси гироскопа от плоскости горизонта. В силу указанных обстоятельств этот прибор часто называют индикатором горизонта. Сигнал акселерометра после усиления в усилителе Уу поступает на датчик моментов ДМу, который прикладывает к гироскопу момент, пропорциональный напряжению, поступившему на него, которое, в свою очередь, пропорционально указанному выше углу отклонения главной оси гироскопа. Таким образом, создается модель физического маятника, присутствующего в двухгироскопном компасе. Следует отметить, что указанный способ создания маятникового момента обладает, как минимум, двумя существенными преимуществами перед физическим маятником. Так, при наличии ускорений, обусловленных качкой судна и его маневрированием, их влияние на работу гирокомпаса с неуравновешенным чувствительным элементом пропорционально той силе инерции, приложенной к его центру массы, которую они порождают. В результате имеет место практически линейная зависимость 1 (рис. 3.2) между моментами сил инерции, приложенными к гироскопу, и указанными уско Второе преимущество указанной системы коррекции состоит в том, что на время маневра судна, когда влияние вредных ускорений достаточно ощутимо, особенно если речь идет о высокоскоростных судах, имеется возможность полного отключения коррекции. Для обеспечения демпфирования прецессионных колебаний гироскопа в процессе его установления в меридиан имеется второй контур коррекции, включающий в себя акселерометр А, усилитель Уz, датчик моментов ДМz. Этот контур создает относительно оси оz наружной рамки подвеса момент, пропорциональный углу отклонения главной оси от плоскости горизонта. Приложенный момент вызывает прецессию оси гироскопа в сторону плоскости горизонта, в результате чего и обеспечивается требуемое затухание. Наряду с указанным выше, рассматриваемая схема гирокомпаса допускает создание внешних корректирующих сигналов Uky и Ukz, которые используются для устранения систематических ошибок гирокомпаса как методических, так и инструментальных. Съем информации о курсе судна осуществляется датчиком курса ДК. Следует отметить, что приведенная схема корректируемого гирокомпаса является предельно упрощенной, но позволяющей корректно выявить основные его свойства. Все необходимые уточнения будут рассмотрены ниже на моделях гирокомпасов, более близких к реальным изделиям. Уравнения движения чувствительного элемента гирокомпаса Как и ранее, для выяснения основных свойств гирокомпаса рассматриваемого типа составим уравнения, описывающие движение его чувствительного элемента. Для этого обратимся к зависимостям (2.20 [56]), описывающим поведение гироскопа с тремя степенями свободы на подвижном основании при воздействии на него внешних возмущающих моментов Мх и Му. Учитывая незначительное влияние нутационных колебаний на работу гирокомпаса, опустим из рассмотрения первые слагаемые этих зависимостей, определяющие указанные колебания. В результате названные выражения примут вид:
Подставим в эти уравнения выражения (2.38 [56]), определяющие угловые скорости движения основания гирокомпаса. В результате получим:
Если считать гироскоп с технологической точки зрения идеальным, т.е. не имеющим инструментальных погрешностей, то моменты Мх и Му будут создаваться только датчиками моментов ДМу и ДМz. Величина этих моментов пропорциональна напряжениям, поступающим на них, а знак выбирается таким, чтобы движение гироскопа было устойчивым. Учитывая это можно записать:
Учитывая, что
Это позволяет последние уравнения переписать в более простой форме:
Объединяя зависимости (3.8) и (4.7), запишем искомые уравнения корректируемого гирокомпаса в окончательном виде:
