
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Исполнительные двигатели постоянного тока⇐ ПредыдущаяСтр 85 из 85
Исполнительные двигатели постоянного тока, так же как исполнительные асинхронные двигатели (см. § 17.4), применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Помимо обычных требований, предъявляемых к электродвигателям общего назначения, к исполнительным двигателям предъявляется ряд специфических требований, из которых основными являются отсутствие самохода и малоинерционность (см. § 17.4). Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую — обмотку управления электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность. Исполнительные двигатели постоянного тока по конструкции отличаются от двигателей постоянного тока общего назначения только тем, что имеют шихтованные (набранные из листов электротехнической стали) якорь, станину и полюсы, что необходимо для работы исполнительных двигателей в переходных режимах. Магнитная цепь исполнительных двигателей не насыщена, поэтому реакция якоря (см. § 26.2) практически не влияет на их рабочие характеристики. В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже — двигатели с постоянными, магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря — двигатели с якорным управлением, либо обмотку полюсов — двигатели с полюсным управлением. У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления — обмотка якоря (рис. 30.10, а). Обмотку возбуждения подключают к сети с постоянным напряжением У исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (рис. 30.10, б). Якорь двигателя постоянно подключен к сети с напряжением
Рис. 30.10. Схема включения исполнительных двигателей постоянного тока Исполнительные двигатели постоянного тока обычной конструкции имеют существенный недостаток — замедленность переходных процессов, т. е. отсутствие малоинерционности. Объясняется это в основном двумя причинами: наличием массивного якоря со стальным сердечником, обладающим значительным моментом инерции, и значительной индуктивностью
Рис. 30.11. Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Для уменьшения момента инерции якоря его обмотка отделена от массивного ферромагнитного сердечника, последний выполнен неподвижным (внутренний статор 5) и расположен на цилиндрическом выступе подшипникового щита 6. Обмотка якоря в процессе изготовления укладывается на цилиндрический каркас, а затем заливается пластмассой. Готовый якорь 4 представляет собой полый стакан, состоящий из проводников обмотки, связанных воедино пластмассой. Концы секций обмотки, как и в обычном двигателе, соединяются с пластинами коллектора, который является частью дна полого стакана якоря 4. Вращающийся узел двигателя с гладким якорем состоит из вала, коллектора и обмотки якоря, залитой пластмассой. Момент инерции полого якоря значительно меньше момента инерции обычного якоря, что обеспечивает хорошее быстродействие двигателя. Кроме того, индуктивность обмотки якоря снижается, что также способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки улучшает коммутацию двигателя за счет уменьшения реактивной ЭДС (см § 27.4). Недостаток рассмотренного малоинерционного двигателя с полым якорем — наличие большого немагнитного промежутка между полюсами статора и неподвижным ферромагнитным сердечником — внутренним статором. Этот промежуток складывается из двух воздушных зазоров и толщины стакана якоря (толщины слоя обмотки якоря). Наличие большого немагнитного промежутка на пути магнитного потока требует значительного увеличения МДС возбуждения, что приводит, во-первых, к увеличению габаритов двигателя из-за увеличения объема обмотки возбуждения, а во-вторых, к росту потерь на нагрев обмотки возбуждения. Однако КПД двигателя с полым якорем вследствие отсутствия потерь в стали сердечника якоря практически находится на том же уровне, что и в обычных двигателях, а в случае применения для возбуждения постоянных моментов значительно превосходит КПД последних.
Контрольные вопросы 1. Каково назначение компенсационной обмотки в ЭМУ? 2. Почему выходная характеристика тахогенератора криволинейна? 3. Будет ли работать БДПТ, если изменить полярность напряжения на его входе (см. рис. 30.6)? 4. Объясните принцип якорного и полюсного способов управления исполнительными двигателями? 5. Каковы достоинства и недостатки малоинерционного двигателя постоянного тока?
