
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
U–образные и рабочие характеристики синхронного двигателя
U-образные характеристики. В процессе работы синхронного двигателя в его обмотке статора наводятся ЭДС, сумма которых При неизменном напряжении сети Например, при увеличении тока возбуждения При этом полный ток статора Увеличение тока возбуждения сверх значения Иначе говоря, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок. Асинхронные двигатели, являющиеся наиболее распространенными потребителями электроэнергии, работают с Аналогично синхронному генератору, включенному на параллельную работу с сетью (см. § 21.6), синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 22.5). Рабочие характеристики. Рабочие характеристики синхронного двигателя представляют собой зависимость частоты вращения ротора
Рис. 22.5 U-образные характеристики синхронного двигателя
Рис. 22.6. Рабочие характеристики синхронного двигателя
Вид графика Ток в обмотке статора двигателя Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора (см. § 9.3). В заключение необходимо отметить, что синхронные двигатели по сравнению с асинхронными имеют преимущество, заключающееся в том, что они могут работать с К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения. Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.). Синхронный компенсатор Синхронный компенсатор (СК) представляет собой синхронную машину, предназначенную для генерирования реактивной мощности. Синхронный компенсатор включают в электрическую систему с целью повышения ее коэффициента мощности. Принцип происходящих при этом явлений состоит в том, что необходимую для работы некоторых потребителей реактивную мощность вырабатывает не синхронный генератор, установленный на электростанции, а синхронный компенсатор, установленный в непосредственной близости к потребителю. К числу потребителей переменного тока, требующих значительной реактивной мощности, в первую очередь относятся асинхронные двигатели. На рис. 22.7 показана система, состоящая из синхронного генератора (СГ), повышающего ТрI и понижающего ТрII трансформаторов, линии электропередачи (ЛЭП), потребителя Z и синхронного компенсатора (СК), включенного непосредственно на входе потребителя. Синхронный компенсатор, включенный в сеть, работает как синхронный двигатель без нагрузки
Рис. 22.7. Схема включения синхронного компенсатора (СК) в электрическую систему
Рис. 22.8. Применение синхронного компенсатора для повышения коэффициента мощности сети Для пояснения явлений, связанных с подключением СК к электрической системе, рассмотрим рис. 22.8. При подключении потребителя Z к сети с напряжением
Фазовый сдвиг этого тока относительно напряжения сети приравнять к активной мощности сети после подключения СК: Но так как В некоторых случаях СК работают с недовозбуждением. Необходимость в этом возникает, если ток в системе содержит значительную емкостную составляющую, которая не компенсируется индуктивной составляющей тока потребителей. Обычно степень возбуждения СК регулируют посредством автоматических устройств. Синхронные компенсаторы применяют также для стабилизации напряжения в сети при передаче энергии по линиям большой протяженности. При больших индуктивных нагрузках напряжение в конце линии (у потребителей) оказывается намного меньше, чем в начале; при малых нагрузках, наоборот, под влиянием емкостных сопротивлений линии напряжение в конце линии может даже повышаться по сравнению с напряжением в начале. Если же в конце линии (у потребителей) включить СК, работающий при больших нагрузках с перевозбуждением и при малых нагрузках с недовозбуждением, то это позволит поддерживать напряжение в конце линии практически неизменным. Условия нагревания СК при опережающем токе (при перевозбуждении) более тяжелые, чем при отстающем (при недовозбуждении), поэтому номинальной мощностью компенсатора считают мощность при перевозбуждении. Пример 22.1. Потребитель, включенный в сеть переменного тока напряжением Решение. До включения СК реактивная мощность сети
активная составляющая этого тока После включения СК реактивная мощность уменьшилась до
Таким образом, для повышения коэффициента мощности установки от
При этом активная составляющая тока сети не изменится (
Следовательно, ток в сети после включения СК
