|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
РАЗРАБОТКА И ПРОВЕРКА РАБОТЫ СХЕМЫ
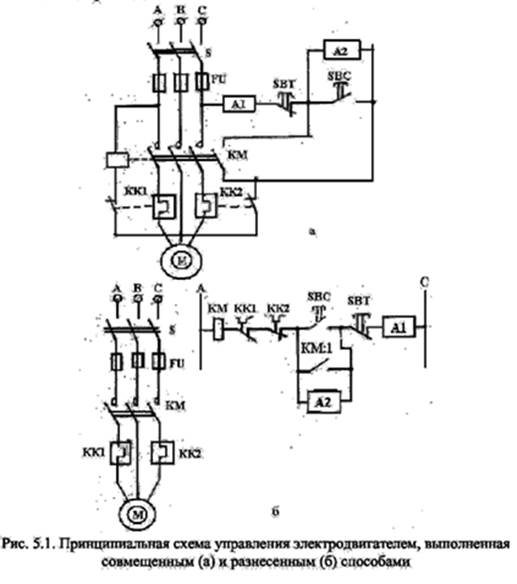
АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ Цель работы В промышленности, сельском хозяйстве и быту широко применяются простейшие схемы автоматизированного управления асинхронными короткозамкнутыми электродвигателями, обеспечивающие технологический процесс работы различных механизмов и устройств. Такие схемы обычно относят к схемам технологической автоматизации и обслуживаются персоналом электроцехов. В этой связи будущие инженеры -электроэнергетики должны уметь разрабатывать, и выполнять наладку схем автоматизированного управления электродвигателями. Цель работы состоит в изучении аппаратуры и принципов построения схем автоматизированного управления электродвигателями. Принципы построения схем управления Электродвигателями Схемы управления электродвигателями напряжением до 1000 В включают в себя оборудование силовой (первичной) цепи и цепи управления (вторичной цепи). Оборудование силовой цепи обеспечивает протекание рабочего тока электродвигателя. В большинстве случаев в силовой цепи электродвигателей последовательно по направлению энергии устанавливаются рубильники, плавкие предохранители либо автоматические воздушные выключатели, контакторы или пускатели (рис. 5.1). Рубильники предназначены для снятия напряжения со всей силовой цепи и цепи управления. Это позволяет осуществлять осмотр всего оборудования и его ремонт без напряжения.
Плавкие предохранители или автоматические воздушные выключатели осуществляют защиту электродвигателя и его электрооборудования от коротких замыканий и перегрузок. Они отключают одновременно все проводники, подходящие к двигателю. В отдельных случаях автоматические воздушные выключатели используются для нечастых включений и отключений электродвигателя. Контакторы и магнитные пускатели предназначены для дистанционного включения и отключения питания электродвигателя. Контакторы и магнитные пускатели предназначены для дистанционного включения и отключения электродвигателя. Оборудование вторичных цепей более разнообразно. Оно включает в себя различные аппараты, обеспечивающие управление коммутационным аппаратом (контактором, пускателем, автоматом), в цепи питания его электродвигателю Для ручного управления двигателями используются командоаппараты. Простейшие из них - выключатели и кнопки, которые замыкают и размыкают свои контакты под воздействием руки оператора. Для этой цели могут использоваться командоконтроллеры и ключи управления. Непосредственно аппаратурой, реализующей определенную программу управления двигателем, могут быть различные датчики (температуры, уровня жидкости, давления, скорости и т. д.), реле (промежуточные, времени, тока и др.), концевые выключатели и переключатели и т. д. Эти аппараты устанавливаются в электрической цепи управления коммутационным аппаратом с тем, чтобы обеспечить выполнение логической последовательности его включения, отключения или переключения в зависимости от положения датчиков. На рис. 5.1 приведена схема ручного управления электродвигателем. Схема выполнена совмещенным (а) и разнесенным (б) способами. На рис. 5.1, а показано оборудование силовой и вторичной цепей со всеми выполненными соединениями. При этом все приборы и аппараты изображены в собранном виде со всеми их обмотками и контактами. При разнесенном способе изображения (рис. 5.1, б) приборы и аппараты силовой и вторичной цепей расчленены на составные функциональные элементы и размещены на чертеже в порядке прохождения тока от полюса к полюсу. Схема при этом состоит из отдельных цепей, расположенных горизонтально или вертикально и имеющих определенное назначение. Этот широко распространенный способ выполнения вторичных цепей упрощает их составление и монтаж. В приведенной на рис. 5.1, б схеме все элементы управления (кнопки S1 и S2, контакты электротепловых реле KKI и КК2, катушка магнитного пускателя КМ) образуют одну цепь управления электродвигателем, включенную между фазами А и С сети, к которой подключен двигатель. Включение двигателя осуществляется нажатием кнопки S2. При этом создается путь для протекания тока через катушку магнитного пускателя КМ (замыкается цепь катушки пускателя), который включается и замыкает свои силовые и вспомогательный контакты КМ: 1. Последние шунтируют кнопку S2, что обеспечивает протекание тока через катушку пускателя после отпускания кнопки. Для отключения двигателя нажимается кнопка S1, размыкающая цепь катушки КМ. При этом контактор отключается и двигатель останавливается. При перегрузке двигателя срабатывают электротепловые реле KKI или КК2 и размыкают свои контакты. Магнитный пускатель при этом отключается. Показанная на рис. 5.1 схема управления электродвигателем кроме ручного управления может быть оснащена и устройством его автоматического управления. С этой целью в схему управления вводятся устройства А1 и А2. Устройство А1 предназначено для отключения электродвигателя при