|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Б.И. Коновалов, Ю.М. ЛебедевСтр 1 из 5Следующая ⇒
Б.И. Коновалов, Ю.М. Лебедев
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебное методическое пособие
Томск — 2010
Министерство образования и науки Российской Федерации
ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР) Кафедра промышленной электроники (ПРЭ)
Б.И. Коновалов, Ю.М. Лебедев ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Учебное методическое пособие
Рецензент: доцент кафедры компьютерных систем управления и проектирования Томского государственного университета систем управления и радиоэлектроники Карпов А.Г. Корректор: Осипова Е.А. Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления: Учебное методическое пособие. — Томск: Факультет дистанционного обучения ТУСУР, 2010. — 63 с.
Приводятся рекомендации по выполнению контрольных и лабораторных работ. Рассмотрены примеры решения задач по анализу типовых звеньев САУ, преобразованию структурных схем, теории устойчивости и последовательной коррекции САУ, варианты выполнения лабораторных работ в пакете «ASIMEC». Учебное пособие предназначено для студентов специальности 210106 «Промышленная электроника», обучающихся на всех формах обучения с использованием дистанционных образовательных технологий.
Ó Коновалов Б.И., Лебедев Ю.М., 2010 Ó Факультет дистанционного обучения ТУСУР, 2010 ОГЛАВЛЕНИЕ
1 Введение. 5 2 Список рекомендуемой литературы.. 5 3 Общие сведения о практических работах по теории автоматического управления 6 4 Примеры решения задач к контрольной работе. 7 5 Лабораторные работы.. 27 5.1 Краткое описание системы моделирования электронных схем ASIMEC 27 5.1.1 Назначение и состав системы ASIMEC.. 27 5.1.2 Проведение измерений при временном анализе. 28 5.1.3 Проведение измерений при частотном анализе. 32 5.2 Основы электронного моделирования. 35 5.3 Лабораторная работа № 1. Моделирование и исследование характеристик типовых динамических звеньев систем автоматического управления. 37 5.3.1 Исследование инерционного звена. 39 5.3.2 Исследование инерционного форсирующего звена. 40 5.3.3 Исследование звеньев второго порядка. 42 5.3.4 Контрольные вопросы.. 43 5.4 Лабораторная работа № 2. Исследование статических и астатических систем автоматического управления 44 5.4.1 Исследование статической САУ.. 47 5.4.2 Исследование астатической САУ.. 50 5.4.3 Контрольные вопросы.. 51 5.5 Лабораторная работа № 3. Последовательная коррекция систем автоматического управления 52 5.5.1 Исследование характеристик нескорректированной САУ.. 57 5.5.2 Исследование характеристик САУ с фильтром.. 59 5.5.3 Исследование характеристик САУ с ПИ-регулятором 59 5.5.4 Исследование характеристик САУ с ПИД-регулятором 60 5.5.5 Контрольные вопросы.. 62 6 Компьютерный экзамен по теории автоматизированного управления. 63
1 Введение
Теория автоматического управления (ТАУ) является одной из наиболее важных общетехнических дисциплин, её изучение опирается на ряд фундаментальных общеобразовательных и общетехнических дисциплин — высшей математики, информатики, теоретических основ электротехники и так далее. Без знания этих наук будет весьма сложно освоить курс ТАУ. Основная задача настоящего учебного методического пособия — на конкретных примерах и задачах научить студента практическому применению приемов и методов, применяемых при анализе и синтезе систем автоматического управления (САУ). Приобретение этих навыков необходимо при использовании полученных знаний при изучении ряда специальных дисциплин, таких как «Аналоговая схемотехника», «Методы анализа и расчета электронных схем», «Энергетическая электроника» и т.д., а также для решения дальнейших практических задач. При изучении настоящего учебного методического пособия необходимо изучить и проработать ученое пособие по ТАУ, а также (по возможности) и другие литературные источники. Список рекомендуемой литературы
