
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Синхронные реактивные двигатели
Отличительная особенность синхронных реактивных двигателей (СРД) — отсутствие у них возбуждения со стороны ротора. Основной магнитный поток в этом двигателе создается исключительно за счет МДС обмотки статора. В двух- и в трехфазных СРД эта МДС является вращающейся. Для выяснения принципа действия СРД обратимся к выражению электромагнитного момента явнополюсной синхронной машины [см. (21.10)], из которого следует, что если отключить обмотку возбуждения (
Принцип действия СРД заключается в следующем. При включении обмотки статора в сеть возникает вращающееся магнитное
Рис.23.4. Принцип действия синхронного реактивного двигателя поле. Как только ось этого поля Однако при значении угла
Графически эта зависимость представлена кривой 2 на рис.22.2. Непременное условие создания реактивного момента Мр - явнополюсная конструкция ротора, так как только в этом случае Мощность СРД и развиваемый им момент меньше, чем у синхронного двигателя с возбужденными полюсами ротора. Объясняется это тем, что у СРД из-за отсутствия магнитного потока ротора ) ЭДС Е0 = 0, поэтому основная составляющая электромагнитного момента
Рис. 23.5. Конструкция роторов синхронного реактивного двигателя К недостаткам СРД следует также отнести невысокие значения коэффициента мощности и КПД. Объясняется это значительным намагничивающим током статора, так как возбуждение СРД происходит за счет магнитного поля статора. В СРД применяют асинхронный пуск. Для этого ротор снабжают короткозамкнутой пусковой клеткой. На рис. 23.5, а показами традиционная конструкция ротора СРД, отличающаяся от ротора асинхронного двигателя лишь наличием впадин, обеспечивающих ротору явнополюсную конструкцию. Чем больше эти впадины, тем больше отношение Наилучшие результаты дает следующее соотношение размеров ротора:
В этом случае удается добиться отношения Более совершенна секционированная конструкция ротора СРД, представляющая собой цилиндр, в котором стальные полосы 2 залиты алюминием 1(рис. 23.5 На торцах секционированного ротора имеются отлитые из алюминия кольца, замыкающие алюминиевые прослойки ротора, образуя короткозамкнутую пусковую клетку. Простота конструкции и высокая эксплуатационная надежность обеспечили СРД малой мощности широкое применение и устройствах автоматики для привода самопишущих приборов, и устройствах звуко- и видеозаписи и других установках, требующего строгого постоянства частоты вращения.
Гистерезисные двигатели Работа гистерезисного двигателя основана на действии гистерезисного момента. На рис. 23.6, а показаны два полюса постоянного магнита (поле статора); между ними расположен цилиндр (ротор) из магнитно-твердого материала. Под действием внешнего магнитного поля ротор намагничивается. На стороне обращенной к северному полюсу постоянного магнита, возбуждается южный полюс, а на стороне ротора, обращенной к южному полюсу постоянного магнита, - северный полюс. На ротор начинают действовать силы
Рис. 23.6. К понятию о гистерезисном моменте Силы Явление магнитного запаздывания заключается в том, что частицы ферромагнитного материала (помещенного во внешнее магнитное поле), представляющие собой элементарные магниты, стремятся ориентироваться в соответствии с направлением внешнего поля. Если внешнее поле изменит свое направление, то элементарные частицы меняют свою ориентацию. Однако повороту элементарных частиц препятствуют в магнитно-твердых материалах внутренние силы молекулярного трения. Для изменения направления этих частиц необходима определенная МДС, вследствие чего перемагничивание ротора несколько отстает от изменении направления внешнего поля. Это отставание (магнитное запаздывание) характеризуется углом гистерезисного сдвига На преодоление сил молекулярного трения расходуется часть подводимой мощности, которая составляет потери на гистерезис. Величина этих потерь зависит от частоты перемагничивания ротора
где т. е. в режиме к. з. Так как электромагнитная мощность, передаваемая ротору, равна потерям в роторе, деленным на скольжение [см. (13.5)]:
а вращающий момент — электромагнитной мощности, деленной на синхронную угловую скорость:
то, очевидно, величина гистерезисного момента не зависит от частоты вращения ротора (скольжения). График Мг = Угол гистерезисного сдвига зависит от ширины петли гистерезиса: чем шире петля гистерезиса магнитного материала, тем больше угол гистерезисного сдвига. На рис. 23.8, а представлены две петли гистерезиса: обычной стали (кривая 2) и сплава викаллой (кривая 1).
