|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Архитектура микропроцессорных систем.
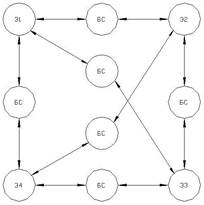
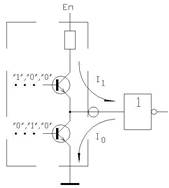
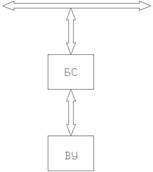
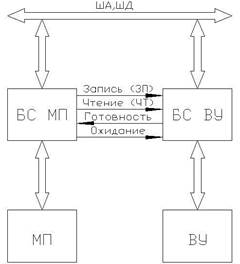
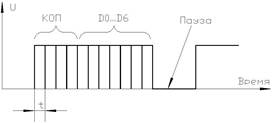
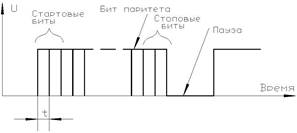
Введение Данное учебное пособие, включая лабораторный практикум, рекомендуется при изучении основных принципов построения и функционирования микропроцессорных систем управления технологическими объектами производства электронно-вычислительных средств (ЭВС). Предлагаемые работы лабораторного практикума связаны между собой единым заданием, обеспечивают закрепление теоретических знаний, а также приобретение практических навыков разработки и отладки программного обеспечения и аппаратных средств вышеуказанных микропроцессорных систем. Они базируются на использовании промышленного учебного микропроцессорного комплекта (УМК) на основе микропроцессора 580 серии и рассчитаны на использование персональных ЭВМ, для которых есть соответствующее кросс-обеспечение. В зависимости от объема часов, выделяемых для лабораторных работ и практических занятий, наличия курсового проекта по данной дисциплине, состава лабораторного комплекса, характера специализации студентов возможны различные варианты составления заданий и цикла работ, предусматриваемых данным пособием. Разнообразие заданий ограничивается только имеющимся в наличии набором проблемных модулей, входящим в лабораторный комплекс. Главное внимание уделяется иллюстрации возможностей микропроцессорной техники, знакомству со специфическими особенностями деятельности инженера при разработке и отладке микропроцессорных систем управления технологическими объектами. Результатом проделанной работы студента является реально действующая микропроцессорная система, что резко улучшает осознание им основных положений изучаемой проблемной области, ее аспектов и граней. Данное пособие может служить методическим руководством молодому специалисту в его конкретной деятельности на предприятии. Архитектура микропроцессорных систем. Как известно, процессором называется устройство переработки информации. Микропроцессор (МП) - это процессор, выполненный на одной или нескольких больших интегральных схемах (БИС). Микропроцессорной системой (МПС) называется система, центральным элементом которой является микропроцессор. Первоначально появление МП было воспринято скептически: МП рассматривался как измена главной идеи вычислительной техники - создание ЭВМ с максимально возможными вычислительными ресурсами (быстрее, больше памяти, мощнее система команд и др.). Потребовалось время, чтобы осознать, что МП - массовый и дешевый класс вычислительных средств. Соединение МП с любым объектом " интеллектуализирует" последний, поэтому момент появления МП можно назвать научно-технической революцией, отделяющей эру " интеллектуальных" вещей от эры просто вещей. В настоящее время автоматизация технологического процесса с помощью МП в нашей стране низка из-за отсутствия кадров, способных одновременно поставить задачу и реализовать результаты. Необходимым условием применения МП являются следующие компетенции: 1. Знание проблемной области, т.е. тех объектов и процессов, которые подлежат автоматизации (нельзя управлять тем, чего не знаешь, например, процессом получения полиуретана). 2. Владение методами математического моделирования объекта управления (ОУ), так как МП является числовым исполнителем, то есть оперирует числами, а не реальными физическими параметрами. 3. Способность разрабатывать электрические принципиальные схемы, то есть знание методов схемотехнического проектирования и практические навыки применения типовых схемотехнических решений. 4. Умение программировать микропроцессорную технику, так как МП является дуальным объектом: его поведение определяется не только его структурой, но и состоянием памяти. 5. Иметь представление об экономической и технической целесообразности применения МП (например, встраивать в коробку спичек, зажигалку и т.