
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Упругие и неупругие соударения
Обратимся к изучению круга явлений, которые, в зависимости от области физики, именуются столкновениями, соударениями, рассеянием. Преимущественно процессы такого рода важны в физике микромира (едва ли не главная задача в физике элементарных частиц — задача о рассеянии). Столкновения составляют один из важнейших предметов рассмотрения в физической кинетике, т. е. в молекулярной физике, физике плазмы, растворов и т. д. Но и в небесной механике, коль скоро речь идет не о регулярных планетных или звездных системах, но об астероидах, кометах, фрагментах, образовавшихся как следствие взрывных процессов, данная проблема занимает достойное место. Главная особенность взаимодействий, которые могут быть квалифицированы как столкновения, состоит в следующем. Участвующие в них частицы (тела) как бы «приходят из бесконечности» и в конечном состоянии «уходят на бесконечность», где взаимодействием можно пренебречь. Сразу ясно, например, что взаимодействие Земли и Солнца не может быть отнесено к этой категории. А вот соударение биллиардных шаров — в принципе, может, хотя о бесконечностях в пределах биллиардного стола говорить и не принято. Но при достаточной и вполне разумной степени идеализации задачи (пренебрежение трением о сукно, тем более — обменом импульса через возмущение воздуха или гравитационным взаимодействием шаров) можно утверждать, что шары взаимодействуют в процессе удара, но не взаимодействуют до или после него. Значительно сложнее представить таким образом столкновение заряженных частиц, взаимодействующих по закону Кулона, поскольку сила и потенциальная энергия их взаимодействия не обращаются в нуль ни на каком конечном расстоянии. Отсюда и возникает бесконечность в корректном определении процесса столкновения, а в реальной ситуации мы всегда имеем дело с некоторым приближением к таковому. Мы в рамках курса механики ограничимся достаточно простыми примерами, по преимуществу такими, когда при соударении тела приходят в непосредственный контакт друг с другом. Термин «соударение» как раз и относят обычно к классической механике макроскопических тел. В этом случае определение траекторий тел после соударения путем решения уравнений движения оказывается часто очень сложной, а иногда вообще невыполнимой задачей. Вот тут-то особенно полезными оказываются законы сохранения энергии и импульса, прменение которых к задачам о соударениях мы сейчас рассмотрим. При соударении макроскопические тела деформируются. При этом некоторая часть кинетической энергии, которой обладали тела перед ударом, переходит в потенциальную энергию упругой деформации, а некоторая часть кинетической энергии переходит во внутреннюю энергию образующих тела атомов и молекул. В зависимости от того, насколько меняется внутренняя энергия тел, при решении задач используют нередко одно из двух приближений: абсолютно упругий и абсолютно неупругий удар. Абсолютно упругим ударом называют такое соударение тел, при котором переходом части их энергии во внутреннюю энергию тел можно пренебречь. Можно считать, что при таком ударе кинетическая энергия переходит полностью или частично в потенциальную энергию упругой деформации. Затем тела восстанавливают свою форму, отталкивая друг друга. В результате потенциальная энергия упругой деформации переходит обратно в кинетическую энергию, и тела разлетаются со скоростями, величина и направление которых определяется двумя условиями — законом сохранения полной энергии и законом сохранения полного импульса сталкивающихся тел. При абсолютно неупругом ударе тела «слипаются», т. е. после удара они движутся с одинаковой скоростью либо покоятся. Кинетическая энергия тел полностью или частично превращается в их внутреннюю энергию. Кинетическая энергия тел до и после соударения имеет различное значение, и выполняется лишь закон сохранения импульса. Пример абсолютно неупругого удара показан на рис. 6.12.