Обычно коэффициент мощности увеличивают до 0, 92—0, 95, так как экономия, получаемая от повышения коэффициента мощности до единицы, не оправдывает увеличивающихся расходов, обусловленных возросшей мощностью синхронного компенсатора. Так, если в рассматриваемом примере потребовалось бы увеличить коэффициент мощности в сети до единицы, то пришлось бы применить синхронный компенсатор мощностью 1050 кВ∙ Ар, т. е. почти в два раза больше, чем при Синхронные компенсаторы — это электрические машины большой мощности: от 10 до 160 тыс. кВ∙ А. Выполняют их обычно с горизонтальным расположением вала на напряжение от 6, 6 до 16 кВ, частотой 50 Гц. Число полюсов в СК обычно составляет Вал компенсатора не передает вращающего момента, и поэтому при его расчете учитывают лишь силу тяжести ротора и силу магнитного притяжения. В итоге вал СК по сравнению с валом синхронного двигателя имеет уменьшенное сечение. Это способствует уменьшению габаритов и облегчению СК. Так как вал СК не имеет выступающего конца, то СК сравнительно легко герметизировать с целью применения в нем водородного охлаждения (см. § 19.3). Наиболее важными характеристиками СК являются U-образные характеристики, определяющие основные параметры компенсатора: значения токов в обмотке статора и в обмотке возбуждения. В принципе эти характеристики не отличаются от U-образной характеристики синхронного двигателя в режиме х.х. ( Синхронный компенсатор не несет активной нагрузки (его электромагнитная мощность Контрольные вопросы. 1. Чем ограничивается область устойчивой работы синхронного двигателя? 2. Объясните процесс пуска синхронного двигателя? 3. Как регулируется коэффициент мощности синхронного двигателя? 4. Каково назначение синхронного компенсатора? 5. Каковы достоинства и недостатки синхронных двигателей по сравнению с асинхронными?
Глава 23 • Синхронные машины специального назначения Популярное:
|
Последнее изменение этой страницы: 2017-03-09; Просмотров: 2134; Нарушение авторского права страницы
 [см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети
[см. (20.29)] приблизительно равна подведенному к обмотке статора напряжению сети  . Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения
. Эта сумма ЭДС эквивалентна результирующему магнитному полю, вызванному действием двух магнитодвижущихся сил: возбуждения  и статора
и статора  .
. результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения
результирующее магнитное поле постоянно. Поэтому при изменении МДС возбуждения  (изменении тока возбуждения
(изменении тока возбуждения  ) МДС статора
) МДС статора  изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС
изменяется таким образом, чтобы их совместное действие оставалось неизменным, т. е. чтобы оставалось неизменным результирующее магнитное поле синхронного двигателя. Это изменение МДС  может происходить только за счет изменения величины и фазы тока статора
может происходить только за счет изменения величины и фазы тока статора  , т. е. за счет изменения реактивной составляющей тока статора
, т. е. за счет изменения реактивной составляющей тока статора  .
. возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети
возрастает МДС ротора, при этом МДС статора уменьшается. Это уменьшение МДС происходит при уменьшении индуктивной (по отношению к напряжению сети  ) составляющей тока статора
) составляющей тока статора  уменьшается, а коэффициент мощности двигателя
уменьшается, а коэффициент мощности двигателя  , увеличивается. При некотором значении тока возбуждения
, увеличивается. При некотором значении тока возбуждения  индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным
индуктивная составляющая тока статора падает до нуля. При этом ток статора достигнет минимального (при данной нагрузке) значения, так как станет чисто активным  , а коэффициент мощности,
, а коэффициент мощности,  , но теперь этот ток будет опережающим (емкостным) по отношению к напряжению
, но теперь этот ток будет опережающим (емкостным) по отношению к напряжению  . Таким образом, при недовозбужденш
. Таким образом, при недовозбужденш  синхронный двигатель работает с отстающим током, а при перевозбуждении
синхронный двигатель работает с отстающим током, а при перевозбуждении  — с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения
— с опережающим. Зависимость тока статора от тока возбуждения для синхронного двигателя представлена U-образными характеристиками (рис. 22.5). Ток возбуждения  < 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с
< 1, создавая в сетях значительные индуктивные токи. Если же параллельно группе асинхронных двигателей включить один или несколько синхронных двигателей, работающих с перевозбуждением, то возникающая в сети емкостная составляющая тока будет частично или полностью компенсировать индуктивную составляющую тока, обусловленную работой асинхронных двигателей. При этом электрическая система, разгруженная от реактивных токов, будет работать, с  , что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с
, что способствует уменьшению потерь электроэнергии. Необходимо, однако, отметить, что при перевозбуждении синхронный двигатель потребляет значительный ток статора. Поэтому синхронные двигатели, предназначенные для работы с перевозбуждением, имеют несколько большие габариты, а их КПД меньше, чем у двигателей, предназначенных для работы с  , потребляемой мощности
, потребляемой мощности  , полезного момента
, полезного момента  , коэффициента мощности
, коэффициента мощности  от полезной мощности двигателя
от полезной мощности двигателя  (рис. 22.