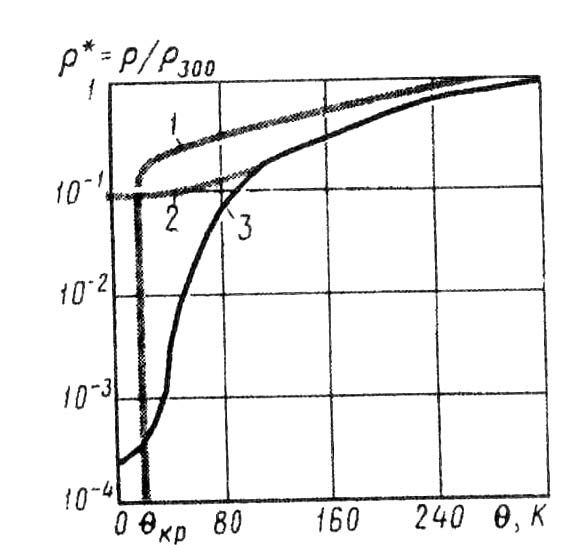
Заключение Достижения науки и техники, обусловленные ускорением научно-технического прогресса, способствуют совершенствованию всех отраслей промышленности и транспорта. В первую очередь, это относится к электрическим машинам, составляющим основу электроэнергетики, как в процессе производства электроэнергии, так и в процессе ее потребления. Совершенствование электрических машин ведется по двум направлениям. Во-первых, совершенствование технологии изготовления электрических машин, с целью увеличения их производства и снижения стоимости. Во-вторых, применение в электрических машинах более качественных магнитных и электроизоляционных материалов, с целью повышения технико-экономических показателей электрических машин. И, наконец, в-третьих, создание новых видов электрических машин нетрадиционной конструкции, с использованием новейших достижений науки. Работы последних лет показали, что резервы по усовершенствованию электрических машин традиционной конструкции во многом исчерпаны. Поэтому оказывается целесообразным переход к электрическим машинам нового принципа исполнения. В этом смысле особый интерес представляют криогенные и магнитогидродинамические электрические машины. Криогенные электрические машины. В криогенных электрических машинах обмотки выполняют из сверхпроводников или химически чистых металлов (гиперпроводников). При снижении температуры удельное электрическое сопротивление сверхпроводников вначале плавно снижается, а затем при температуре критического перехода Θ кр = 20 К (ниже -253 °С) резко падает до нуля: ρ * = 0 (ρ = 0), т. е. они переходят в состояние сверхпроводимости (рис. 3.1, кривая 1). У обычных металлов и сплавов нет состояния сверхпроводимости, и при снижении температуры их удельное электрическое сопротивление плавно уменьшается, достигая значения ρ * = 10-1 при температуре абсолютного нуля (кривая 2). У химически чистых металлов (гиперпроводников) также нет состояния сверхпроводимости, но при глубоком охлаждении их удельное электрическое сопротивление уменьшается до значения, в 5—7 тыс. раз меньшего, чем при комнатной температуре (кривая 3).
Рис.3.1. Зависимость электрического сопротивления проводников от температуры: 1 — сверхпроводники; 2 -обычные металлы; 3 — химически чистые металлы
Это свойство сверхпроводников и чистых металлов позволяет по проводам небольшого сечения пропускать значительные токи, доводя плотность тока до 100 А/мм2 и более. Электрические потери на нагрев обмоток при этом либо отсутствуют, либо незначительны. Все это дает возможность получать в криогенных машинах сильные магнитные поля с магнитной индукцией В = 5 ÷ 10 Тл (в машинах традиционного выполнения В = 0, 8 ÷ 1, 5 Тл). Криогенная машина не содержит ферромагнитного сердечника, который, обладая свойством магнитного насыщения, не позволил бы получить столь высокие значения магнитной индукции, так как вызвал бы в машине значительные магнитные потери. Снижение потерь (электрических и магнитных) позволяет повысить КПД машин и более эффективно использовать их габариты, создавая машины весьма большой единичной мощности. Необходимым элементом криогенной машины является криостат, представляющий собой теплоизолированную от внешней среды емкость, заполненную хладагентом (например, жидким гелием). Внутри криостата располагают охлаждаемую обмотку или же электрическую машину целиком. Рассмотрим конструктивную схему криогенного турбогенератора со сверхпроводящими обмотками статора 4 и ротора 3 (рис. 3.2). Вся машина помещена в криостат, заполненный жидким гелием при температуре 10 К (-263 °С). На валу 2 расположено четыре металлических «полюса» 5, на каждом из которых укреплена говитковая полюсная катушка 3 из
Рис. 3.2. Конструктивная схема криогенного турбогенератоРа со сверхпроводящими обмотками на статоре и роторе