Рассмотрим также пример абсолютно упругого удара, причем ограничимся случаем центрального удара двух однородных шаров, один из которых первоначально покоится. (Удар называется центральным, если шары до удара движутся вдоль прямой, проходящей через их центры.) Пусть вращение шаров отсутствует. Пусть справедливо приближение, в котором два тела образуют как бы замкнутую систему, или, что то же, внешние силы, приложенные к шарам, уравновешивают друг друга (как, например, при скольжении
Рис. 6.12 абсолютно неупругий удар
шаров без трения по горизонтальной поверхности). Обозначим массы шаров m1 и m2 Пусть второй шар до удара неподвижен, а первый до удара двигался в положительном направлении оси х со скоростью vо (рис. 6.13).
Эти неизвестные пока величины являются проекциями на ось х
соответствующих векторов vi и V2, и, следовательно, их знак, полученный в результате решения, определит, в каком направлении оси х шары будут двигаться после удара. Запишем условия сохранения энергии и импульса:
(6.40) (6.41) Решение системы уравнений (6.40), (6.41) — задача элементарная. Искомые значения для v1 ж v2
Отметим некоторые особенности движения шаров при их упругом центральном ударе, вытекающие из полученного решения F.42). Если массы шаров равны, то из (6.42) следует, что v 1 = 0, v 2 = v 10. Это означает, что в таком случае первый шар после удара останавливается, а второй движется с той скоростью, которая была у первого шара до удара. Именно по этой причине наилучшей защитой от быстрых нейтронов оказываются вещества, содержащие как можно больше водорода. При столкновении нейтрона с ядром атома водорода — протоном — последний перехватывает практически всю кинетическую энергию (поскольку Мр = Мn), а нейтрон останавливается. Рассмотрим случай упругого столкновения тела со стенкой, т. е. с телом, массу которого можно считать бесконечно большой. Для этого случая из (6.42) получаем v1 = - v 10, v2 = 0,
т. е. в результате упругого столкновения со стенкой первый шар меняет свою скорость на противоположную, отскакивая от стенки с той же по модулю скоростью, с которой он к стенке подлетал. Если же столкновение происходит с движущейся стенкой (которая в принципе моделирует любое массивное тело), то весь этот сценарий просто переносится в систему отсчета движущейся стенки. Возвращаясь в лабораторную систему, получаем
v2 = v20 = const; v1 = - v10 + 2v20 (6.43)
в предположении, что v10, v20 считаются однонаправленными (направления «вперед-назад» учитываются посредством знака +-. Подчеркнем, что соударение, упругое в системе отсчета стенки, безусловно остается таковым и в л-системе: при корректном подсчете кинетической энергии уже нельзя пренебрегать поправками к v1, v2 порядка m1/m2 в формуле (6.43). Пусть теперь рассматривается упругое столкновение двух частиц, которое уже не может быть описано в рамках одномерной модели. Припишем индекс i начальным значениям всех физических величин, а индекс f —конечным. Закон сохранения импульса в произвольной системе отсчета будет существенно трехмерным:
(6.44) где р — сохраняющийся суммарный импульс системы сталкивающихся частиц. В ц-системе р = 0, и размерность уравнения (6.44) понижается. Действительно, векторы р 1i= - p 2i определяют некоторую прямую, векторы р 1f = - p 2f — еще одну прямую, а две пересекающиеся прямые задают некоторую плоскость (исключая тот вырожденный случай, когда р1i || p1f, так что задача оказывается одномерной). Следовательно, в ц-системе процесс рассеяния всегда происходит в некоторой плоскости, поэтому в общем случае вместо двух переменных v1, v2 в уравнениях (6.40), (6.41), мы будем иметь дело с четырьмя. Процесс рассеяния, ввиду его фактической двумерности, удобно представить графически, как это показано на рис. 6.14. В ц-системе
| р 1i |= | p 2i | = pс
тогда кинетическая энергия в ц-системе (которая при упругом столкновении сохраняется) равна
Отсюда следует, что и после соударения
| р 1f|= | p 2f| = pс .