(рис. 22.  ). Частота вращения ротора
). Частота вращения ротора  , поэтому график
, поэтому график  имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя
имеет вид прямой, параллельной оси абсцисс. Полезный момент на валу синхронного двигателя  . Так как рабочие характеристики снимают при условии
. Так как рабочие характеристики снимают при условии  , то график
, то график  имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя
имеет вид прямой, выходящей из начала координат. Мощность на входе двигателя  . С ростом нагрузки на валу двигателя увеличиваются также и потери
. С ростом нагрузки на валу двигателя увеличиваются также и потери  , поэтому потребляемая мощность
, поэтому потребляемая мощность  растет быстрее полезной мощности
растет быстрее полезной мощности  имеет несколько криволинейный вид.
имеет несколько криволинейный вид.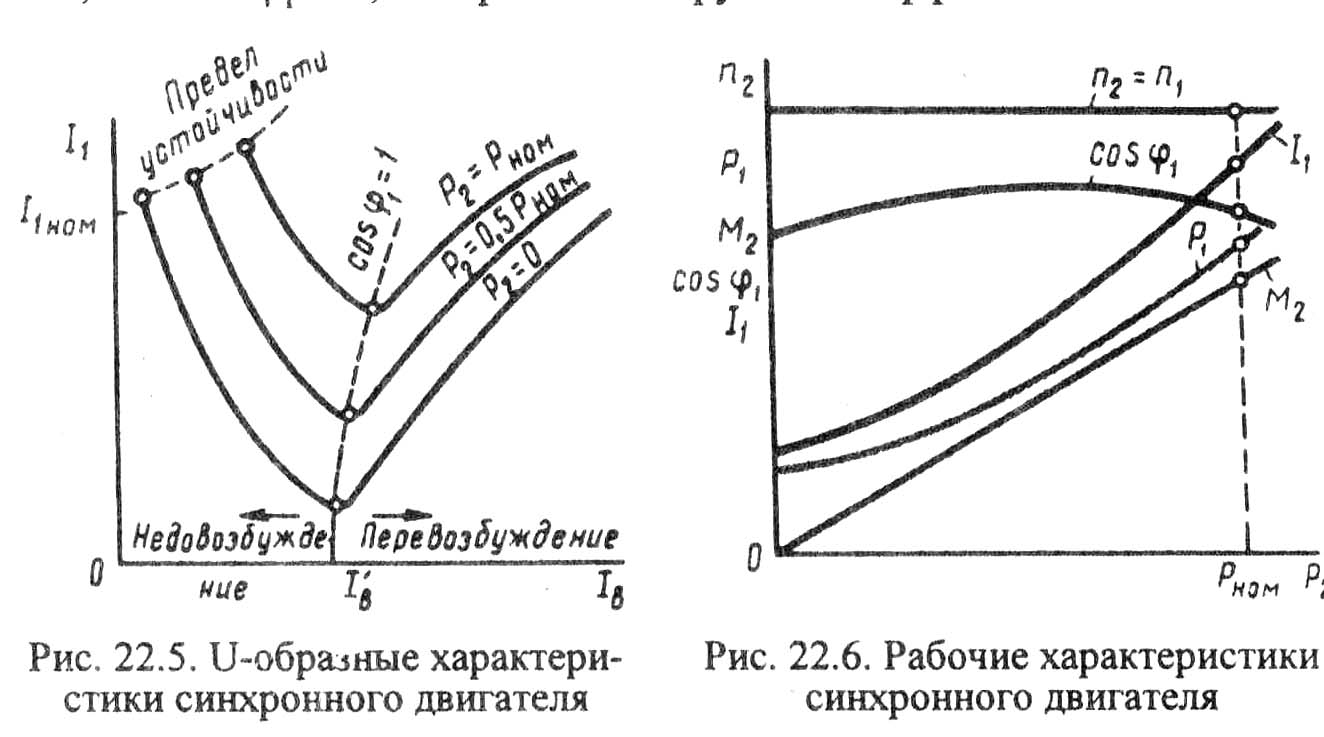
 зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что
зависит от вида настройки тока возбуждения: если в режиме х. х. ток возбуждения установлен таким, что  = 1, то с ростом нагрузки коэффициент мощности снижается, если же установить
= 1, то с ростом нагрузки коэффициент мощности снижается, если же установить  и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети.
и двигатель будет потреблять из сети опережающий по отношению к напряжению сети ток, что приведет к повышению коэффициента мощности этой сети. В этом отношении синхронные двигатели выгодно отличаются от асинхронных, работающих с отстающим по фазе током (особенно при недогрузке двигателя) и снижающих энергетические показатели питающей сети. . Из этого выражения видно, что ток
. Из этого выражения видно, что ток  , а у асинхронных двигателей электромагнитный момент пропорционален