д.). Место конструктора-технолога в разработке МПС. Так как программисты и схемотехники не знают проблемной области, постановку задачи по автоматизации технологического процесса производства ЭВС, разработку математической модели и алгоритма должен осуществлять конструктор-технолог ЭВС. Основная закономерность развития систем. Чтобы сохранить устойчивость (т.е. существовать), рост функциональных возможностей системы должен опережать рост структурной сложности и пространственных размеров. Уменьшение размеров было достигнуто за счет развития физических принципов действия (механический счет, электронно-лучевой, полупроводниковый ток, световой луч) и технологии изготовления (лампы, полупроводниковые приборы, интегральные схемы). Преимущественный рост функциональных возможностей достигнут за счет применения нового принципа реализации секций: если раньше функции однозначно соответствовала структура, реализующая ее (" жесткая" логика), то теперь используется адаптируемая (программируемая) к необходимым функциям, мало изменяемая структура. Т.е. индивидуальность МПС обеспечивается программой. Целесообразность применения МП. Появление МП вызвало замену аппаратной " жесткой" логики программной и снизило порог экономической целесообразности применения электронно-вычислительных средств (ЭВС). МП целесообразно применять, когда: 1) для решения задачи требуется более 20...40 обычных интегральных схем (ИС) (из-за стоимости и надежности); 2) требуется многофункциональность, программируемость системы и предвидится расширение ее функций (иначе возникает трудность ее перепроектирования); 3) система должна взаимодействовать с большим числом внешних устройств (ВУ); 4) требуется обработка и хранение массивов информации (необходим процессор и память); 5) необходимо реализовать сложные алгоритмы управления (иначе возникает сложная структура); 6) нужна высокая точность вычислений (рост разрядности); 7) достаточно быстродействия МП, так как " жесткая" логика более Микропроцессорные комплекты (МПК). Сам МП только " перемалывает" информацию. Для организации законченных вычислительных, контрольно-измерительных или управляющих функций он должен объединяться в систему с другими элементами (память, каналы ввода-вывода, внешние устройства). Таким образом, МПС - это система на базе МП, способная выполнять вышеперечисленные функции. Основной задачей разработки системы является не только выбор элементов, их функций и структуры, но и согласование элементов друг с другом. С целью облегчения труда разработчиков МПС по выбору совместимых элементов разработаны МПК – совокупность информационно-логически, электрически и конструктивно совместимых БИС, выполняющих определенные функции, используемые для построения МПС, способных решать некоторый класс задач. Базовая структура МПС. Для того, чтобы построить микропроцессорную систему, необходимо между разнородными элементами, из которых она будет состоять (процессор(ы), память, канал(ы) ввода-вывода и разнообразные внешние устройства), установить связи, то есть согласовать их внешние свойства (параметры) между собой. Принципом называется способ объединения элементов в систему. Рассмотрим принципы, лежащие в основе построения микропроцессорных систем. Их всего пять. 1. Принцип магистральности. 2. Принцип модульности. 3. Принцип третьего состояния. 4. Принцип секционности. 5. Принцип микропрограммируемости. Принцип магистральности. Обычно систему элементов обозначают графически так, как показано на рис.1а. Это " затеняет" важнейший факт – выходные внешние свойства элементов разные, следовательно, существует граница (" нечто" ), на которой происходит согласование свойств (параметров) (см. рис.1б). Преобразование свойств (как функция) выполняется только материальным объектом – промежуточным элементом, который называется блоком сопряжения (БС). Поэтому правильно изображать систему из двух элементов так, как показано на рис.1в. В общем случае, при создании системы из N-элементов приходится согласовывать в предельном варианте каждую пару элементов, то есть количество блоков сопряжения и связей между ними растет почти экспоненциально от количества элементов, объединяемых в систему. В результате сложность проектирования системы, значения ее технических характеристик (габариты, вес, потребление и др.) значительно возрастают, что неприемлемо при разработке микро- процессорных систем (см. рис.2).