сверхпроводника. Статор заключен в магнитный экран 7 из сверхпроводящего сплава. Поверхность экрана имеет множество отверстий, через которые внутрь машины проникает жидкий гелий. «Полюсы» ротора 5 и «сердечник» статора б, а также другие элементы конструкции машины не обладают ферромагнитными свойствами, а используются лишь для надежного закрепления обмоток. Вся машина заключена в металлический кожух 8, образующий стенки криостата. Затем следует толстый слой теплоизоляции 9. Выделяющаяся за счет потерь теплота, а также теплота, проникающая в криостат из внешней среды, отбирается жидким гелием. Криогенная машина снабжена рефрижератором 10, подающим в криостат охлажденный гелий взамен испаряющегося. Контактные кольца 11 находятся в холодной зоне, а подшипники 1 и 12 вынесены за пределы криостата. Рассмотренная конструкция криогенного генератора обладает существенным недостатком - значительные потери энергии в обмотке статора, вызванные переменным током в обмотке статора и переменным магнитным полем, наведанным этой обмоткой. Эти потери происходят главным образом из-за явления гистерезиса в сверхпроводящей обмотке. Пока еще не найдены эффективные способы ослабления этих потерь, вызывающих интенсивное испарение хладагента (жидкого гелия). Поэтому помимо электрических машин с криогированием обеих обмоток создаются и исследуются криогенные машины с криогированием только обмотки возбуждения. Эта обмотка питается постоянным током и защищена алюминиевым (демпфирующим) экраном от воздействия переменного магнитного поля обмотки статора, поэтому в ней не происходят явления, вызывающие магнитные потери. Обмотка статора в такой машине имеет обычную конструкцию, т. е. она вынесена за пределы криостата. Исследования показали, что КПД криогенного синхронного турбогенератора с учетом всех дополнительных расходов энергии на собственные нужды (включая гелиевое охлаждение обмотки возбуждения) на 0, 8% выше, чем у обычного синхронного генератора с водородным охлаждением мощностью 1200 тыс. кВт. При этом криогенный генератор имеет массу в четыре раза меньше. В последнее время получены проводниковые материалы, обладающие сверхпроводимостью при температуре кипения жидкого азота (-196 °С) —хладагента более дешевого, чем жидкий гелий (температура кипения -268, 9 °С). Ведутся работы по созданию проводниковых материалов с еще более высокой температурой сверхпроводимости. Применение этих материалов в криогенном электромашиностроении упростит конструкцию криостатов и снизит стоимость криогенных электрических машин. Исследования показали, что в ближайшие 10—20 лет криогенное электромашиностроение станет одним из ведущих направлений при создании электрических машин особо большой мощности, выполнение которых по традиционным принципам технически невозможно. *****многовитковая полюсная катушка 3 из сверхпроводника. Статор заключен в магнитный экран 7 из сверхпроводящего сплава. Поверхность экрана имеет множество отверстий, через которые внутрь машины проникает жидкий гелий. «Полюсы» ротора 5 и «сердечник» статора 6, а также другие элементы конструкции машины не обладают ферромагнитными свойствами, а используются лишь для надежного закрепления обмоток. Вся машина заключена в металлический кожух 8, образующий стенки криостата. Затем следует толстый слой теплоизоляции 9. Выделяющаяся за счет потерь теплота, а также теплота, проникающая в криостат из внешней среды, отбирается жидким гелием. Криогенная машина снабжена рефрижератором 10, подающим в криостат охлажденный гелий взамен испаряющегося. Контактные кольца 11 находятся в холодной зоне, а подшипники 1 и 12 вынесены за пределы криостата. Рассмотренная конструкция криогенного генератора обладает существенным недостатком - значительные потери энергии в обмотке статора, вызванные переменным током в обмотке статора и переменным магнитным полем, наведенным этой обмоткой. Эти потери происходят главным образом из-за явления гистерезиса в сверхпроводящей обмотке. Пока еще не найдены эффективные способы ослабления этих потерь, вызывающих интенсивное испарение хладагента (жидкого гелия). Поэтому помимо электрических машин с криогированием обеих обмоток создаются и исследуются криогенные машины с криогированием только обмотки возбуждения. Эта обмотка питается постоянным током и защищена алюминиевым (демпфирующим) экраном от воздействия переменного магнитного ноля обмотки статора, поэтому в ней не происходят явления, вызывающие