1. Деч Г. Руководство к практическому применению преобразования Лапласа и Ерофеев А.А. Теория автоматического управления. — СПб.: Политехника, 2002. — 302 с. Душин С.В., Зотов М.С., Имаев Д.Х. и др. Теория автоматического управления / Под ред. В.Б. Яковлева. — М.: Высшая школа, 2005. — 567 с. 4. Коновалов Б.И., Лебедев Ю.М. Теория автоматического управления: Учебное пособие. — Томск: Томский межвузовский центр дистанционного образования, 2004. — 240 с. Макаров И.М., Менский Б.М. Линейные автоматические системы (элементы теории, методы расчета и справочный материал). — 2-е изд., доп. и перераб. — М.: Машиностроение, 1982. — 504 с. Математические основы теории автоматического регулирования: В 2 т. / Под ред. проф. Б.К. Чемоданова. — М.: Высшая школа, 1977. Попов Е.П. Теория линейных систем автоматического регулирования и управления. — М.: Наука, 1989. — 304 с. Лабораторные работы выполняются в среде ASIMEC, целью лабораторного цикла является углубление знаний по различным разделам курса ТАУ, овладение практическими навыками исследования, обработки полученных результатов и формулирование выводов по результатам исследования. Первая лабораторная работа посвящена исследованию характеристик типовых звеньев САУ, вторая — исследованию характеристик статических и астатических САУ, третья — последовательной коррекции САУ. Каждая лабораторная работа выполняется индивидуально в соответствии с вариантом исходных данных, рассчитанным по общим правилам выбора варианта для студентов дистанционной формы обучения. Результатом выполнения лабораторной работы является отчет по ней, выполненный в виде текстового файла, в котором приведены схемы электронных моделей, таблицы полученных результатов, графики зависимостей, построенные по этим таблицам, выводы, сделанные на основании этих зависимостей, и ответы на контрольные вопросы. Для построения графиков может быть использована любая графическая среда с применением интерполяции, например Microsoft Excel, MathCAD и т.д. Отчёт по работе пересылается по электронной почте, и, после проверки правильности выполнения, студент получает зачет по данной лабораторной работе.
Примеры решения задач к контрольной работе
Пример 4.1. Определить передаточную функцию пассивного четырехполюсника, электрическая схема которого приведена на рис. 4.1, при Решение Процессы в четырехполюснике описываются системой из трех уравнений. Первое уравнение составляется по первому закону Кирхгофа, например для узла 1, а два других уравнения — по второму закону Кирхгофа, например для контуров I и II (рис. 4.1). В данном случае эта система будет иметь вид:
Выходное напряжение четырехполюсника определится уравнением
С учетом (4.2) и того, что при нулевых начальных условиях запись системы уравнений (4.1) в операторной форме будет иметь вид:
Систему линейных алгебраических уравнений (4.3) можно решить любым способом, например путем подстановки, методами линейной алгебры и т.д. Наиболее быстрый результат дает метод подстановки, в соответствии с которым из второго уравнения системы (4.3) выразим переменную
Подставляя (4.4) в третье уравнение системы (4.3), получим:
Или
Отсюда
В соответствии с определением передаточная функция четырехполюсника выразится соотношением
Обозначим
Тогда
Представим полином, расположенный в числителе передаточной функции, в виде Тогда эквивалентные постоянные времени форсирующих звеньев Таким образом, при заданных параметрах элементов, пассивный четырехполюсник можно представить последовательным соединением пропорционального звена, двух форсирующих звеньев и колебательного звена. Его передаточная функция может быть записана в виде:
Ответ: два форсирующих; колебательное;
Пример 4.2. Определить передаточную функцию активного четырехполюсника, выполненного на операционных усилителях
Решение На усилителе DA1 реализовано инерционное звено с передаточной функцией
Таким образом, четырехполюснику, показанному на рис. 4.2, а, будет соответствовать структурная схема, приведенная на рис. 4.2, б. В соответствии с правилами преобразования структурных схем получим
Следовательно, четырехполюсник состоит из пропорционального звена с коэффициентом передачи