Рис. 23.7. Механические характеристики гистерезисного двигателя
Рис. 23.8. Петли гистерезиса обычной электротехнической стали и сплава викаллой (а) и устройство сборного ротор; гистерезисного двигателя (б)
Применение обычной стали для изготовления ротора не обеспечивает гистерезисного момента достаточной величины. Только магнитно-твердые материалы, например такие, как викаллой, дают возможность получить большой гистерезисный момент. Роторы гистерезисных двигателей обычно делают сборными. Магнитно-твердая часть выполняется в виде шихтованного или массивного кольца 1, размещенного на втулке 2 (рис. 23.8, б). Последняя жестко посажена на вал 3. В машинах с нешихтованным (массивным) ротором вращающееся поле статора наводит в роторе вихревые токи. В результат взаимодействия этих токов с полем статора возникает электромагнитный момент
где Наибольшего значения момент Таким образом, электромагнитный вращающий момент гистерезисного двигателя создается совместным действием моментов от вихревых токов М=Мвт + Мт= На рис. 23.7 представлена зависимость результирующего момента гистерезисного двигателя от скольжения: М = Гистерезисный двигатель может работать с синхронной и асинхронной частотами вращения. Однако работа двигателя в асинхронном режиме неэкономична, так как связана со значительными потерями на перемагничивание ротора, величина которых возрастает с увеличением скольжения. Достоинства гистерезисных двигателей — простота конструкции, бесшумность и надежность в работе, большой пусковой момент, плавность входа в синхронизм, сравнительно высокий КПД, малое изменение кратности тока от пуска до номинальной нагрузки ( Недостатки гистерезисных двигателей — низкий коэффициент мощности ( Шаговые двигатели Шаговые (импульсные) двигатели (ШД) используют обычно в качестве исполнительных двигателей, преобразующих электрические сигналы (импульсы напряжения) в угловые или линейные дискретные (скачкообразные) перемещения (шаги). Наибольшее применение ШД получили в электроприводах с программным управлением. Различают шаговые двигатели с активным (возбужденным) и реактивным ротором. Шаговые двигатели с активным ротором имеют обмотку возбуждения или выполнены с постоянными магнитами на роторе; шаговые двигатели с реактивным ротором не имеют обмотки возбуждения, а их ротор выполняют из магнитно-мягкого материала. Обмотку управления ШД обычно располагают на статоре и делают одно- или многофазной (чаще трех- или четырехфазной). Рассмотрим принцип действия шагового двигателя на примере реактивного трехфазною ШД, статор которого имеет шесть явно выраженных полюсов (по два полюса на фазу), а ротор — два полюса (рис. 23.9).