Используя полученные уравнения, проведем исследование основных особенностей поведения чувствительного элемента рассматриваемого гирокомпаса. Как и ранее, в начале проанализируем работу гирокомпаса на судне, движущемся с постоянной скоростью. Популярное: |
Последнее изменение этой страницы: 2017-03-08; Просмотров: 644; Нарушение авторского права страницы
 На рис. 2.16 приведены кривые, рассчитанные на ЭВМ для параметров, соответствующих гирокомпасу “Курс-4”, которые характеризуют закон изменения суммарной инерционной девиации при равноускоренных маневрах длительностью 60 и 360 секунд, произведенных в различных широтах. Равноускоренное движение представляло собой набор скорости от нуля до 25 узлов при неизменном курсе судна, равном 1800. Указанные кривые и основные выводы, полученные в результате их анализа, заимствованы из учебника [13]. Несмотря на то, что эти кривые приведены для сугубо частных случаев движения судна, результаты их анализа, носят достаточно общий характер и могут быть использованы в большинстве практических случаев. Всего на упомянутом рисунке представлены: четыре графика суммарной инерционной девиации, определяющие закон ее изменения во времени при манерах в широтах ниже расчетной; два графика для расчетной широты, равной 600; и два графика для широт, которые выше расчетной. Сравнивая эти графики между собой можно придти к следующим выводам:
На рис. 2.16 приведены кривые, рассчитанные на ЭВМ для параметров, соответствующих гирокомпасу “Курс-4”, которые характеризуют закон изменения суммарной инерционной девиации при равноускоренных маневрах длительностью 60 и 360 секунд, произведенных в различных широтах. Равноускоренное движение представляло собой набор скорости от нуля до 25 узлов при неизменном курсе судна, равном 1800. Указанные кривые и основные выводы, полученные в результате их анализа, заимствованы из учебника [13]. Несмотря на то, что эти кривые приведены для сугубо частных случаев движения судна, результаты их анализа, носят достаточно общий характер и могут быть использованы в большинстве практических случаев. Всего на упомянутом рисунке представлены: четыре графика суммарной инерционной девиации, определяющие закон ее изменения во времени при манерах в широтах ниже расчетной; два графика для расчетной широты, равной 600; и два графика для широт, которые выше расчетной. Сравнивая эти графики между собой можно придти к следующим выводам:  (2.46)
(2.46) - значение девиации, взятое на интересующий момент времени из имеющейся таблицы или графика, построенного для маневра, в результате которого северная составляющая скорости судна изменилась на величину
- значение девиации, взятое на интересующий момент времени из имеющейся таблицы или графика, построенного для маневра, в результате которого северная составляющая скорости судна изменилась на величину  ,
,  - изменение северной составляющей скорости судна в результате проведенного вами маневра.
- изменение северной составляющей скорости судна в результате проведенного вами маневра. от каждого предыдущего маневра практически исчезла до начала следующего, то чувствительный элемент гирокомпаса как бы «запоминает» девиацию от каждого отдельного маневра и полностью ее воспроизводит во времени одновременно и независимо от девиаций, возникающих под действием других маневров. Вследствие этого результирующая девиация представляет собой итог наложения всех составляющих
от каждого предыдущего маневра практически исчезла до начала следующего, то чувствительный элемент гирокомпаса как бы «запоминает» девиацию от каждого отдельного маневра и полностью ее воспроизводит во времени одновременно и независимо от девиаций, возникающих под действием других маневров. Вследствие этого результирующая девиация представляет собой итог наложения всех составляющих  ?