, а у асинхронных двигателей электромагнитный момент пропорционален  [см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные.
[см. (13.14)]. По этой причине при понижении напряжения в сети синхронные двигатели сохраняют большую перегрузочную способность, чем асинхронные. , т. е. в режиме х. х., и при вырабатывает реактивную мощность
, т. е. в режиме х. х., и при вырабатывает реактивную мощность  , необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения
, необходимую для работы потребителя Z, например группы асинхронных двигателей. Благодаря этому реактивная мощность в СГ и ЛЭП доведена до некоторого минимального значения  . Это способствует повышению технико-экономических показателей всей электрической системы.
. Это способствует повышению технико-экономических показателей всей электрической системы.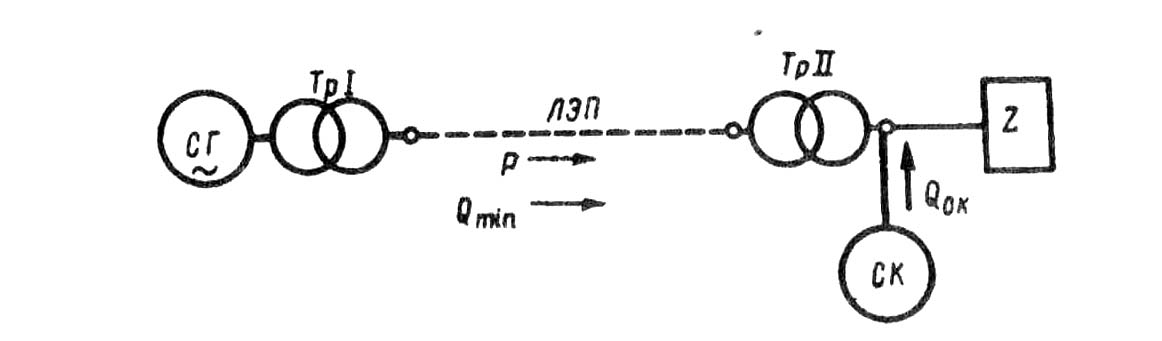
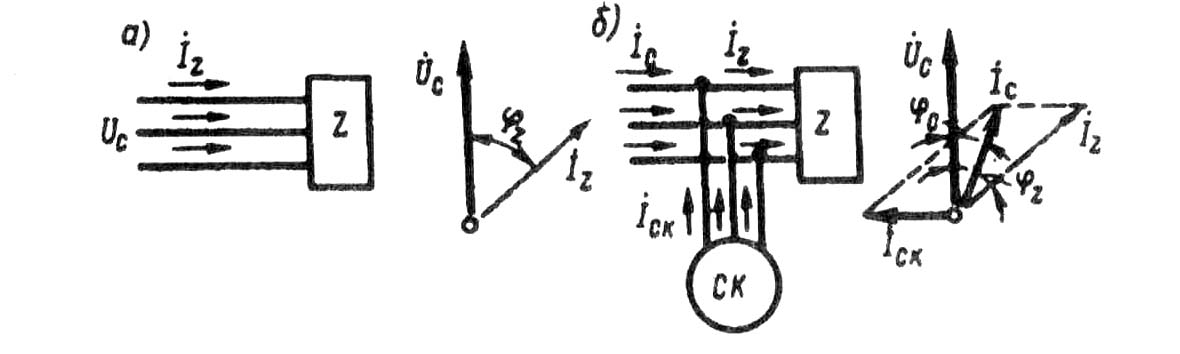
 ) в сети возникает ток
) в сети возникает ток  , отстающий по фазе от напряжения
, отстающий по фазе от напряжения  на угол
на угол  , обусловленный значительной индуктивной составляющей тока
, обусловленный значительной индуктивной составляющей тока  . При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8,
. При подключении СК параллельно потребителю Z и создании в СК режима перевозбуждения (рис. 22.8,  , опережающий по фазе напряжение
, опережающий по фазе напряжение  на угол 90°. Результирующий ток в сети
на угол 90°. Результирующий ток в сети (22.1)
(22.1) (угол
(угол  ) намного меньше угла фазового сдвига до включения СК (угол
) намного меньше угла фазового сдвига до включения СК (угол  ). Кроме того, ток
). Кроме того, ток  станет меньше
станет меньше  . В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК
. В этом можно убедиться исходя из следующих соображений. Так как СК работает без нагрузки на валу, то его активная мощность не велика и определяется потерями х.х. в компенсаторе. Пренебрегая этими потерями, можно активную мощность в сети до подключения СК (22.2)
(22.2) (22.3)
(22.3) , а
, а  , то
, то  . В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются.
. В результате синхронный генератор и линия электропередачи разгружаются, и потери мощности в них уменьшаются. = 6, 3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности
= 6, 3 кВ, потребляет мощность 1500 кВ·А при коэффициенте мощности  = 0, 7. Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до
= 0, 7. Определить мощность синхронного компенсатора, необходимого для повышения коэффициента мощности в сети до  = 0, 95 (
= 0, 95 (  = 0, 31). Определить также силу тока нагрузки в сети до и после компенсации.
= 0, 31). Определить также силу тока нагрузки в сети до и после компенсации. кВ∙ Ар, ток нагрузки в сети
кВ∙ Ар, ток нагрузки в сети А;
А;  А.
А. кВ∙ Ар.
кВ∙ Ар. = 0, 7 до
= 0, 7 до  = 0, 95 требуется включить СК мощностью
= 0, 95 требуется включить СК мощностью кВ∙ Ар.
кВ∙ Ар. = 97 А), а реактивная составляющая этого тока станет равной
= 97 А), а реактивная составляющая этого тока станет равной А.
А. А.
А. = 0, 95.
= 0, 95. = 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой.
= 6 и 8, что соответствует частоте вращения ротора 1000 и 750 об/мин. В синхронных компенсаторах современных серий применен асинхронный пуск, поэтому ротор СК снабжен пусковой клеткой. = 0). Указанные характеристики строят для разных напряжений сети.
= 0). Указанные характеристики строят для разных напряжений сети. ) и работает при значении угла
) и работает при значении угла  , что обеспечивает СК большую перегрузочную способность.
, что обеспечивает СК большую перегрузочную способность.