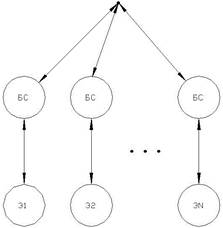
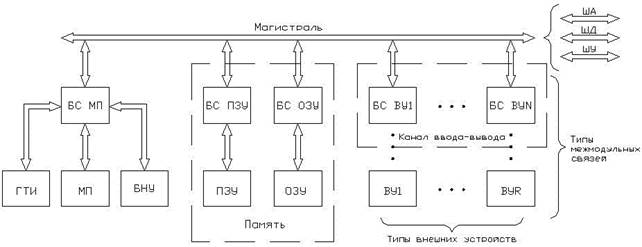
Выход был найден в такой разработке блоков сопряжения, когда они имеют общую (тождественную по характеристикам) для них связь, что позволяет объединить элементы в систему так, как показано на рис.3. Такая общая группа связей для блоков сопряжения называется магистралью, а способ объединения элементов в систему на ее основе - принципом магистральности. При этом достигается выигрыш в снижении сложности проектирования блоков сопряжения и, как следствие, уменьшении энергопотребления и улучшении массогабаритных показателей. Однако, за это приходится платить быстродействием – каждая пара элементов системы может взаимодействовать друг с другом только поочередно. Благодаря этому принципу классическое ЭВС выглядит так, как показано на рис.4. Такая структура является общей для всех микропроцессорных систем (то есть является типом ), поэтому назовем ее базовой структурой МПС.
Рис.4 МП - микропроцессор; ГТИ - генератор тактовых импульсов, БНУ - блок начальной установки; ОЗУ - оперативное запоминающее устройство; ПЗУ - постоянное запоминающее устройство; БС – блок сопряжения; ВУ - внешнее по отношению к МП (но не к МПС) устройство; ША - шины адреса, ШД - шины данных; ШУ - шины управления. Программа обработки данных и необходимые константы хранятся в энергонезависимом ПЗУ, а исходные данные и текущие результаты - в быстром (но дорогостоящем) ОЗУ, теряющем их при исчезновении питания. Различного рода перепрограммируемые и полупостоянные ЗУ в данных условиях следует рассматривать как ПЗУ, так как в процессе работы конкретной программы информация в них не изменяется (за исключением некоторых случаев самообучения, реализуемых электрически репрограммируемыми ПЗУ). Пара " МП - память", по существу, составляет " мозг" МПС. Все остальные элементы предназначены для обеспечения связи с внешним миром. Магистраль в общем случае можно разделить на три группы шин (единичных физических каналов передачи электрических сигналов – проводников ): шины адреса (ША), несущие информацию об адресуемом элементе системы; шины данных (ШД), отвечающие за передачу элементам собственно данных; шины управления (ШУ), синхронизирующие во времени взаимодействие элементов системы и определяющие способ обмена между ними. Конкретная структура соединений между блоками сопряжения (БС ВУi) и внешними устройствами определяется типом межмодульных связей. Типы внешних устройств. Все многообразие ВУ можно разбить на четыре класса, определяющие методы проектирования соответствующих блоков сопряжения. 1. ВУ взаимодействия с человеком. Обеспечивают взаимодействие МПС с пользователем системы (монитор, клавиатура, мышка, принтер и т.д.). Методы проектирования учитывают психофизиологические особенности человека. 2. ВУ как продолжение внутренних свойств системы. Примерами таких устройств являются накопители на магнитных дисках, оптические накопители, специализированные процессоры и многое другое. Методы проектирования основываются на свойствах проектируемой системы. 3. ВУ как объект управления. В этом случае взаимодействие определяется законами управления, что и определяет методы проектирования (любой объект во внешней среде, например, технологическое оборудование). 4. Удаленные ВУ. Их взаимодействие с системой зависит от свойств внешней среды и определяет как канал обмена, так и методы его проектирования (любые внешние устройства системы). Повышение помехозащищенности таких каналов обеспечивается информационным кодированием сигнала, особым электрическим режимом (" токовая петля" ), специальными конструктивными мерами. Все перечисленные типы являются непересекающимися (абстрактными) и встречаются в любых комбинациях в реальных внешних устройствах. Например: принтер – устройство общения с человеком, обладает локальной памятью для хранения печатаемого массива данных, может быть удален на значительные расстояния и имеет встроенные блоки, управляемые системой. Типы блоков сопряжения. По выполняемым функциям, определяющим сложность их проектирования, все блоки сопряжения можно разделить на четыре класса (типа). 