? 
 Суммарный график девиации, полученной в результате трех маневров, приведен на рис. 2.18. Поскольку девиация, возникающая после первого маневра, постепенно затухает, после некоторого числа маневров (практически трех-четырех) максимум результирующей девиации
Суммарный график девиации, полученной в результате трех маневров, приведен на рис. 2.18. Поскольку девиация, возникающая после первого маневра, постепенно затухает, после некоторого числа маневров (практически трех-четырех) максимум результирующей девиации достигнет наибольшего возможного
достигнет наибольшего возможного  =25 уз (первый маневр) и дает немного завышенное значение величины
=25 уз (первый маневр) и дает немного завышенное значение величины  (2.47)
(2.47) - значение девиации, взятое из графика на рис. 2.18,
- значение девиации, взятое из графика на рис. 2.18, 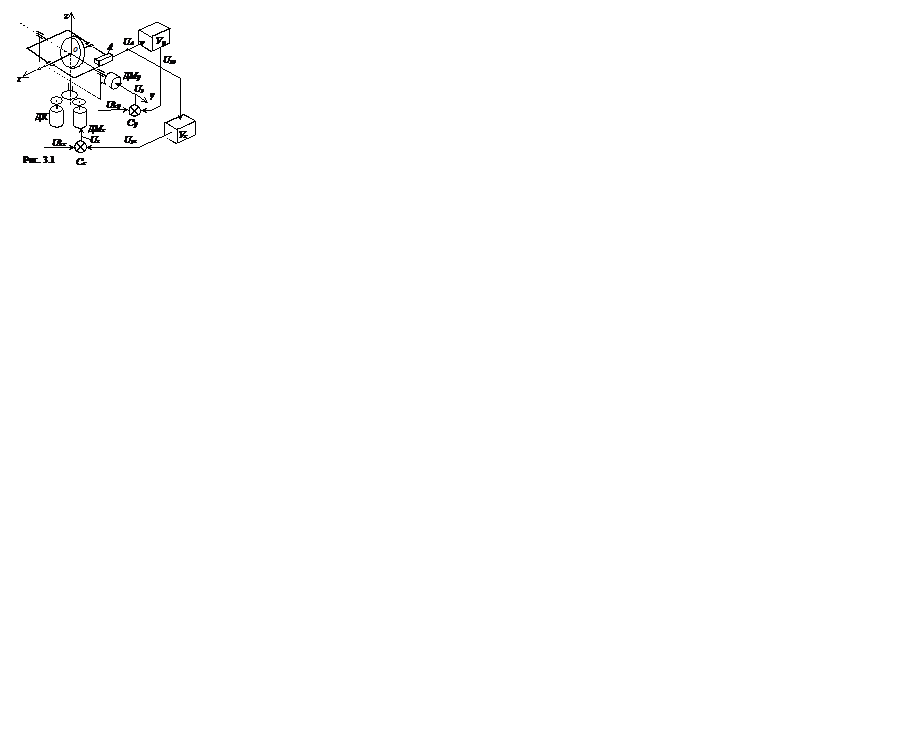 Двухгироскопные компасы, сочетая в себе такие качества, как относительно низкая стоимость изделий и высокая надежность, имеют один существенный недостаток, заключающийся в отсутствии возможности коррекции параметров движения и положения гиросферы. От этого недостатка свободны рассматриваемые гирокомпасы, поскольку здесь оператор имеет возможность прикладывать специально сформированные управляющие моменты непосредственно к его чувствительному элементу. Указанная возможность сделала приборы рассматриваемого типа весьма перспективными, открывающими дорогу для интенсивного использования новейших достижений электроники и вычислительной техники с целью наиболее полного удовлетворения требований практики.
Двухгироскопные компасы, сочетая в себе такие качества, как относительно низкая стоимость изделий и высокая надежность, имеют один существенный недостаток, заключающийся в отсутствии возможности коррекции параметров движения и положения гиросферы. От этого недостатка свободны рассматриваемые гирокомпасы, поскольку здесь оператор имеет возможность прикладывать специально сформированные управляющие моменты непосредственно к его чувствительному элементу. Указанная возможность сделала приборы рассматриваемого типа весьма перспективными, открывающими дорогу для интенсивного использования новейших достижений электроники и вычислительной техники с целью наиболее полного удовлетворения требований практики. рениями. При использовании акселерометра, имеющего характеристику 2, котораялинейна только в диапазоне относительно небольших значений ускорений, соизмеримых с величиной
рениями. При использовании акселерометра, имеющего характеристику 2, котораялинейна только в диапазоне относительно небольших значений ускорений, соизмеримых с величиной  , где
, где  - максимально возможное отклонение главной оси гироскопа от плоскости горизонта, g – ускорение силы тяжести, степень влияния вредных ускорений будет существенно снижена.
- максимально возможное отклонение главной оси гироскопа от плоскости горизонта, g – ускорение силы тяжести, степень влияния вредных ускорений будет существенно снижена. (3.1)
(3.1) (3.2)
(3.2) (3.3)
(3.3) (3.4)
(3.4) (3.5)
(3.5) (3.6)
(3.6) > >
> >  . (3.7)
. (3.7) (3.8) Как видим, полученные уравнения содержат неизвестную UA, которая должна быть дополнительно определена. Это можно сделать, воспользовавшись уравнением (4.7 [56]) акселерометра, установленного на внутренней рамке карданова подвеса.
(3.8) Как видим, полученные уравнения содержат неизвестную UA, которая должна быть дополнительно определена. Это можно сделать, воспользовавшись уравнением (4.7 [56]) акселерометра, установленного на внутренней рамке карданова подвеса.