
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
What is the NMEA 0183 Standard?
The National Marine Electronics Association (NMEA) is a non-profit association of manufacturers, distributors, dealers, educational institutions, and others interested in peripheral marine electronics occupations. The NMEA 0183 standard defines an electrical interface and data protocol for communications between marine instrumentation. NMEA 0183 is a voluntary industry standard, first released in March of 1983. It has been updated from time to time; the latest release, currently (August 2001) Version 3.0, July 2001, is available from the NMEA office (Warning: the price for non-members is 250 US$). P O Box 3435 New Bern NC 28564-3435 USA www.nmea.org NMEA has also established a working group to develop a new standard for data communications among shipboard electronic devices. The new standard, NMEA 2000, is a bi-directional, multi-transmitter, multi-receiver serial data network. It is multi-master and self-configuring, and there is no central controller. The NMEA began a beta testing period in January 2000 with eleven manufacturers. A release version of NMEA 2000 is expected in 2001. Electrical Interface NMEA 0183 devices are designated as either talkers or listeners (with some devices being both), employing an asynchronous serial interface with the following parameters: Baud rate: 4800 Number of data bits: 8 (bit 7 is 0) Stop bits: 1 (or more) Parity: none Handshake: none NMEA 0183 allows a single talker and several listeners on one circuit. The recommended interconnect wiring is a shielded twisted pair, with the shield grounded only at the talker. The standard dos not specify the use of a particular connector. Note: The new 0183-HS standard (HS = high speed) introduced in version 3.0 uses a 3-wire interface and a baud rate of 38400. This type of interface is not discussed here. Its is recommended that the talker output comply with EIA RS-422, a differential system with two signal lines, " A" and " B". Differential drive signals have no reference to ground and are more immune to noise. However, a single-ended line at TTL level is accepted as well. The voltages on the A line correspond to those on the TTL single wire, while the B voltages are inverted (when output A is at +5 V, output B is at 0 V, and vice versa. This is the unipolar RS-422 operation. In bipolar mode ±5 V are used). In either case, the recommended receive circuit uses an opto-isolator with suitable protection circuitry. The input should be isolated from the receiver's ground. In practice, the single wire, or the RS-422 " A" wire may be directly connected to a computer's RS-232 input. In fact even many of the latest products, like hand-held GPS receivers, do not have a RS-422 differential output, but just a single line with TTL or 5 V CMOS compatible signal level. General Sentence Format All data is transmitted in the form of sentences. Only printable ASCII characters are allowed, plus CR (carriage return) and LF (line feed). Each sentence starts with a " $" sign and ends with < CR> < LF>. There are three basic kinds of sentences: talker sentences, proprietary sentences and query sentences. Talker Sentences. The general format for a talker sentence is: $ttsss, d1, d2,....< CR> < LF> The first two letters following the „$” are the talker identifier. The next three characters (sss) are the sentence identifier, followed by a number of data fields separated by commas, followed by an optional checksum, and terminated by carriage return/line feed. The data fields are uniquely defined for each sentence type. An example talker sentence is: $HCHDM, 238, M< CR> < LF> where " HC" specifies the talker as being a magnetic compass, the " HDM" specifies the magnetic heading message follows. The " 238" is the heading value, and " M" designates the heading value as magnetic. A sentence may contain up to 80 characters plus " $" and CR/LF. If data for a field is not available, the field is omitted, but the delimiting commas are still sent, with no space