Рис 23.9. Принцип действия реактивного шагового двигателя
При прохождении импульса тока в фазе 1 обмотки управления ротор занимает положение, соответствующее действию электромагнитных сил, т. е. по оси полюсов 1—1. В момент времени В последующие циклы процессы в ШД будут повторяться. Таким образом, рассматриваемый реактивный трехфазный ШД работает по шеститактной схеме коммутации с раздельно-совместным включением фазных обмоток управления: Работают реактивные ШД от однополярных импульсов напряжения, так как изменение полярности этих импульсов не изменяет направления реактивного момента. Для изменения направления вращения ротора рассматриваемого ШД необходимо изменить схему коммутации обмоток, например Если в этом двигателе применить раздельное включение обмоток, т. е. принять схему коммутации 1 Шаг двигателя (град)
где Уменьшение шага Шаговые двигатели с активным ротором (с обмоткой возбуждения или постоянными магнитами на роторе) позволяют получить, большие значения вращающего момента, а также обеспечивают фиксацию ротора при отсутствии управляющего сигнала. Один из важных параметров ШД — частота приемистости - максимальная частота следования управляющих импульсов, при которой ротор втягивается в синхронизм с места без потери шага. У шаговых двигателей реактивного типа частота приемистости при номинальной нагрузке достигает 1000 — 1300 Гц. С увеличением шага частота приемистости уменьшается. Шаговый двигатель работает в комплекте с коммутатором — устройством, преобразующим заданную последовательность управляющих импульсов в При рассматривании принципа работы шагового двигателя влияние нагрузочного момента на валу двигателя не учитывалось. Если же на вал шагового двигателя действует нагрузочный момент
где Быстродействие шаговых двигателей определяется скоростью протекания электромагнитных процессов при переключении управляющих импульсов напряжения с одной фазы статора на другую. Скорость протекания этих процессов оценивается электромагнитной постоянной времени, с
где Для повышения быстродействия шагового двигателя в обмотки фаз статора последовательно включают резисторы
Энергетическим показателем шагового двигателя является значение потребляемой мощности Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 2483; Нарушение авторского права страницы
 = 0), то основная составляющая момента становится равной нулю и на ротор машины продолжает действовать лишь реактивная составляющая момента [см. (21.12)]
= 0), то основная составляющая момента становится равной нулю и на ротор машины продолжает действовать лишь реактивная составляющая момента [см. (21.12)]
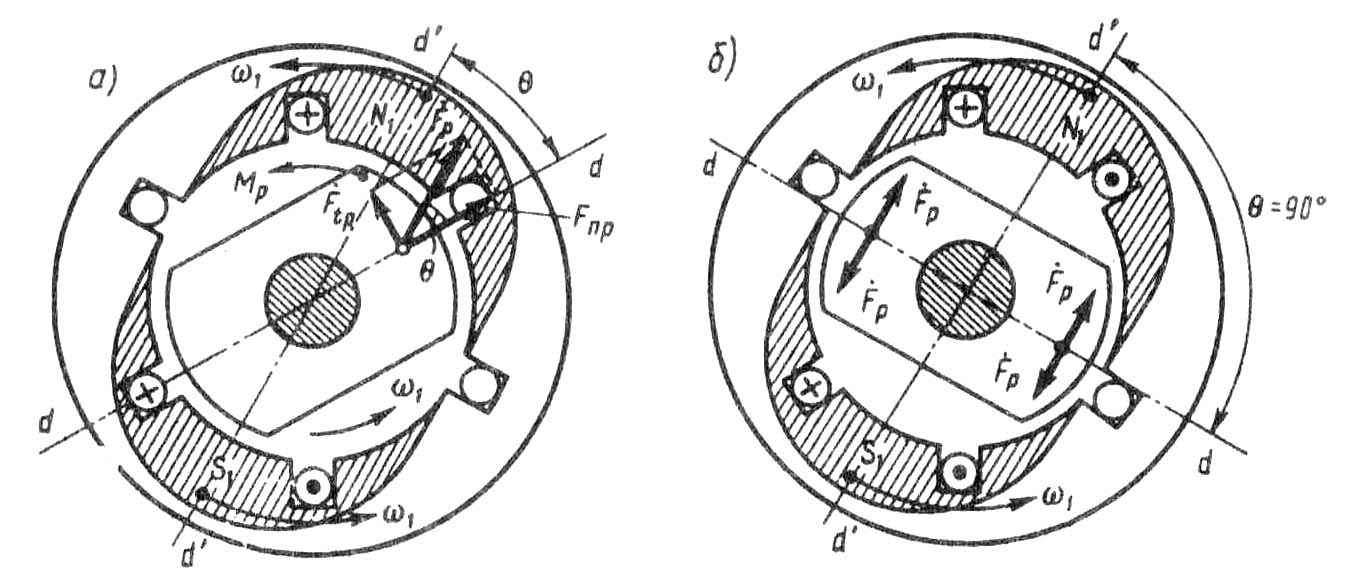
 займет положение в пространстве расточки статора, при котором она будет смещена относительно продольной оси невозбужденных полюсов ротора