Ответ: Пример 4.3. Пользуясь правилами преобразования структурных схем, определить передаточную функцию устройства, структурная схема которого изображена на рис. 4.3, а, и ее параметры, если Решение Проведение преобразований структурной схемы, приведенной на рис. 4.3, а, удобнее начать с переноса сумматора 2 назад через звено с передаточной функцией
В результате этого структурная схема приобретает вид, показанный на рис. 4.3, б, причем порядок расположения сумматоров 1 и 2 может быть любым. В результате такого переноса заданная структура получается эквивалентной последовательному соединению звеньев с передаточными функциями
где причём
Таким образом, устройство, структурная схема которого задана на рис. 4.3, а, эквивалентно инерционному форсирующему звену с передаточной функцией
где
Ответ: Пример 4.4. Передаточная функция разомкнутой цепи САУ имеет вид Решение Согласно заданной передаточной функции САУ содержит два интегрирующих, два форсирующих и три инерционных звена. Определим частоты сопряжения (в декадах) на асимптотической ЛАЧХ: Зная наклоны асимптотических ЛАЧХ звеньев, входящих в САУ [2, 4, 5, 7], строим ее асимптотическую ЛАЧХ. При Таким образом, последовательность наклонов асимптотической ЛАЧХ будет такой: В качестве иллюстрации на рис. 4.4 изображена асимптотическая ЛАЧХ САУ.
Ответ: –40; –20; –40; –20; –40; –60 дБ/дек. Пример 4.5. Асимптотическая ЛАЧХ САУ имеет вид, приведенный на рис. 4.5. Восстановить по ней передаточную функцию разомкнутой цепи САУ при условии ее реализации на минимально фазовых звеньях первого порядка.
Решение Наклоны асимптотической ЛАЧХ определяет тип звеньев, входящих в структуру САУ. По заданным значениям В диапазоне частот Таким образом, САУ содержит следующие последовательно соединенные звенья: два дифференцирующих, форсирующее и четыре инерционных и передаточная функция ее разомкнутой цепи будет иметь вид
где коэффициент передачи
а постоянные времени
Ответ: Пример 4.6. Определить значение запаса устойчивости по фазе Решение Заданное звено состоит из двух последовательно соединённых типовых звеньев: инерционного с передаточной функцией
Ответ: Пример 4.7. Оценить устойчивость САУ, структурная схема которой приведена на рис. 4.6, и определить граничное значение её коэффициента передачи (с точностью до десятых) при
Решение Определим передаточную функцию разомкнутой цепи и характеристический полином замкнутой САУ [4, 5, 7]:
где Решение Определим эквивалентную некомпенсируемую постоянную времени
Таким образом, для того чтобы обеспечить требуемое быстродействие, в заданной САУ должны быть скомпенсированы постоянные времени
В качестве некомпенсируемой постоянной времени Введем в заданную САУ последовательное корректирующее устройство с передаточной функцией
Для системы, настроенной на ТО, передаточная функция разомкнутой цепи равна
отсюда передаточная функция корректирующего устройства
т.е. корректирующее устройство представляет собой последовательно соединенные ПИ-регулятор с передаточной функцией
где и однозвенный фильтр с передаточной функцией
где Следует отметить, что система, настроенная на ТО, будет астатической, т.к. ее корректирующее устройство содержит интегрирующее звено, входящее в состав ПИ-регулятора.
Лабораторные работы
Измерение временных интервалов производится аналогично вертикальными маркерами. В этом случае левый маркер подводится к началу временного интервала, интересующего наблюдателя, правый маркер — к его концу. Результаты измерения — в окнах X1, X2, X2—X1.
Рис. 5.5 — Измерения с помощью вертикальных маркеров На рис. 5.5 показан процесс измерения времени переходного процесса при его колебательном характере и установившемся значении Для измерения установившегося значения измеряемой величины может быть применен вольтметр, проградуированный по среднему значению. Таблица 5.1
Цель работы
Целью лабораторной работы является получение навыков разработки электронных моделей типовых динамических звеньев САУ, исследование их частотных и переходных характеристик на этих моделях. Такими звеньями, в частности, являются инерционное, инерционное форсирующее, а также звенья второго порядка (колебательное и апериодическое).