between them. The checksum field consists of a " *" and two hex digits representing the exclusive OR of all characters between, but not including, the " $" and " *". Proprietary Sentences. The standard allows individual manufacturers to define proprietary sentence formats. These sentences start with " $P", then a 3 letter manufacturer ID, followed by whatever data the manufacturer wishes, following the general format of the standard sentences. Some proprietary sentences, mainly from Garmin, Inc., are listed in chapter 6. The NMEA 0183 Protocol 2 Query sentences. A query sentence is a means for a listener to request a particular sentence from a talker. The general format is: $ttllQ, sss, [CR][LF] The first two characters of the address field are the talker identifier of the requester and the next two characters are the talker identifier of the device being queried (listener). The fifth character is always a " Q" defining the message as a query. The next field (sss) contains the three letter mnemonic of the sentence being requested. An example query sentence is: $CCGPQ, GGA< CR> < LF> where the " CC" device (computer) is requesting from the " GP" device (a GPS unit) the " GGA" sentence. The GPS will then transmit this sentence once per second until a different query is requested. Talker Identifiers AG Autopilot - General AP Autopilot - Magnetic CD Communications – Digital Selective Calling (DSC) CR Communications – Receiver / Beacon Receiver CS Communications – Satellite CT Communications – Radio-Telephone (MF/HF) CV Communications – Radio-Telephone (VHF) CX Communications – Scanning Receiver DF Direction Finder EC Electronic Chart Display & Information System (ECDIS) EP Emergency Position Indicating Beacon (EPIRB) ER Engine Room Monitoring Systems GP Global Positioning System (GPS) HC Heading – Magnetic Compass HE Heading – North Seeking Gyro HN Heading – Non North Seeking Gyro II Integrated Instrumentation IN Integrated Navigation LC Loran C P Proprietary Code RA RADAR and/or ARPA SD Sounder, Depth SN Electronic Positioning System, other/general SS Sounder, Scanning TI Turn Rate Indicator VD Velocity Sensor, Doppler, other/general DM Velocity Sensor, Speed Log, Water, Magnetic VW Velocity Sensor, Speed Log, Water, Mechanical WI Weather Instruments YX Transducer ZA Timekeeper – Atomic Clock ZC Timekeeper – Chronometer ZQ Timekeeper – Quartz ZV Timekeeper – Radio Update, WWV or WWVH
Раздел 2.8. Гиротахометры (2 часа) Принцип действия гиротахометра
Составим уравнения, описывающие работу гиротахометра. Результирующую угловую скорость вращения основания прибора будем представлять ее составляющими ω х0, ω у0 и ω z0 по осям, связанным с судном. В общем случае к ротору гироскопа будут приложены следующие моменты (рис. 3.4): § момент Мг гироскопической реакции на внешние воздействия; § момент Ми сил инерции рамки и связанных с ней элементов, в частности ротора гироскопа; § момент Мд демпфирующих сил, порождаемых, в основном, демпфером Д; § момент Мпр упругих сил, порождаемый пружиной: § возмущающий момент (момент внешних сил) Мв. В соответствие с принципом Даламбера сумма указанных моментов относительно оси оу должна быть равна нулю. Найдем выражения для указанных моментов. Как известно, момент гироскопической реакции равен по модулю произведению кинетического момента гироскопа на составляющую абсолютной угловой скорости вращения его ротора вокруг оси oz:
Момент сил инерции ротора и рамки подвеса будет определяться угловыми ускорениями
Момент демпфирующих сил можно представить в следующем виде:
где kд – коэффициент демпфирования. Аналогично выглядит и выражение для момента упругих сил:
Момент внешних сил определяется трением Мт в опорах подвеса рамки гироскопа, а также воздействиями f(t), возникающими из-за конструктивного и технологического несовершенства прибора:
Используя полученные выражения, уравнения, описывающие закон изменения угла поворота рамки подвеса, можно записать в виде:
Если основание прибора вращается в пространстве только с угловой скоростью ω zo, а моменты сил трения в опорах подвеса и другие возмущающие моменты отсутствуют, то установившийся угол β у отклонения главной оси от положения равновесия будет определяться следующим выражением:
Полученное выражение показывает, что угол β , а, следовательно, и сигнал, снимаемый с потенциометра П (рис. 3.4), будут пропорциональны измеряемой угловой скорости ω zo. Однако факторы, опущенные в данном случае из рассмотрения, могут оказывать заметное влияние на точность показаний прибора. Так, влияние перекрестной составляющей ω х0 угловой скорости вращения основания прибора увеличивается с увеличением угла β прецессии гироскопа. Поэтому на практике стремятся этот угол сделать по возможности минимальным или свести его вообще к нулю. Стремятся снизить также величину момента сил сухого трения или исключить его полностью. Для этого используют различного рода подвесы ротора гироскопа. В частности, широкое применение находят двухстепенные гироскопы, использующие гидростатический (поплавковый) или воздушный подвес чувствительного элемента. В этих моделях с целью повышения точности работы прибора механическая пружина заменяется “электрической” (рис. 3.5), представляющей собой сочетание датчика угла ДУ, формирующего напряжение, пропорциональное β , усилителя У и датчика момента ДМ. Последний прикладывает к рамке гироскопа момент, пропорциональный углу ее отклонения β . Сигнал об измеренной угловой скорости снимается с усилителя У. Уравнения (3.6) можно представить и в ином виде [36]:
Как известно, выражение (3.10) позволяет не только оценить динамические характеристики исследуемого прибора, но широко используется при анализе работы различных систем автоматического управления, в которых применяются ГТ. |
Последнее изменение этой страницы: 2017-03-08; Просмотров: 489; Нарушение авторского права страницы
 Принципиальная схема простейшего гиротахометра (ГТ), построенного на гироскопе с двумя степенями свободы, представлена на рис. 3.4. Ротор гироскопа установлен в кольце К карданового подвеса. Поворот кольца вокруг оси оу0 ограничивается пружиной Пр, необходимой для создания восстанавливающего момента. Погашение собственных колебаний гироскопа осуществляется демпфером Д. Показания прибора, пропорциональные углу поворота кольца вокруг своей оси подвеса, снимаются в виде напряжения с потенциометра П. Оси ох0у0z0 связаны с судном, а оси охуz, совмещенные в начальном положении (при β =0) с осями ох0у0z0, - с рамкой прибора и в данном случае являются осями Резаля. Ось оz0 является осью чувствительности или входной осью, так как гиротахометр реагирует, в основном, на поворот судна вокруг этой оси; ось оу называется выходной, ввиду того, что снимаемый с потенциометра П сигнал пропорционален углу поворота (прецессии) кольца К вокруг этой оси. Эту ось также называют осью прецессии.
Принципиальная схема простейшего гиротахометра (ГТ), построенного на гироскопе с двумя степенями свободы, представлена на рис. 3.4. Ротор гироскопа установлен в кольце К карданового подвеса. Поворот кольца вокруг оси оу0 ограничивается пружиной Пр, необходимой для создания восстанавливающего момента. Погашение собственных колебаний гироскопа осуществляется демпфером Д. Показания прибора, пропорциональные углу поворота кольца вокруг своей оси подвеса, снимаются в виде напряжения с потенциометра П. Оси ох0у0z0 связаны с судном, а оси охуz, совмещенные в начальном положении (при β =0) с осями ох0у0z0, - с рамкой прибора и в данном случае являются осями Резаля. Ось оz0 является осью чувствительности или входной осью, так как гиротахометр реагирует, в основном, на поворот судна вокруг этой оси; ось оу называется выходной, ввиду того, что снимаемый с потенциометра П сигнал пропорционален углу поворота (прецессии) кольца К вокруг этой оси. Эту ось также называют осью прецессии. (3.1)
(3.1) вращения основания прибора и
вращения основания прибора и  прецессии гироскопа:
прецессии гироскопа:  (3.2)
(3.2) (3.3)
(3.3) (3.4)
(3.4) (3.5)
(3.5) (3.6)
(3.6) . (3.7)
. (3.7) (3.8)
(3.8) ,
,  ,
,  ,
,  . (3.9)
. (3.9)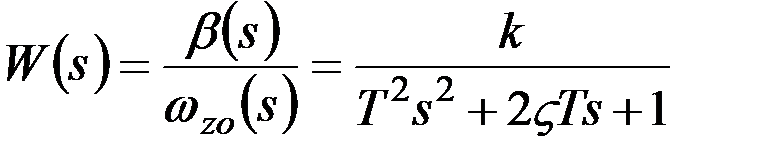 . (3.10)
. (3.10)