займет положение в пространстве расточки статора, при котором она будет смещена относительно продольной оси невозбужденных полюсов ротора  на угол
на угол  в сторону вращения (рис. 23.4, а), между полюсами этого поля и выступающими полюсами невозбужденного ротора возникнет реактивная сила магнитного притяжения полюса ротора к полюсу вращающегося поля статора
в сторону вращения (рис. 23.4, а), между полюсами этого поля и выступающими полюсами невозбужденного ротора возникнет реактивная сила магнитного притяжения полюса ротора к полюсу вращающегося поля статора  . Вектор этой силы
. Вектор этой силы  смещен относительно продольной оси ротора также на угол
смещен относительно продольной оси ротора также на угол  , направленную по продольной оси ротора, и тангенциальную
, направленную по продольной оси ротора, и тангенциальную  , направленную перпендикулярно продольной оси полюсов ротора. Совокупность тангенциальных составляющих реактивных сил
, направленную перпендикулярно продольной оси полюсов ротора. Совокупность тангенциальных составляющих реактивных сил  , который будет вращать ротор с синхронной частотой
, который будет вращать ротор с синхронной частотой  . С ростом механической нагрузки на вал СРД угол
. С ростом механической нагрузки на вал СРД угол  синхронного двигателя с возбужденным ротором (см. рис. 22.2, график 1), который при
синхронного двигателя с возбужденным ротором (см. рис. 22.2, график 1), который при  , действующие на каждый полюс невозбужденного ротора, взаимно уравновешиваются и реактивный момент
, действующие на каждый полюс невозбужденного ротора, взаимно уравновешиваются и реактивный момент  . Максимальное значение реактивного момента
. Максимальное значение реактивного момента  наступает при значении угла
наступает при значении угла  (23.1)
(23.1) .
. = 0 [см. (21.11)] и электромагнитный момент СРД определяется лишь реактивной составляющей (
= 0 [см. (21.11)] и электромагнитный момент СРД определяется лишь реактивной составляющей (  = Мр). Поэтому при одинаковых габаритах синхронного двигателя с возбужденными полюсами ротора и СРД мощность на валу и развиваемый момент у СРД намного меньше.
= Мр). Поэтому при одинаковых габаритах синхронного двигателя с возбужденными полюсами ротора и СРД мощность на валу и развиваемый момент у СРД намного меньше.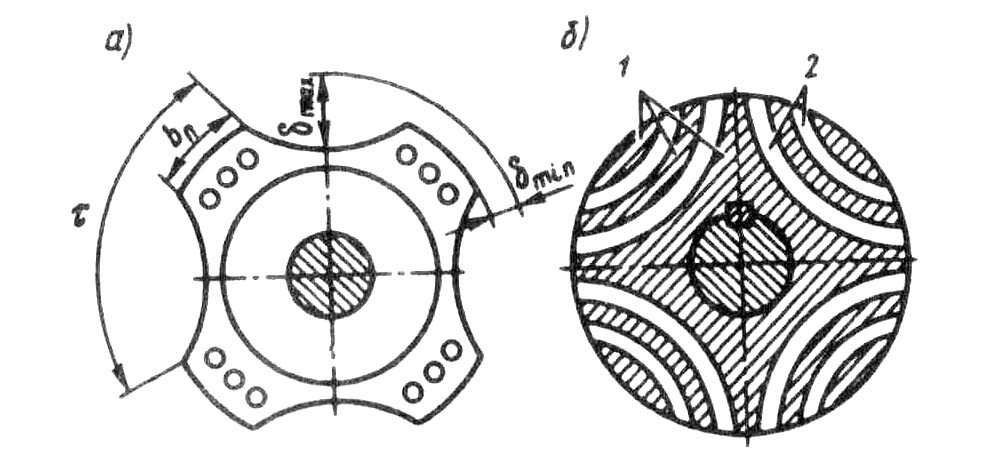
 , а следовательно, и реактивный момент Мр. Однако с увеличением впадин растет средняя величина воздушного зазора, что ведет к повышению намагничивающего тока статора, а следовательно, к снижению энергетических показателей двигателя — коэффициента мощности и КПД. Кроме того, с увеличением впадин сокращаются размеры пусковой клетки, что ведет к уменьшению асинхронного момента, т. е. к уменьшению пускового момента и момента входа в синхронизм.