1. Адаптер – блок сопряжения, обеспечивающий согласование двух элементов по конкретному параметру (току, напряжению, информационному коду и т.д.). Это - магистральные усилители, повторители, переходные платы и т.д. Простейший адаптер может быть " абсолютно прозрачным", выполняя, например, функцию сопряжения КМОП и ТТЛ уровней микросхем. В этом случае управляющие функции возлагаются на МП. 2. Интерфейс (" внешнее лицо" ) – блок сопряжения, реализующий полное согласование элементов по параметрам (информационно-логически, электрически и конструктивно). 3. Контроллер (управляющее устройство) – блок сопряжения, выполняющий как все функции интерфейса, так и управление обменом информации между элементами (контроллер прямого доступа в память, контроллер магистрали, арбитр шины и др.). 4. Модем (модулятор-демодулятор) – блок сопряжения, обеспечивающий параллельно-последовательное согласование взаимодействия между элементами. Не стоит путать этот термин с названием реального устройства, применяемого в ЭВС, который совмещает одновременно и функции контроллера. Такой блок сопряжения применяется для связи с удаленными устройствами, где требуются дорогостоящие, помехоустойчивые линии, большое количество которых использовать экономически невыгодно для реализации параллельной передачи по шинам адреса, данных и управления. Принцип модульности. Формулируется следующим образом. При построении МПС могут использоваться только такие элементы, которые являются модулями – функционально и конструктивно законченными блоками. Модули должны обрабатывать адресный запрос, обеспечивать прием и/или передачу данных, быть функционально совместимыми с управляющими шинами системы. Тем самым резко сокращаются затраты на схемы сопряжения и уменьшается число линий связи между ними (что объясняется отсутствием информационных потоков, которые всегда присутствуют при взаимодействии пространственно разнесенных блоков, реализующих совместно какую-либо функцию). Обычно для конструктивного оформления и сопряжения модулей выбирается типовая конструкционная система. Принцип третьего состояния. Так как все модули подключены к одной и той же магистрали, они
Рис.5 Принцип секционности. Прямым развитием принципа модульности явилось создание секционных МП и мультимикропроцессорных систем. Если требуется обрабатывать информационные потоки с разрядность большей, чем разрядность шин данных МПС, используются несколько одинаковых МПС, объединенных соответствующими блоками сопряжения, называемыми схемами переноса (переполнения информации). Типы межмодульных связей. Применение МП немыслимо без различных блоков и устройств, являющихся для него внешними: ПЗУ, ОЗУ, пульт управления, средства отображения информации, цифро-аналоговые преобразователи (ЦАП), аналого-цифровые преобразователи (АЦП), принтеры, датчики, исполнительные устройства и прочие модули. Подсоединение ВУ обеспечивается определенной структурой соединений – межмодульными связями.
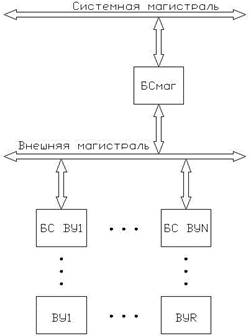
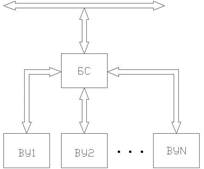
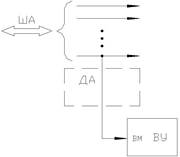
Рис.6 Различают следующие типы межмодульных связей. 1. Магистральный - модуль ВУ через свой блок сопряжения непосредственно подключается к магистрали (рис.6а). К достоинствам такого типа можно отнести независимость ВУ друг от друга, простоту проектирования блока сопряжения, высокую скорость обмена. К недостаткам – каждый ВУ имеет свой блок сопряжения. Данный тип связи применяется при небольшом количестве однородных (например, по быстродействию) ВУ и/или высокой нагрузочной способности магистрали. 2. Магистрально-радиальный – несколько модулей подключаются к магистрали через общий блок сопряжения, взаимодействуя с ним через раздельные каналы связи (см. рис.6б). Достоинства: один блок сопряжения на все ВУ. Недостатки: сложность проектирования блока сопряжения, множество связей между ВУ и БС, более медленный обмен информацией с магистралью. 