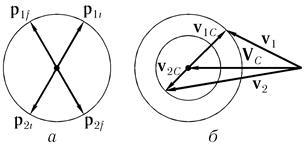
Таким образом, концы векторов р1i, ..., p 2f в ц-системе можно представить лежащими на окружности, как это показано на рис. 6.14 а: в результате рассеяния векторы p12 поворачиваются, как показано на рисунке, не изменяя своей длины (модуля). Похожая картинка получилась бы и для скоростей частиц, только концы векторов vx 2C располагались бы на концентрических окружностях с радиусами, соответственно равными pc/m1, pc/m2. На рис. 6.14 б показано, как можно построить векторы скорости частиц в л-системе, складывая v1, 2C с вектором скорости центра масс. Такое построение можно провести и для начальных, и для конечных скоростей.
рис. 6.14 а)концы векторов р1i, ..., p2f в ц-системе можно представить лежащими на окружности в результате рассеяния векторы p12 поворачиваются, не изменяя своей длины (модуля)
б)можно построить векторы скорости частиц в л-системе, складывая v1, 2C с вектором скорости центра масс
Если бы столкновение было неупругим, но мы бы знали, какая именно доля кинетической энергии в ц-системе утрачена, можно было бы провести аналогичное построение, но радиус соответствующих окружностей был бы разным для начального и конечного состояний. Эта проблема — учет неупругости с известными потерями — чрезвычайно важна в контексте молекулярной, атомной и ядерной физики, ибо моделирует реакции — от химических до ядерных. Лекция 4
Идеальные жесткие связи. При соприкосновении тел возникают силы взаимодействия, которые можно описать, пользуясь кинематическим понятием абсолютно жестких идеальных связей. Такие связи вынуждают точки механической системы двигаться по определенным поверхностям. Если, например, две материальные точки скреплены жесткой нерастяжимой связью, вынуждающей их находиться на неизменном взаимном расстоянии, то любая из них движется по сфере, в центре которой находится другая точка. Ограничения, налагаемые, связями, в общем случае вынуждают тела двигаться криволинейно. Такое движение всегда ускоренное. Ускорение можно формально приписать силам, которые называются реакциями жестких связей. Эти силы заранее не заданы как функции положения точек. Интегрируя уравнения типа(1.1) при дополнительных ограничениях, налагаемых связями определяют силы реакции. В следующем параграфе будет рассмотрен способ, позволяющий обойтись вообще без определения сил реакций при решении уравнений движения. Движение по твердой поверхности приводит не только к возникновению сил реакции, но и сил трения. Их значение в прикладной механике исключительно велико. Но при трении движение сообщается не только самому телу как целому, а и составляющим его молекулам. Взаимодействие между трущимися поверхностями очень сложное и только в результате усреднения по отдельным молекулам получает вид некоторой силы взаимодействия. В этом разделе мы будем рассматривать элементарные законы, относящиеся к отдельным материальным точкам (частицам), а не к большим совокупностям молекул. Поэтому силы трения будут вообще оставлены в стороне. Они изучаются подробно в курсах технической механики. Степени свободы механической системы. Чтобы осуществить желаемый переход от прямоугольных координат к другим, более удобным для решения некоторых механических задач, сформулируем сначала необходимые общие определения. Степенью свободы механической системы называется всякий независимый параметр из числа тех, которые задают положение системы в пространстве. Число таких независимых параметров называется числом степеней свободы системы. Положение одной материальной точки в пространстве задается с помощью трех независимых параметров (ее координат), измеренных относительно некоторой системы отсчета. Положение N материальных точек, не скрепленных жесткими связями, определяется ЗN независимыми параметрами. Но если расположение точек как-либо фиксировано, то число степеней свободы может быть и меньшим, чем 3N. Например, если две точки соединены жесткой неизменяемой связью, то на шесть декартовых координат этих точек (x1, у1, z1, х2, у2, z2) наложено условие: (x1 - х2 )2 +( у1 - у2)2 +( z1 - z2)2 =R122 где R12 - заданное расстояние между точками. Следовательно, все декартовы координаты уже не являются независимыми параметрами; независимы только пять из этих шести величин. Иначе говоря, система из двух материальных точек, находящихся на неизменном расстоянии друг от друга, имеет пять степеней свободы. Если рассмотреть три материальные точки, жестко скрепленные треугольником, то координаты третьей точки должны удовлетворять двум равенствам, аналогичным только что приведенному, где в правых частях стоят R132 и R232.