, а следовательно, и реактивный момент Мр. Однако с увеличением впадин растет средняя величина воздушного зазора, что ведет к повышению намагничивающего тока статора, а следовательно, к снижению энергетических показателей двигателя — коэффициента мощности и КПД. Кроме того, с увеличением впадин сокращаются размеры пусковой клетки, что ведет к уменьшению асинхронного момента, т. е. к уменьшению пускового момента и момента входа в синхронизм. и
и  .
. 2.
2. ).Такая конструкция ротора позволяет получить отношение
).Такая конструкция ротора позволяет получить отношение  . За счет этого существенно возрастает момент Мртах при сохранении намагничивающего тока на допустимом уровне.
. За счет этого существенно возрастает момент Мртах при сохранении намагничивающего тока на допустимом уровне. , направленные радиально к его поверхности. Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол
, направленные радиально к его поверхности. Если полюсы постоянного магнита вращать вокруг ротора, то вследствие явления магнитного запаздывания (гистерезиса) активная часть ротора не будет перемагничиваться одновременно с изменением направления вращающегося магнитного поля и между осью поля ротора и осью внешнего поля появится угол  .
.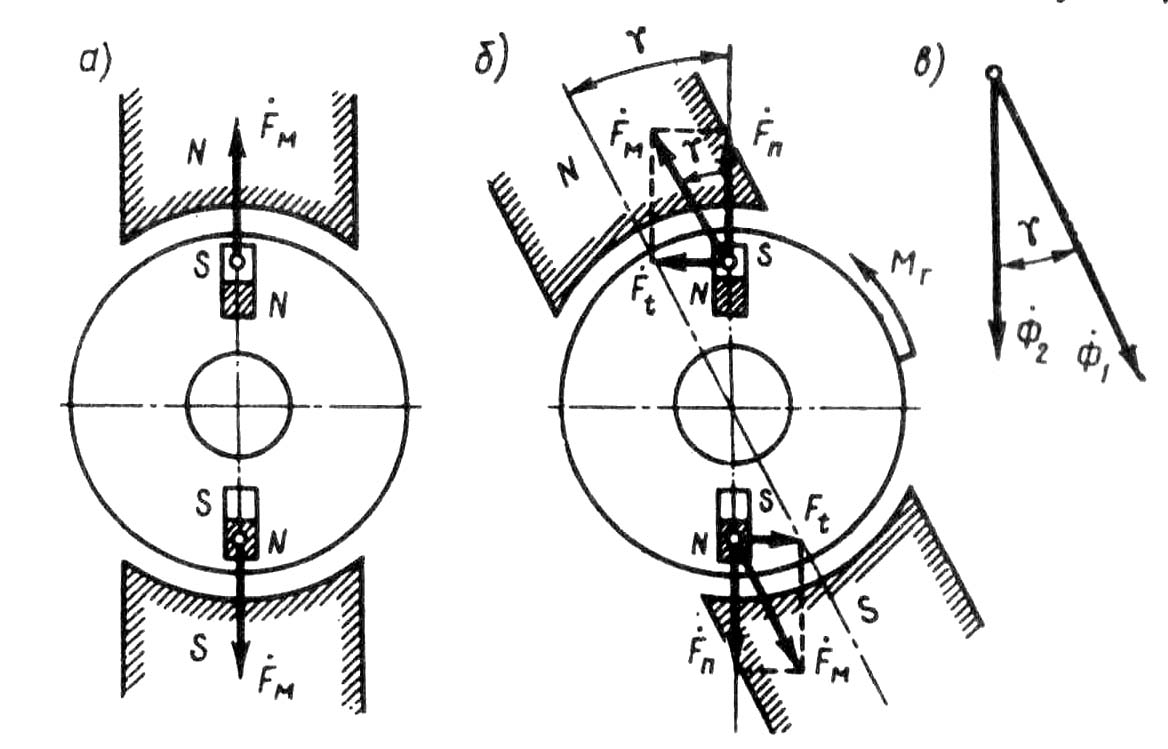
 , создадут гистерезисный момент Мг (рис. 23.6, б).