3. Каскадно-магистральный (рис.6в). В этом случае для взаимодействия с внешними устройствами организуется дополнительная магистраль через блок сопряжения (БСмаг), управляющий обменом информацией через нее, который поэтому является контроллером. Внешние устройства подсоединяются к этой магистрали любым типом межмодульных связей. Таким образом, данный тип межмодульной связи является рекурсивно повторяемым, что позволяет организовать каскады магистралей. Основная магистраль системы, связывающая МП с остальными элементами, носит название системной, а магистраль в каскаде – внешней. Например, в персональных компьютерах к таким магистралям относятся: · видеомагистрали типа AGP, PCIext (соединяющие мониторы через свои блоки сопряжения – видеокарты ); · магистрали IDE, SCSI, SATA (обеспечивающие сопряжение внешних накопителей информации – винчестеры, CD-RW, ZIP-накопители и др. – с системой); · магистрали ISA, VESA, PCI, позволяющие подсоединять к компьютеру любые высокоскоростные внешние устройства; · магистраль ИРПР (LPT) – служит для сопряжения принтеров и других медленных ВУ (например, контроллеров технологических установок); и т.д. Функции средств сопряжения. При проектировании блоков сопряжения существуют следующие трудности: · сложность интерфейсных функций, обусловленных большим разнообразием ВУ и их возможных состояний; · нехватка контактов и потребляемой мощности БИС, на которых они реализуются. Перечислим функции, возлагаемые на блоки сопряжения. 1. Дешифрация (расшифровка) адреса ВУ и, при необходимости, кода команды ВУ. 2. Согласование информационных сигналов по формату и электрическим параметрам. 3. Организация промежуточного хранения информации, предназначенной для вывода (ввода) на (из) ВУ, если в последней отсутствует своя память. Эта необходимость возникает потому, что, как мы видели раньше, обмен информацией между элементами по магистрали поочереден, динамичен и не может быть длительно удержан на ней. 4. Согласование модулей конструктивно: конструкция ВУ и его разъемов должна соответствовать ответной части конструкции системы (на персональных ЭВМ – системного блока). 5. Организация (или реализация) взаимодействия между ВУ и системой при различных способах организации связи – системе действий элементов при взаимодействии с друг другом. Так как проектирование системы есть проектирование блоков сопряжения, рассмотрим ниже последовательно, как проектируются блоки сопряжения для различных типов ВУ. Методы адресации элементов. Элемент, управляющий обменом информацией по магистрали (микропроцессор, контроллер, сопроцессор), прежде всего должен адресовать тот элемент системы (ВУ), с которым обмен будет происходить. Адресным пространством системы называется количество элементов (ВУ), которое может быть адресовано в системе. Это зависит не столько от разрядности адресных шин магистрали (хотя и это является определяющим), сколько от выбранного метода дешифрации адреса. Блок сопряжения, отвечающий за преобразование адресной информации магистрали в конкретный сигнал выбора элемента системы (по входу " Выбор модуля" – ВМ), называется дешифратором адреса. Различают три основных метода адресации, имеющие много модификаций: линейный метод; прямой метод; расширенный метод. При линейном методе адресации каждому ВУ ставится в соответствие конкретная физическая адресная шина магистрали (см. рис.7). К достоинствам данного метода можно отнести простоту проектирования дешифратора адреса, который представляет собой просто физический проводник. Крупным недостатком метода является малое количество адресуемых ВУ, ограниченное разрядностью адресных шин.
В случае прямого метода каждому внешнему устройству ставится в соответствие логическая комбинация значений сигналов на адресных шинах магистрали (см. рис.8). В этом случае дешифратор адреса представляет собой комбинационную схему, выполняющую преобразование адресной комбинации в конкретный сигнал выбора ВУ. При этом усложняется проектирование дешифратора адреса, но увеличивается количество адресуемых элементов системы.