Таким образом, девять координат вершин жесткого треугольника подчинены трем равенствам, и только шесть параметров оказываются независимыми. Треугольник имеет шесть степеней свободы. Положение твердого тела в пространстве полностью определяется тремя точками, не лежащими на одной прямой. Такие три точки, как только что было показано, задаются шестью параметрами. Следовательно, произвольное твердое тело имеет шесть степеней свободы. При этом рассматриваются только такие движения твердого тела, при которых оно не деформируется, например вращение волчка. Обобщенные координаты. Как было видно из примера точек, скрепленных связями, не всегда удобно задавать положение системы в декартовых координатах. При этом требуется выписывать дополнительные условия, обусловленные связями. Выбор параметров, необходимых для фиксирования положения всех точек механической системы, должен определяться прежде всего целесообразностью. Так, если силы зависят только от расстояния между частицами, то разумно ввести эти расстояния в уравнения динамики в явном виде, а не через посредство декартовых координат. Механическую систему можно описать с помощью таких параметров, число которых равно числу степеней свободы. Эти параметры могут иногда совпадать с декартовыми координатами тех или иных точек. Например, в системе из двух точек, скрепленных жесткой связью, параметры можно выбрать так: задать положение одной из точек в декартовых координатах, после чего другая точка непременно будет находиться на шаре, имеющем центром первую точку. Положение второй точки на шаре будет известно, если дана ее долгота и широта. Вместе с тремя декартовыми координатами первой точки долгота и широта второй точки полностью определяют положение данной системы в пространстве. Для трех жестко скрепленных точек надо задать только что описанным способом положение одной стороны треугольника и угол поворота третьей вершины вокруг этой стороны. Независимые параметры, определяющие положение механической системы в пространстве, называются ее обобщенными координатами. Мы будем обозначать их символами qa, где нижний индекс а принимает столько значений, сколько степеней свободы у данной системы.
Длина отрезка из двух точек, связанных жесткой связью: l2 = ( xA – xB )2 + ( yA – yB )2 + ( zA – zB )2 Количество координат, необходимых для описания положения системы в пространстве, называется степенью свободы. f ( …xi…) = 0 - условие связи.
f
t1 t 2
2. Уравнения Лагранжа Уравнение
было записано в декартовой системе координат. Но любая система координат есть результат свободного выбора. Описывая в ней некоторый закон природы, мы тем самым вносим в наше описание определенный элемент произвола. Кроме выбора координатной системы, имеется еще свобода в отношении системы отсчета. Скорости материальных частиц относительно разных систем отсчета различны. Между тем желательно так формулировать законы природы, чтобы в них по возможности не входили величины, по определению относящиеся к наблюдателю (например, координаты), иначе говоря, исключить элемент произвола в описании. Для этого надо перейти от дифференциального закона (1.1) к интегральному. Значение интеграла не зависит от переменных, в которых он вычислен (например, площадь некоторой фигуры одинакова при вычислении в любых координатах: прямоугольных, полярных и т.д.) Поэтому можно надеяться так сформулировать законы механического движения, чтобы они сводились к высказываниям об интегральных выражениях, описывающих некоторый участок движения. Это оказывается осуществимым при следующих условиях: 1. Связи идеально жесткие, т. е. сил трения нет. 2. Силы взаимодействия между материальными точками могут быть представлены в виде
Гдеиндекс i относится к частице, а производная по векторной величине гi сама представляет собой вектор с составляющими