, создадут гистерезисный момент Мг (рис. 23.6, б).  и вектором магнитного потока обмотки статора
и вектором магнитного потока обмотки статора  , (рис. 23.6, в). Этот угол зависит исключительно от магнитных свойств материала ротора.
, (рис. 23.6, в). Этот угол зависит исключительно от магнитных свойств материала ротора. , а следовательно, от скольжения:
, а следовательно, от скольжения:  (23.2)
(23.2) — потери на гистерезис при неподвижном роторе (при
— потери на гистерезис при неподвижном роторе (при  =1),
=1),  , (23-3)
, (23-3) (23.4)
(23.4) представляет собой прямую, параллельную оси абсцисс (рис. 23.7).
представляет собой прямую, параллельную оси абсцисс (рис. 23.7).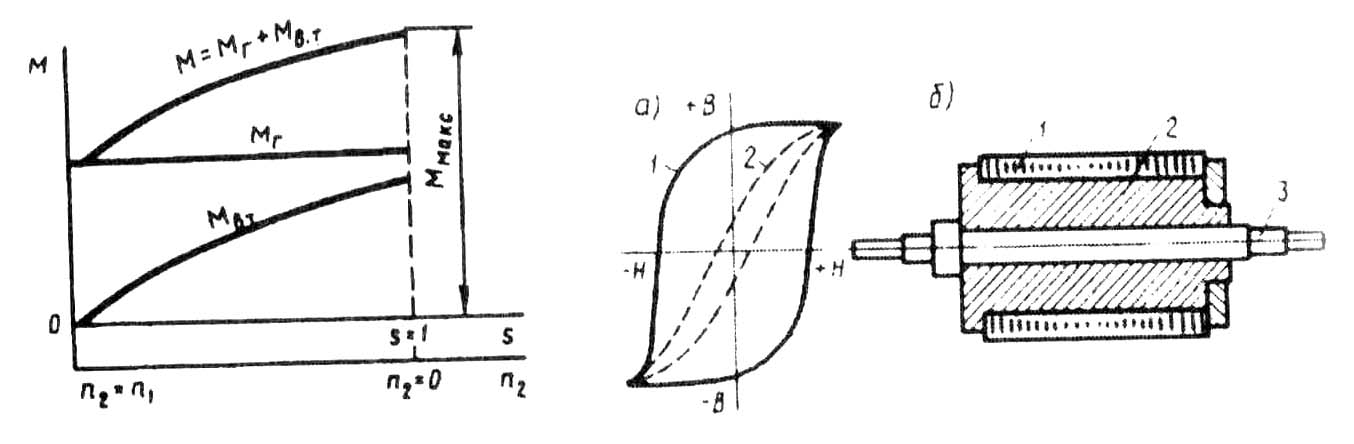
 , значение которого пропорционально скольжению:
, значение которого пропорционально скольжению:  (23.5)
(23.5)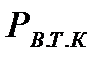 — потери на вихревые токи в роторе при
— потери на вихревые токи в роторе при  = 1, т. е. в режиме к.з., Вт;
= 1, т. е. в режиме к.з., Вт;  , — угловая синхронная скорость, рад/с.