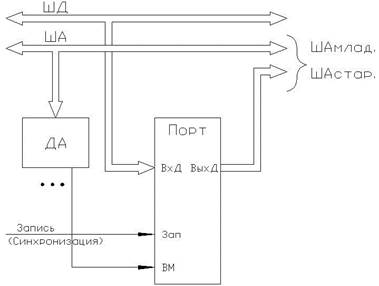
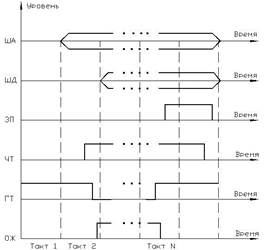
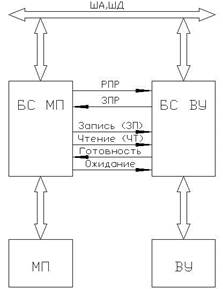
При расширенном методе адресации адресные шины магистрали, используемые при дешифрации адреса любым из трех методов, формируются объединением адресных шин и шин данных системы за счет использования локальной памяти (регистра) в дешифраторе адреса (см. рис.9). Регистр, осуществляющий прием, хранение и выдачу информации, но не преобразующий ее, называется портом (" пристанищем" информации). Адресация выполняется в два этапа. Сначала в регистр (который в этом случае носит название базового, а метод адресации операндов - базированием ) заносится из шин данных старшая адресная комбинация, а затем любое ВУ адресуется комбинацией старшего адреса с базового регистра и младшего адреса с адресных шин магистрали. Такая адресация носит название – дальний вызов, в то время, как адресация только с помощью адресных шин, – ближний вызов. Асинхронный обмен. До сих пор речь шла о синхронном обмене, когда ВУ " успевало" реагировать на команды МП. Если же внешнее устройство достаточно медленное, МП должен дождаться его реакции, иначе обмен будет сорван. Такой обмен с ожиданием реакции ВУ называется асинхронным. Для организации асинхронного обмена необходимо еще две управляющие шины (помимо " Запись" и " Чтение" ): " Готовность" – ВУ сигнализирует МП, что оно готово (или не готово) к обмену; " Ожидание" – МП оповещает ВУ о том, что он его ждет. При этом взаимодействие МП и ВУ выглядит так, как показано на рисунке 19. На рисунке 20 приведен протокол обмена для асинхронного режима. Если ВУ не отвечает, то время ожидания может быть сколь угодно большим. Говорят, что МП " зависает". Такая ситуация недопустима при функционировании МПС и необходимо предусматривать меры для ее предотвращения.
Подводя итог рассмотрению программно-управляемого обмена, можно констатировать, что для его организации необходимо всего четыре управляющие шины: " Запись", " Чтение", " Готовность" и " Ожидание". Его особенностями (достоинствами и недостатками) являются: · минимизация аппаратных затрат на создание блока сопряжения; · значительные затраты времени работы МП по организации обмена с ВУ, особенно в режиме ожидания; · увеличение программных затрат, связанных с взаимодействием с ВУ; · пассивность ВУ, не способных инициировать обмен. Таким образом, этот способ целесообразно использовать в тех случаях, когда быстродействие ВУ сравнимо с быстродействием МП, а управление обменом реализуется программно предельно просто. Обмен по прерываниям. Простота программно-управляемого ввода-вывода оборачивается " бездельем" МП, который почти все время находится в ожидании ввода или вывода. Например, если на принтер выводится информация с быстродействием 1000 символов в секунду, то полезное время работы МП составит всего 0, 1% и менее. При недопустимости такой ситуации требуется обеспечить такой режим работы МП, когда он выполняет две независимые программы, одна из которых - программа управления обменом с ВУ (программно-управляемый обмен) - вызывается только тогда, когда ВУ необходимо выполнить какие-то действия (аварийные, допусковые ситуации и др.). Указанный режим реализуется с помощью механизма прерываний. Данный способ представляет собой расширение " демократии" взаимодействия между элементами в системе и, как следствие, требует дополнительных организационных затрат: аппаратных и программных. Для организации обмена по прерываниям необходимо дополнительно ввести две шины управления: " Запрос прерывания" (ЗПР) – ВУ запрашивает обслуживания у МП, " Разрешение прерывания" (РПР) – МП подтверждает начало обслуживания (рис.21).