выполнении заданной программы. Устройство А2 обеспечивает автоматическое включение двигателя и его работу при срабатывании датчиков или логической схемы. Для управления двигателем, который должен вращаться по очередно в обе стороны - по часовой и против часовой стрелки, применяются реверсивные магнитные пускатели (рис. 5.2). Такой пускатель содержит 2 контактора (КМ1 и КМ2), объединенных в одном корпусе. Один контактор подает на двигатель напряжение с прямым чередованием фаз (А, В,: С), второй - с обратным (А, С, В). В зависимости от этого двигатель вращается по часовой или против часовой стрелки. Схема ручного управления реверсивным пускателем изображена на рис. 5.3. В схеме показана электромагнитная блокировка контакторов КМ1 и КМ2, исключающая одновременное включение обоих контакторов и устройства автоматического включения и отключения двигателя в соответствии с заданной программой. Схемы автоматизированного управления двигателями должны обеспечивать заданный режим работы механизма или машины и надежно работать во всех режимах технологического процесса. Чтобы исключить аварии и повреждения, обязательно предусматриваются устройства, размыкающие цепи управления электродвигателем при опасном для механизма или устройства состоянии: так называемые блокировки. Блокировки могут быть электрическими и механическими.
В схемах автоматического управления предусматривается возможность ручного управления. Если имеется необходимость управлять двигателем из нескольких мест, то устанавливаются специальные переключатели управления, исключающие возможность пуска двигателя из нескольких мест одновременно. Но останов двигателя должен осуществляться с любого из этих мест. Чертежи схем управления выполняются в многолинейном исполнении. С помощью условных обозначений вычерчиваются все элементы и соединения. Конкретные элементы изображаются в положении, которое они имеют, когда в цепях нет напряжения, а рычаги и штифты конечных выключателей, переключателей и кнопок управления показываются в исходном положении. Обычно цепи управления двигателей питаются от силовых цепей через защитные аппараты. В них используется минимально возможное количество элементов. В начале цепи устанавливают аварийный выключатель, кнопку управления и т. д., а затем - остальную аппаратуру (блок - контакты, контакты концевых выключателей, датчиков, реле, технологических устройств и т. п.). при этом предусматривается, чтобы исполнительные органы - катушки пускателей, контакторов, электромагниты включения и отключения - при разомкнутом контакте любого из аппаратов последовательной цепи управления находились без напряжения. Все часто применяющиеся схемы автоматизированного управления можно условно разделить на следующие типы: схемы, работающие в функции предельных положений (перемещения рабочего органа механизма, уровня жидкости и т. п.); в функции времени (насосы-дозаторы, технологические конвейеры, тележки и др.); в функции положения и времени. Схемы управления в функции предельных положений содержат в своем составе конечные выключатели, которые замыкают свои контакты при достижении предельного положения контролируемого перемещения. Например, двигатель насоса насосной установки должен включаться при опорожнении резервуара и отключаться при его наполнении. С этой целью устанавливается поплавковое реле, замыкающее один контакт (SL: 1) при снижении уровня воды до нижней допустимой отметки и замыкающее второй контакт (SL: 2) при верхнем уровне воды (рис. 5.4).
Значительно сложнее реализуется автоматическое управление двигателем перемещения стола фрезерного или шлифовального станка. Здесь технологическая схема работы следующая. После ручного пуска двигателя стол перемещается до предельного положения. При этом он специальным упором нажимает на штифт или рычаг конечного выключателя. Этот выключатель имеет 2 контакта - один нормально замкнутый (НЗ), другой - нормально разомкнутый (HP). Вначале размыкается НЗ - контакт, а затем замыкается HP. При этом магнитный пускатель вращения двигателя в сторону перемещения стола до предельного положения отключается и включается магнитный пускатель вращения двигателя в противоположную сторону. Стол перемещается в другом направлении до срабатывания такого же конечного выключателя, и все повторяется. На рис. 5.3 показаны цепи управления, содержащие контакты конечных выключателей, обеспечивающих описанную последовательность работы двигателя стола фрезерного станка. На рис. 5.5 приведена схема управления ленточным транспортером. Особенность ее в том, что вначале на протяжении определенного времени работает сирена, предупреждающая о пуске механизма. После этого включается двигатель. Дополнительно в схеме предусматривается останов двигателя при сходе транспортерной ленты с рабочего положения (технологическая блокировка). Для этого в цепь катушки пускателя включены НЗ - контакты концевых выключателей SQ1 и SQ2.
Популярное:
|
Последнее изменение этой страницы: 2017-03-08; Просмотров: 884; Нарушение авторского права страницы