магнитные потери. Обмотка статора в такой машине имеет обычную конструкцию, т. е. она вынесена за пределы криостата. Исследования показали, что КПД криогенного синхронного турбогенератора с учетом всех дополнительных расходов энергии на собственные нужды (включая гелиевое охлаждение обмотки возбуждения) на 0, 8% выше, чем у обычного синхронного генератора с водородным охлаждением мощностью 1200 тыс. кВт. При этом криогенный генератор имеет массу в четыре раза меньше. В последнее время получены проводниковые материалы, обладающие сверхпроводимостью при температуре кипения жидкого азота (-196°Г) —хладагента более дешевого, чем жидкий гелий (температура кипения -268, 9 °С). Ведутся работы по созданию проводниковых материалов с еще более высокой температурой сверхпроводимости. Применение этих материалов в криогенном электромашиностроении упростит конструкцию криостатов и снизит стоимость криогенных электрических машин. Исследования показали, что в ближайшие 10—20 лет криогенное электромашиностроение станет одним из ведущих направлений при создании электрических машин особо большой мощности, выполнение которых по традиционным принципам технически невозможно. Магнитогидродинамические электрические машины. Рассмотрим принцип действия магнитогидродинамического (МГД) генератора, в котором тепловая энергия преобразуется непосредственно в электрическую. Принцип действия основан на том, что при движении рабочего тела, обладающего достаточной электропроводностью (электролита, жидкого металла, ионизированного газа), поперек силовых линий магнитного поля в этом рабочем теле индуцируется ЭДС и возникает ток, который через соответствующие электроды отводится во внешнюю электрическую цепь. Для пояснения воспользуемся упрощенной схемой МГД- генератора (рис. 3, а), в котором рабочим телом являются продукты сгорания топлива с присадкой, усиливающей их электропроводность. Топливо 1, воздух 2 и присадка 3 подаются н камеру сгорания 4. Образующийся при этом ионизированный газ выходит из сопла 5 и проходит через внутреннюю полость электромагнита 6 поперек магнитных силовых линий поля. В соответствии с явлением электромагнитной индукции в ионизированном газе наводится ЭДС, которая снимается двумя электродами 7 и подается во внешнюю цепь к потребителю rн. Ионизированный газ, пройдя через магнитное поле, выходит из генератора. Таким образом, в МГД-генераторе теплота, образуемая при сгорании топлива, непосредственно преобразуется в электрическую энергию, а поэтому необходимость в получении механической энергии отпадает (не нужны паровой котел и паровая турбина). Исследования показали, что МГД-генераторы приобретают существенные преимущества перед тепловыми электростанциями традиционного действия лишь при условиях значительной единичной мощности (более 100 МВт) и изготовлении обмотки электромагнита из сверхпроводника, помещенного в криостат. МГД-генераторы обратимы и могут работать в двигательном режиме. Обычно МГД-двигатели применяются для перемещения электропроводных жидкостей, их принято называть МГД- насосами. Для пояснения принципа работы МГД - насоса обратимся к рис. 3.3, б. Электропроводная жидкость, проходя через канал 1, попадает в пространство между полюсами N и S электромагнита. При этом через жидкость от электрода 2 к электроду 3 проходит электрический ток, который взаимодействует с магнитным полем и создает электромагнитные
Рис. 3.3. Принцип действия МГД-генератора (а) и МГД-двигателя (б)
силы, которые и «проталкивают» жидкость через межполюсное пространство электромагнита. Подобные МГД-насосы могут применяться для транспортировки различных электропроводных жидкостей. Например, их можно использовать для перемещения расплавленного металла в литейном производстве. Рассмотренные МГД-машины называют кондукционными, так как их конструкция предусматривает обязательное наличие электродов для съема или подачи электрического тока. Созданы также МГД-машины индукционные (асинхронные), в которых отсутствуют электроды, а ЭДС или электромагнитные силы возникают в результате взаимодействия перемещаемой электропроводной жидкости с бегущим магнитным полем [1].