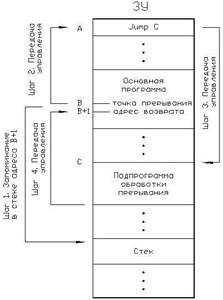
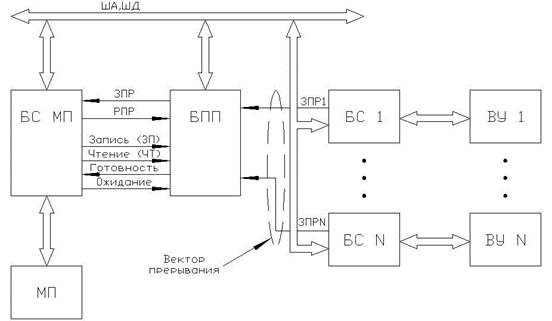
На МП возлагаются следующие функции: · принять сигнал ЗПР; · завершить выполнение текущей команды основной программы; · запомнить в стеке (ОЗУ) адрес следующей для исполнения команды; · передать управление подпрограмме обработки прерывания (обслуживания запроса ВУ); · выдать сигнал РПР. Так как МП не " знает", где в запоминающем устройстве расположена подпрограмма обработки прерывания, он передает управление не ей, а команде ЗУ, расположенной чаще всего по адресу 0 (или любой другой, обусловленной схемотехникой МП). На программиста возлагается задача расположить по этому адресу команду передачи управления подпрограмме обработки запроса ВУ (см. рис.22). Для корректного использования такого способа ввода-вывода между фоновой программой и программой обмена существуют некоторые соглашения. Так как основная программа будет продолжена, подпрограмма обработки прерывания ВУ должна: 1. Запомнить в стеке состояние всех используемых регистров основной программы. 2. Выполнить обмен информацией между МП и ВУ, устранив причину запроса. 3. Восстановить из стека состояние используемых регистров основной программы. 4. Передать управление в основную программу (адрес возврата находится в стеке). МП может иметь несколько входов " Запрос прерывания", часть из которых обычно программно " маскируется" (запрещается или разрешается), а часть – нет (для случаев аварийной ситуации на технологическом объекте, требующей безотлагательного вмешательства). Случай нескольких ВУ. Если предполагается, что несколько ВУ может работать в режиме прерывания, то возникают дополнительные проблемы: · у МП не хватает входов " ЗПР"; · требуется несколько подпрограмм обслуживания прерывания с организацией механизма передачи им управления; · необходимо определить, какое ВУ выдает сигнал " ЗПР"; · при одновременном запросе прерывания от нескольких ВУ нужно выяснить, какое ВУ обслужить в первую очередь. Обычно эти проблемы решаются двумя путями. 1. На аппаратном уровне выделяется отдельный блок сопряжения, называемый блоком приоритетных прерываний (БПП), на который возлагаются следующие функции (см. рис.23): · объединение всех выходов " Запрос прерывания" от ВУ в один для соединения с входом " Запрос прерывания" МП; · маскирование несущественных в текущий момент " Запросов прерывания" от ВУ; · ранжирование ВУ по приоритетам (при их одновременных запросах); · передача МП информации о том, какой подпрограмме обслуживания передать управление для обработки запроса прерывания. 2. На программном уровне в основной программе программист должен выполнить предварительную настройку БПП на текущие потребности; создать столько подпрограмм обработки прерываний, сколько имеется активных ВУ; организовать передачу им управления при получении соответствующей информации от БПП.