Величина U одна и та же для всей механической системы. О ее значении будет сказано ниже. Принцип Гамильтона. Условие (2.1) не столь ограничительно, как может показаться. Под него подпадают силы тяжести, электростатические силы, упругие силы, т. е. как раз такие, к которым применяется механика Ньютона. В дальнейшем, будем выражать силы в форме (2.1). Для простоты последующих формул будем считать, что имеется только одна жесткая связь. Это ограничение не имеет существенного значения, так как переход к случаю нескольких связей производится непосредственно. Запишем условие связи в виде уравнения: F(r1,..., ri,..) = 0. (2.2) Рассмотрим теперь некоторое изменение координат материальных точек системы δ ri, которое будем считать бесконечно малым. Это изменение обязано не движению точек, а может рассматриваться как чисто умозрительная операция. Оно, однако, не должно нарушать условия (2.2), т. е. мыслится совместимым с наложенной на систему связью. Например, если точки вынуждены двигаться по поверхности, то изменения δ ri, берутся вдоль поверхности, а в остальном совершенно произвольны. Но если точки в результате смещений остались на поверхности, определяемой уравнением (2.2), то смещения удовлетворяют очевидному условию:
Здесь было использовано то обстоятельство, что величины δ ri, бесконечно малые, так что функция F разлагалась в ряд Тейлора до первых производных включительно. Рассмотрим систему дифференциальных уравнений (1.1) при дополнительном условии (2.2). Это условие означает, что не все переменные ri независимы. Чтобы сделать число независимых переменных системы равным числу уравнений, умножим каждое уравнение на соответствующую величину δ г* и сложим их. Силу Fi разобьем на два слагаемых:
Первое слагаемое обусловлено взаимодействием между материальными точками, второе описывает силы, возникающие вследствие действия связей. Теперь надо воспользоваться тем условием, что связи идеальные. Начнем с простейшего случая гладкой неизменяемой поверхности, по которой движется материальная точка. Тогда сила реакции должна быть перпендикулярна поверхности, т. е. скалярное произведение векторов F'i и δ ri равно, нулю. Ведь это произведение означает не что иное, как работу перемещения точки по поверхности, т. е. работу сил трения, которые мы заранее исключили, считая связь идеальной. И в случае двух или вообще нескольких точек каждое слагае F'i δ ri в отдельности может и не обращаться в нуль, потому что точки могут совершать работу друг над другом. Например, если две точки скреплены жесткой нерастяжимой связью и одна из них как-либо ускорена, она потянет за собой другую, т. е. совершит над ней работу. Следовательно, в системе из нескольких материальпых точек, скрепленных жесткими связями, на силы реакций связей накладывается условие: ∑ i F'i δ r i =0, (2. 4) причем перемещения подчинены равенству (2.3). Но тогда из уравнений (1.1) и (2.4) следует, что должно выполняться такое равенство:
Для всех перемещений точек, совместимых со связями, т. е. удовлетворяющих равенству(2.3). Из этого уравнения можно исключить какое-либо изперемещений δ r i и подставить его в (2.5), после чего все остальные перемещения, очевидно, становятся независимыми. Более удобно использовать метод неопределенных множителей, так как он позволяетсохранить симметрию формул относительно всех δ r i. Умножим равенство (2.3) на некоторый множитель α и прибавим его к (2.5):
Поскольку α произвольно, мы ввели в уравнение лишний параметр и благодаря этому можем считать все перемещения совершении независящими одно oт другого. Следовательно, возможно положить равными нулю все δ r к (k ≠ i), кроме одного δ r i. Тогда остается
Вектор δ r i теперь считается совершенно произвольным, благодаряпараметру α на δ r i больше не накладывается никаких связующихусловий. Но тогда возможно положить равными нулю любые, две составляющие вектора ri, например уi, и ziа не равную нулю составляющую δ xi сократить. Для этой составляющей получим:
Тем же способом получим аналогичное уравнение для любой составляющей. В векторной форме уравнение выглядит так:
причем значок i нумерует все материальные точки механической системы. Вместе с уравнением (2.2) уравнения (2.8) позволяют определить все ri (как функции времени) и параметр α. Заметим, что произведения Перейдем теперь к формулировке интегрального принципа. С этой целью преобразуем по частям первое слагаемое равенства(2.5):