, — угловая синхронная скорость, рад/с. . (23.6)
. (23.6) . Характер этой кривой зависит от соотношения моментов
. Характер этой кривой зависит от соотношения моментов  ).
). , = 0, 4—0, 5) и сравнительно высокая стоимость. Кроме того, при резких колебаниях нагрузки гистерезисные двигатели склонны к качаниям, что создает неравномерность хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.
, = 0, 4—0, 5) и сравнительно высокая стоимость. Кроме того, при резких колебаниях нагрузки гистерезисные двигатели склонны к качаниям, что создает неравномерность хода (вращения). Объясняется это отсутствием у гистерезисных двигателей пусковой клетки, которая при резких изменениях нагрузки оказывает на ротор успокаивающее (демпфирующее) действие. Наиболее сильные качания наблюдаются у шихтованного ротора, в котором вихревые токи сильно ограничены. Вызываемая качаниями неравномерность вращения ограничивает области применения гистерезисных двигателей.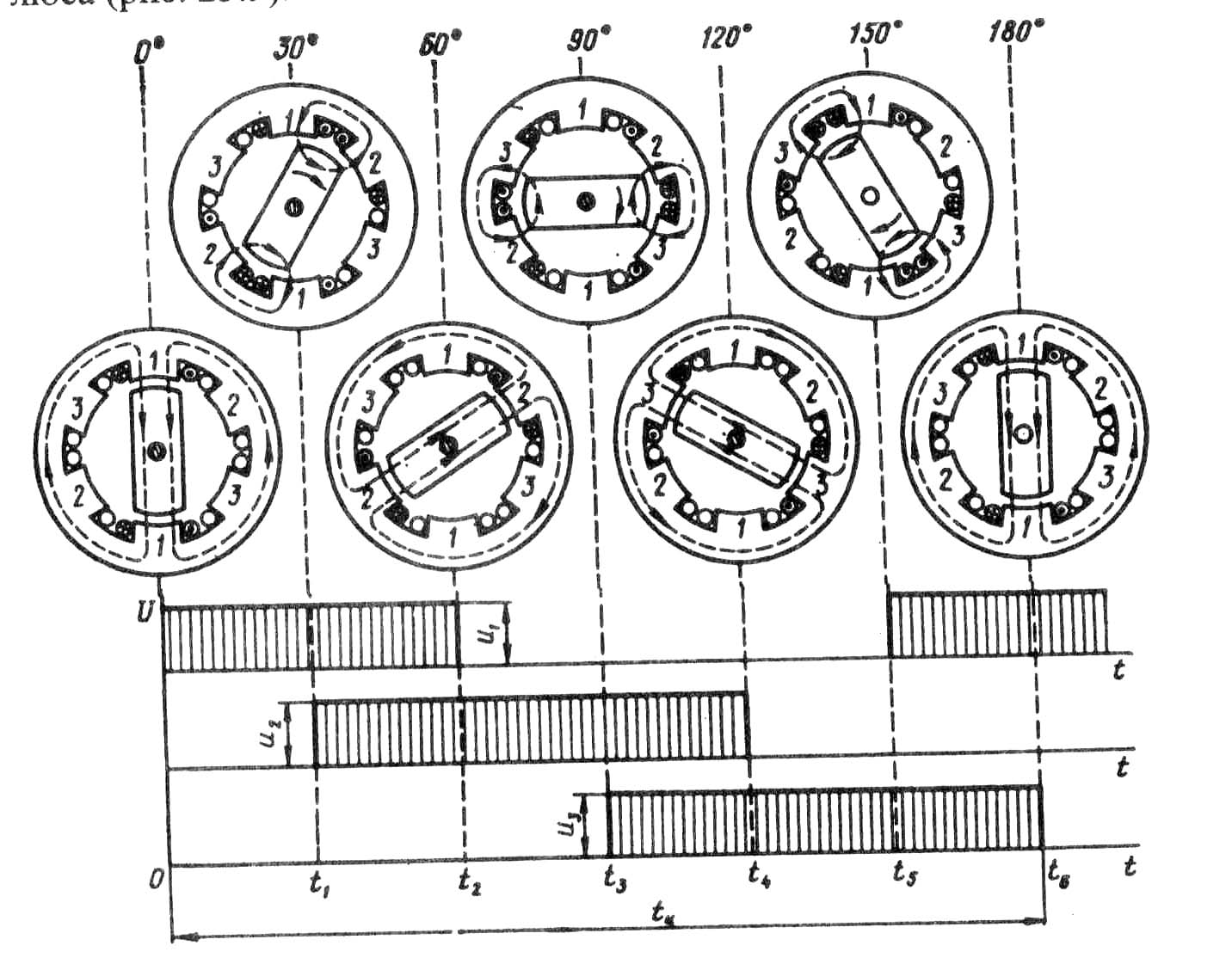
 появится импульс тока в фазе 2. При этом на ротор будут действовать силы, обусловленные одновременным воздействием двух МДС (полюсов 1— 1 и 2—2). В результате ротор повернется по часовой стрелке и займет положение, промежуточное между полюсами 1—1 к 2—2, т. е. повернется на шаг
появится импульс тока в фазе 2. При этом на ротор будут действовать силы, обусловленные одновременным воздействием двух МДС (полюсов 1— 1 и 2—2). В результате ротор повернется по часовой стрелке и займет положение, промежуточное между полюсами 1—1 к 2—2, т. е. повернется на шаг  = 30°. В момент
= 30°. В момент  импульс тока в фазе 1 прекратится и ротор, сделав шаг
импульс тока в фазе 1 прекратится и ротор, сделав шаг  появится импульс тока в фазе 3 и ротор, повернувшись еще на 30°, займет положение между полюсами статора 2—2 и 3—3. В моменты времени
появится импульс тока в фазе 3 и ротор, повернувшись еще на 30°, займет положение между полюсами статора 2—2 и 3—3. В моменты времени  и