Методика проведения экспериментальных исследований
Экспериментальные исследования характеристик типовых звеньев САУ проводятся в среде ASIMEC. Электронные модели звеньев выполняются на основе операционных усилителей (см. табл. 5.1). Некоторые особенности схем электронных моделей определяются использованием инвертирующего входа операционных усилителей. Если в модели между входом и выходом содержится нечетное количество усилителей, то выходной сигнал дополнительно сдвигается на 180° относительно сигнала объекта, подлежащего исследованию. Поэтому схемы моделей в прямой цепи между входом и выходом обязательно должны содержать чётное количество усилителей, то есть при проведении экспериментальных исследований с моделями, приведенными в табл. 5.1, необходимо последовательно включать еще одну схему пропорционального звена с единичным коэффициентом передачи (инвертор напряжения). На рис. 5.8 приведена схема подключения приборов и источников напряжения к электронной модели какого-либо из указанных выше типовых звеньев (условно назовем ее лабораторной установкой). Вход этой установки через ключ
Управление режимами работы лабораторной установки осуществляется с помощью ключей Программа работы Программа работы Цель работы
Программа работы
Популярное: |
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1087; Нарушение авторского права страницы
 -преобразования. — М.: ГИФМЛ, 1971. — 288 с.
-преобразования. — М.: ГИФМЛ, 1971. — 288 с.  Ом,
Ом,  Ом,
Ом,  мкФ,
мкФ,  мГн, типовые динамические звенья, входящие в структуру этого четырехполюсника, и параметры этих звеньев.
мГн, типовые динамические звенья, входящие в структуру этого четырехполюсника, и параметры этих звеньев.
 (4.1)
(4.1) , отсюда
, отсюда (4.2)
(4.2)
 ,
,  ,
,  ,
,  ,
,  (4.3)
(4.3) , подставим полученное соотношение в первое уравнение, найдем
, подставим полученное соотношение в первое уравнение, найдем  и подставим его в третье уравнение, т.е.
и подставим его в третье уравнение, т.е.  ,
,  ,
,  . (4.4)
. (4.4)
 .
.

 ,
,  ,
,  ,
,  ,
,  ,
,  .
. , для этого найдем корни
, для этого найдем корни  ,
,  уравнения
уравнения  . В соответствии с правилами решения квадратных уравнений
. В соответствии с правилами решения квадратных уравнений  , отсюда
, отсюда  с–1,
с–1,  с–1.
с–1.  с,
с,  с. Кроме этого, в четырехполюснике имеется звено второго порядка с передаточной функцией
с. Кроме этого, в четырехполюснике имеется звено второго порядка с передаточной функцией  , коэффициент передачи и постоянные времени которого
, коэффициент передачи и постоянные времени которого  ,
,  с,
с,  с. Определим коэффициент демпфирования этого звена
с. Определим коэффициент демпфирования этого звена  . Так как
. Так как  , звено второго порядка является колебательным.
, звено второго порядка является колебательным. .
. ;
;  с;
с;  с;
с;  с;
с;  .
. (рис. 4.2, а), и её параметры при
(рис. 4.2, а), и её параметры при 
 кОм,
кОм,  кОм,
кОм,  кОм,
кОм,  мкФ,
мкФ,  мкФ.
мкФ. . На усилителе DA2 также реализовано инерционное звено. Этот усилитель является суммирующим, поэтому на его выходе воспроизводится сигнал, соответствующий сумме сигналов, проходящих через звенья с передаточными функциями
. На усилителе DA2 также реализовано инерционное звено. Этот усилитель является суммирующим, поэтому на его выходе воспроизводится сигнал, соответствующий сумме сигналов, проходящих через звенья с передаточными функциями  и
и 
 . На усилителе DA3 реализовано пропорциональное звено с передаточной функцией
. На усилителе DA3 реализовано пропорциональное звено с передаточной функцией  .
.

 , форсирующего звена с постоянной времени
, форсирующего звена с постоянной времени  с и двух инерционных звеньев с постоянными времени
с и двух инерционных звеньев с постоянными времени  с и
с и  с, то есть его передаточная функция имеет вид:
с, то есть его передаточная функция имеет вид:  .