Задачи для самостоятельного решения
1. ТРАНСФОРМАТОРЫ
Задача 1.1. Однофазный трансформатор включен в сеть с частотой тока 50 Гц. Номинальное вторичное напряжение U2ном, а коэффициент трансформации k. Определить число витков в обмотках w1 и w2, если в стержне магнитопровода трансформатора сечением Qст максимальное значение магнитной индукции Вmах (табл. 1.1).
Таблица 1.1
Задача 1.2. Для однофазного трансформатора номинальной мощностью Sном и первичным напряжением U1ном, мощностью короткого замыкания Рк.ном и напряжением к.з. uк рассчитать данные и построить график зависимости изменения вторичного напряжения Δ U от коэффициента нагрузки β, если коэффициент мощности нагрузки соs φ 2 (табл. 1.2).
Таблица 1.2
Задача 1.3. Для однофазного трансформатора, данные которого приведены в задаче 1.2, рассчитать и построить график зависимости КПД от нагрузки η = f (β ), если максимальное значение КПД трансформатора соответствует коэффициенту нагрузки β / = 0, 7.
Задача 1.4. Трехфазный трансформатор номинальной мощностью Sном и номинальными напряжениями (линейными) U1ном и U2ном имеет напряжение короткого замыкания uк, ток холостого хода i0, потери холостого хода Р0ном и потери короткого замыкания Р к.ном. Обмотки трансформатора соединены по схеме «звезда— звезда». Требуется определить параметры Т-образной схемы замещения, считая ее симметричной: r1 = r2' и х1 = х2'; определить КПД η и полезную мощность Р2, соответствующие значениям полной потребляемой мощности S1 = 0, 25 Sном, S2 = 0, 5 Sном, S3 = 0, 75 Sном и S4 = Sном при коэффициентах мощности нагрузки соs φ 2 = 0, 8 и соs φ 2 = 1, по полученным данным построить графики η = f(P2) в одних осях координат; определить номинальное изменение напряжения Δ Uном (табл. 1.3). Таблица 1.3
Задача 1.5. Три трехфазных трансформатора номинальной мощностью SномI, SномII и SномIII включены на параллельную работу. Требуется определить: 1) нагрузку каждого трансформатора (SI, SII и SIII ) в кВ 2) степень использования каждого из трансформаторов по мощности (S/ Sном); 3) насколько следует уменьшить общую нагрузку трансформаторов Sобщ, чтобы устранить перегрузку трансформаторов; как при этом будут использованы трансформаторы по мощности в процентах (табл. 1.4).
Таблица 1.4
2. ОБЩИЕ ВОПРОСЫ ТЕОРИИ БЕСКОЛЛЕКТОРНЫХ МАШИН
Задача 2.1. Рассчитать параметры и начертить развернутую схему трехфазной двухслойной обмотки статора по данным, приведенным в табл. 2.1. Выбрать укорочение шага обмотки, чтобы уничтожалась v-я высшая гармоника в кривой индуцированной ЭДС обмотки. Соединение катушечных групп последовательное, фазы обмотки соединить звездой, катушки одновитковые.
Таблица 2.1
Задача 2.2. Используя данные и результаты расчета задачи 2.1, определить эффективные значения фазной и линейной ЭДС первой, третьей, пятой и седьмой гармоник, приняв величину основного магнитного потока Ф = 3/ Z1 Вб и частоту тока 50 Гц. Рассчитать значения этих ЭДС, если бы шаг обмотки был полным.