и  ротор также будет совершать шаги по 30° и в конце цикла (момент
ротор также будет совершать шаги по 30° и в конце цикла (момент  .
. ...
... 2
2  , (23.7)
, (23.7) — число полюсных выступов на роторе; ту — число фазных обмоток управления, пространственно смещенных относительно друг друга;
— число полюсных выступов на роторе; ту — число фазных обмоток управления, пространственно смещенных относительно друг друга;  - коэффициент, определяемый способом включения фазных обмоток управления (при раздельном включении
- коэффициент, определяемый способом включения фазных обмоток управления (при раздельном включении  = 1, при раздельно-совместном —
= 1, при раздельно-совместном —  = 2).
= 2). -фазную систему прямоугольных импульсов напряжения.
-фазную систему прямоугольных импульсов напряжения. , то при переключении управляющего импульса с одной фазы на другую МДС статора повернется на угол
, то при переключении управляющего импульса с одной фазы на другую МДС статора повернется на угол  называемый углом статической ошибки шагового двигателя, эл. град:
называемый углом статической ошибки шагового двигателя, эл. град: 
 — максимальный статический момент, соответствующий углу смещения ротора относительно вектора МДС статора
— максимальный статический момент, соответствующий углу смещения ротора относительно вектора МДС статора  ,
,  — индуктивность обмотки одной фазы статора, Гн;
— индуктивность обмотки одной фазы статора, Гн;  - активное сопротивление обмотки одной фазы статора, Ом.
- активное сопротивление обмотки одной фазы статора, Ом. , тогда
, тогда
 . Частота вращения шагового двигателя регулируется изменением частоты подачи управляющих импульсов напряжения на фазы обмотки статора.
. Частота вращения шагового двигателя регулируется изменением частоты подачи управляющих импульсов напряжения на фазы обмотки статора.