. ;
;  ;
;  с;
с;  с;
с;  с.
с.  ,
,  ,
,  ,
,  , где
, где  ,
,  ,
,  ,
,  ,
,  с.
с.  . В соответствии с правилами преобразования структурных схем [2, 4, 5, 7], при осуществлении этой операции передаточную функцию
. В соответствии с правилами преобразования структурных схем [2, 4, 5, 7], при осуществлении этой операции передаточную функцию  нужно поделить на передаточную функцию
нужно поделить на передаточную функцию 
 и
и  (см. рис. 4.3, в), причем передаточная функция
(см. рис. 4.3, в), причем передаточная функция  и
и  , а передаточная функция
, а передаточная функция  . Тогда
. Тогда 
 ,
, 
 .
. 
 .
. ;
;  ;
;  ;
;  .
.  , где
, где  ,
,  с,
с,  с,
с,  с,
с,  с,
с,  с. Определить последовательность наклонов участков асимптотической ЛАЧХ САУ.
с. Определить последовательность наклонов участков асимптотической ЛАЧХ САУ.  дек;
дек;  дек;
дек;  дек;
дек;  дек;
дек;  дек.
дек.  ЛАЧХ будет проходить через значение
ЛАЧХ будет проходить через значение 
 дБ с наклоном –40 дБ/дек (он обусловлен присутствием двух интегрирующих звеньев, для каждого из которых ЛАЧХ имеет наклон –20 дБ/дек на любой частоте). На интервале
дБ с наклоном –40 дБ/дек (он обусловлен присутствием двух интегрирующих звеньев, для каждого из которых ЛАЧХ имеет наклон –20 дБ/дек на любой частоте). На интервале  «включается» первое форсирующее звено с постоянной времени
«включается» первое форсирующее звено с постоянной времени  , благодаря которому наклон ЛАЧХ на этом интервале частот будет равен
, благодаря которому наклон ЛАЧХ на этом интервале частот будет равен  дБ/дек. На частоте
дБ/дек. На частоте  вступает в действие инерционное звено с постоянной времени
вступает в действие инерционное звено с постоянной времени  и наклон ЛАЧХ на интервале
и наклон ЛАЧХ на интервале  становится равным
становится равным  дБ/дек. При
дБ/дек. При  «включается» второе форсирующее звено с постоянной времени
«включается» второе форсирующее звено с постоянной времени  , и на интервале
, и на интервале  наклон ЛАЧХ снова становится равным
наклон ЛАЧХ снова становится равным  дБ/дек. На интервалах
дБ/дек. На интервалах  и
и  вступают в действие инерционные звенья с постоянными времени
вступают в действие инерционные звенья с постоянными времени  и
и  , наклон ЛАЧХ становится равным
, наклон ЛАЧХ становится равным  дБ/дек соответственно.
дБ/дек соответственно.  дБ/дек.
дБ/дек. 
 рассчитаем частоты сопряжения, соответствующие постоянным времени звеньев:
рассчитаем частоты сопряжения, соответствующие постоянным времени звеньев:  ,
,  ,
,  ,
,  ,
,  .
.  на 20 дБ соответственно обусловлено действием еще двух инерционных звеньев.
на 20 дБ соответственно обусловлено действием еще двух инерционных звеньев.  ,
,  определится из уравнения
определится из уравнения  , отсюда
, отсюда ,
,  с,
с,  с,
с,  с,
с,  с,
с,  с.
с.  ;
;  с;
с;  с;
с;  с.
с.  (w) на частоте среза
(w) на частоте среза  для звена с передаточной функцией
для звена с передаточной функцией  при
при  ,
,  с,
с,  с (ответ привести в градусах с точностью до десятых).