Совокупность всех выходов " Запрос прерывания", подсоединенных к МПС, называется вектором прерывания. В МП предусматривается несколько команд передачи управления на определенные адреса – ровно столько, какой размерности допустим вектор прерывания. Такие команды - однословные, длиной, соответствующей разрядности шин данных в МП. При обработке прерывания МП после выдачи сигнала " Разрешение прерывания" принимает с ШД код такой команды, выставленный БПП, и тем самым " узнает", на какой адрес передать управление для обработки данного прерывания. Так в персональных ЭВМ клона РС такие прерывания называются " Int" (interrupt, прерывание). Протокол обмена между БПП и МП в момент поступления запроса на прерывания от ВУ выглядит следующим образом: 1. БПП выставляет сигнал " ЗПР" на МП. 2. МП завершает выполнение текущей команды, сохраняет в стеке адрес возврата и выдает на БПП сигнал " РПР", освобождая магистраль. 3. При получении " Разрешение прерывания" БПП выставляет на магистраль код команды безусловного перехода на фиксированную область памяти, соответствующую активированному входу " ЗПР" БПП. 4. МП принимает код этой команды с магистрали и исполняет ее. Если количество ВУ больше, чем имеет входов " ЗПР" у БПП, применяется каскадное подключение нескольких БПП. В этом случае на программу возлагается либо опрос состояния БПП ( аппаратный полинг ), либо опрос состояния ВУ ( программный полинг ). Типы магистралей. Количество шин в магистрали МПС может колебаться от двух (прямой сигнальный и возвратный проводники) до нескольких десятков, на которых могут быть реализованы самые разнообразные протоколы обмена. В целях унификации выпускаемых модулей разработан ряд стандартов, регламентирующих требования к составу магистрали и протоколу обмена, временным и электрическим параметрам сигналов, конструкции разъемов и др. Выбор той или иной магистрали для разрабатываемой МПС зависит от наличия готовых модулей, работающих с ней, и возможности их приобретения, области применения этих модулей и многого другого. Рассмотрим типы магистралей, которые можно разделить на две большие группы по способу передачи битов информации одной посылки: последовательные (биты передаются друг за другом по двум или четырем шинам) и параллельные (биты передаются одновременно). В качестве примеров стандартов последовательных магистралей можно назвать: стык С2 (ГОСТ 18145-81) и ИРПС (ОСТ 11.305.916-84) - интерфейс радиальный последовательный. Стыку С2 соответствует международный стандарт ISO 2110 (RS-232), а ИРПС - " 20 мА токовая петля". Для компьютеров РС – PS/2 (подключение " мышки", клавиатуры), USB (Universal Serial Bus), Serial-ATA и др. Все многообразие последовательных магистралей определяется методом подключения и протоколом обмена. Так международный стандарт MODBUS, которого придерживаются многие производители контроллеров технологического оборудования, по-прежнему на физическом уровне предполагает использование стандартов RS-232 (RS-422, RS-485). Магистрали в этих стандартах рассчитаны на передачу данных с небольшой скоростью на большие расстояния (удаленный терминал) или для связи с устройствами последовательного действия (например, стримером, винчестером), для которых на первый план выступают не быстродействие, а помехоустойчивость и стоимость линии передачи. Скорость передачи измеряется в бодах - бит в секунду.
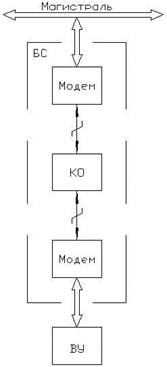
В общем виде сопряжение удаленного ВУ с системной магистралью МПС выглядит так, как показано на рисунке 26, где КО – коммутирующее оборудование, встречающееся на линии (автоматические телефонные станции, распределительные щиты, маршрутизаторы и т.д.). Элементы памяти МПС. Память МПС является ее неотъемлемой и наиболее часто запрашиваемой микропроцессором (и/или ВУ) частью. Поэтому, чтобы получить высокие показатели работы МПС, при проектировании ЗУ необходимо выбирать такие БИС памяти, для которых: - время обращения было бы меньше цикла чтение-запись МП, иначе быстродействие системы снизится из-за введения асинхронного режима по сигналам ГТ от ЗУ; - адаптер ЗУ с магистралью был бы минимален (простое управление, одинаковые электрические параметры). Промышленность выпускает большое количество типов БИС ЗУ, отличающихся емкостью, разрядностью, быстродействием, стоимостью, принципом запоминания (статические и динамические), потребляемой мощностью, конструктивным исполнением. Вид выбранной памяти сильно влияет на вопросы проектирования МПС. Поэтому приведем " грубую" классификацию ЗУ по критериям, принципиально важным для разработки. Организация блоков памяти. В процессе конкретного выбора, чаще всего определяемого возможностями разработчика приобрести ту или иную БИС ЗУ и его симпатиями, возникает задача построить блок памяти большой емкости. При этом могут возникнуть следующие трудности. 1. Элементы памяти имеют недостаточное количество прямоадресуемых ячеек. Популярное:
|
Последнее изменение этой страницы: 2017-03-11; Просмотров: 1984; Нарушение авторского права страницы
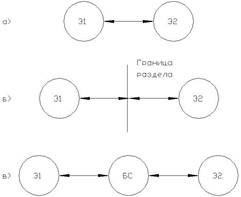 Рис.1
Рис.1