Задача 2.3. По данным задачи 2.1 рассчитать параметры и начертить развернутую схему трехфазной однослойной обмотки статора с лобовыми соединениями, расположенными в двух плоскостях. Катушечные группы соединить последовательно, фазные обмотки соединить звездой.
3. АСИНХРОННЫЕ МАШИНЫ Задача 3.1. Определить значения ЭДС, индуцируемые вращающимся магнитным потоком Ф в обмотке статора Е1, в неподвижном и вращающемся роторах E2 и Е2s, частоту вращения ротора n2 и частоту тока в роторе f2, если известны число последовательно соединенных витков фазы обмотки статора w1, обмоточный коэффициент kоб1, число полюсов 2р, частота тока f1 = 50 Гц и номинальное скольжение sном (табл. 3.1).
Таблица 3.1
Задача 3.2. Трехфазный асинхронный двигатель с короткозамкнутым ротором серии 4А имеет технические данные, приведенные в табл. 3.2. Определить высоту оси вращения h, число полюсов 2р, скольжение при номинальной нагрузке sном, момент на валу Мном, начальный пусковой Мп и максимальный Мmах моменты, номинальный и пусковой токи I1ном и Iп в питающей сети при соединении обмоток статора звездой и треугольником. Таблица 3.2
Задача 3.3. Трехфазный асинхронный двигатель с короткозамкнутым ротором, работающий от сети частотой 50 Гц и напряжением U1 (фазное), имеет параметры, приведенные в табл. 3.3: номинальная мощность Рном, коэффициент мощности соs φ 1ном, магнитные потери Рм механические потери Рмх, активное сопротивление фазы обмотки статора r1 при рабочей температуре, активное приведенное сопротивление обмотки ротора r/2. Рассчитать данные и построить график зависимости КПД от относительного значения полезной мощности η = f (Р2/ Рном). При этом принять добавочные потери равными Рдоб = 0, 005 Р2, а коэффициент мощности считать изменяющимся в функции Р2/ Рном в соответствии с графиком 2 на рис. 13.9. Таблица 3.3
Задача 3.4. Трехфазный асинхронный двигатель с короткозамкнутым ротором работает от сети переменного тока частотой 50 Гц. При номинальной нагрузке ротор двигателя вращается с частотой n2ном; перегрузочная способность двигателя λ, а кратность пускового момента Мп/ Мном. Рассчитать данные и построить механическую характеристику двигателя в относительных единицах М* = f (s) (табл. 3.4).
Таблица 3.4
4. СИНХРОННЫЕ МАШИНЫ
Задача 4.1. Имеется трехфазный синхронный генератор мощностью Sном с напряжением на выходе U1ном (обмотка статора соединена звездой) при частоте тока 50 Гц и частоте вращения n1. КПД генератора при номинальной нагрузке η ном (табл. 4.1). Генератор работает на нагрузку с соs φ ном = 0, 9. Требуется определить активную мощность генератора при номинальной нагрузке Рном, ток в обмотке статора I1ном, требуемую первичному двигателю мощность Р1 и вращающий момент М1 при непосредственном механическом соединении валов генератора и первичного двигателя.
Таблица 4.1
Задача 4.2. Трехфазный синхронный генератор номинальной мощностью Рном и номинальным (фазным) напряжением U1ф.ном работает с коэффициентом мощности соs φ 1ном = 0, 8 (инд.). Обмотка фазы статора имеет индуктивное сопротивление рассеяния х1 (табл. 4.2), отношение короткого замыкания ОКЗ = 0, 7. Требуется построить практическую диаграмму ЭДС и по ней определить номинал Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 1100; Нарушение авторского права страницы
 на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя. . Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление
. Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление  . На обмотку полюсов напряжение управления
. На обмотку полюсов напряжение управления  , (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
, (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
 обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени
обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени  . Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.
. Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.


 А, если общая нагрузка равна сумме номинальных мощностей этих трансформаторов (Sобщ = SномI + SномII + SномIII );
А, если общая нагрузка равна сумме номинальных мощностей этих трансформаторов (Sобщ = SномI + SномII + SномIII );  10-3
10-3