с (ответ привести в градусах с точностью до десятых).  и форсирующего с передаточной функцией
и форсирующего с передаточной функцией  . По определению, частотой среза называется частота, на которой амплитуда выходного сигнала равна единице. Для указанных последовательно соединённых звеньев амплитудно-частотные характеристики (АЧХ), равно как и передаточные функции, перемножаются, т.е. амплитуда выходного сигнала на частоте среза
. По определению, частотой среза называется частота, на которой амплитуда выходного сигнала равна единице. Для указанных последовательно соединённых звеньев амплитудно-частотные характеристики (АЧХ), равно как и передаточные функции, перемножаются, т.е. амплитуда выходного сигнала на частоте среза 
 , или
, или 
 , отсюда частота среза
, отсюда частота среза  рад/с. Поскольку фазовые характеристики последовательно соединённых звеньев складываются, т.е.
рад/с. Поскольку фазовые характеристики последовательно соединённых звеньев складываются, т.е. 
 , то фаза на частоте среза (в радианах)
, то фаза на частоте среза (в радианах)  , тогда запас устойчивости по фазе
, тогда запас устойчивости по фазе  .
. .
.  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  с,
с,  с,
с,  .
. 
 — коэффициент передачи разомкнутой цепи САУ.
— коэффициент передачи разомкнутой цепи САУ. [4], исходя из условия
[4], исходя из условия с.
с. компенсации не подлежат.
компенсации не подлежат.
 примем такую, величина которой не превышает рассчитанного значения
примем такую, величина которой не превышает рассчитанного значения  .
.  (см. рис. 4.9). Передаточная функция разомкнутой цепи скорректированной системы будет равна
(см. рис. 4.9). Передаточная функция разомкнутой цепи скорректированной системы будет равна
 , т.е. для заданной САУ должно выполняться равенство:
, т.е. для заданной САУ должно выполняться равенство:  ,
,  ,
,  ,
,  ,
,  с,
с,  ,
,  с и
с и  с.
с.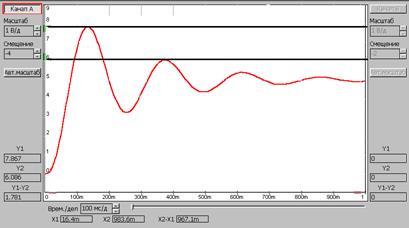 Рис. 5.4 — Измерения с помощью горизонтальных маркеров
Рис. 5.4 — Измерения с помощью горизонтальных маркеров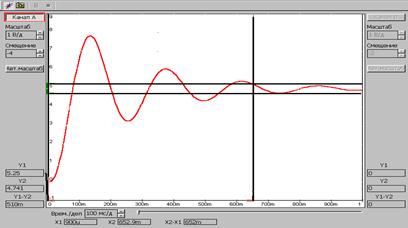
 В. Здесь с помощью горизонтальных маркеров выделена зона
В. Здесь с помощью горизонтальных маркеров выделена зона  % от установившегося значения
% от установившегося значения  (уровни, приблизительно равные 5, 25 и 4, 75 В в окнах Y1 и Y2). Левый вертикальный маркер располагается в начале координатной сетки, а правый маркер — в точке пересечения уровня 5, 25 В и участка осциллограммы, после которого переходный процесс считается закончившимся (переходная характеристика располагается внутри зоны
(уровни, приблизительно равные 5, 25 и 4, 75 В в окнах Y1 и Y2). Левый вертикальный маркер располагается в начале координатной сетки, а правый маркер — в точке пересечения уровня 5, 25 В и участка осциллограммы, после которого переходный процесс считается закончившимся (переходная характеристика располагается внутри зоны 












 ;
;

 ;
;

 (он находится в «ящике» Устройства коммутации ) подключен к положительному полюсу источника постоянного напряжения
(он находится в «ящике» Устройства коммутации ) подключен к положительному полюсу источника постоянного напряжения  , а через ключ
, а через ключ  — ко входу плоттера Боде. Для удобства измерения выходного напряжения
— ко входу плоттера Боде. Для удобства измерения выходного напряжения  электронной модели величина напряжения источника устанавливается исходя из соотношения
электронной модели величина напряжения источника устанавливается исходя из соотношения  , где
, где  В.
В.