(ограничимся пока одним членом). Заметим, что δ r i означает разность двух радиус-векторов, взятых в один и тот же момент времени. Производная от разности равна разности производных, так что
Пользуясь тем, что знак δ относится к бесконечно малой разности, перепишем получившееся равенство так:
Будем суммировать получившееся выражение по материальным точкам, т. е. по i. Сумма
благодаря малости δ r i, которая здесь может рассматриваться как дифференциал координаты. Собирая отдельные члены равенства (2.5), преобразованные описанным способом, и вынося символ δ за знак суммы, получим:
Допустим теперь, что система перемещается, следуя законам механики, из некоторого заданного начального положения, которое она занимала в момент времени t = t0, в другое, тоже заданное положение в момент t1. Для этих положений, так как они заданы, надо положить все δ r i равными нулю: (δ r i )t=t0 =(δ r i)t=t1 =0. Проинтегрируем выражение, стоящее в левой части (2.9), от момента времени t0 до момента t1. Полная производная по времени сведется при этом к разности значений дифференцируемой величины на пределах:
Но на пределах δ r i, как было указано, обращаются в нуль. Кроме того, символ δ, означающий разность значений функции для одного и того же момента времени, может быть переставлен с интегралом по времени по той же причине, по которой δ переставляется с производной по времени. Обозначая теперь сам интеграл буквой S, приходим к следующему равенству:
Интеграл в выражении для S берется вдоль истинной траектории движения, так как при выводе равенства (2.12) были использованы уравнения (1.1). Символ δ впереди интеграла означает, что наряду с этим интегралом рассматривался другой, взятый по бесконечно близкой траектории, отстоящей от истинной на δ r i для i -той частицы. Такая близкая траектория называется варьированной, а символ δ - вариацией данной величины. Вариация имеет совсем иной смысл, чем дифференциал. Последний относится к изменению величины вдоль траектории движения системы, тогда как вариация отвечает переходу с траектории на другую, близкую к ней и допустимую наложенными на систему условиями связи. Дифференциал определяется из уравнений движения, а вариация подчинена только связям и в остальном произвольна. Равенство (2.12) показывает, что интеграл S, взятый вдоль истинной траектории системы, имеет экстремум, так как он не изменяется при переходе к любой близкой траектории. Подобно этому, функция вблизи экстремума не меняет значения при изменении аргумента. Вместо уравнения (1.1) можно исходить из равенства (2.12) как основного положения механики. Такой подход может показаться искусственным. На самом деле, как мы вскоре увидим, в этом лежит путь к очень широким обобщениям. Кроме того, уравнения движения, которые выводятся из условия (2.12) как исходного принципа механики, могут оказаться гораздо удобнее в приложениях, чем исходная система уравнений (1.1). Величина S называется действием механической системы, а утверждение об экстремальности S вдоль истинной траектории — принципом Гамильтона. В некоторых случаях этот принцип допускает более простую формулировку и тогда называется принципом наименьшего действия.
dS = 0 –принцип наименьшего действия
S - действие
Подынтегральное выражение носит название функции Лагранжа
Потенциальная система – это система, которая зависит лишь от положения ее в пространстве, не принимая в расчет пути. Исходя из функции Лагранжа, получим соотношения, выражающие законы механики
Производная от функции Лагранжа по скорости есть импульс
Производная функции Лагранжа по координате есть сила
Учитывая, что дифференцирование по времени выражения для производной от функции Лагранжа по скорости, дает сумму сил
Второй закон Ньютона
можно переписать для функции Лагранжа
где i =1, 2, …n - номер координат Комбинация в виде
равна полной энергии. Это видно если подставить зависимость для лагранжиана
После приведения к каноническому виду получается закон сохранения энергии
Обобщенные координаты. Более удобным в практике считается выбор системы координат исходя из физики задачи
xi = ( qa ) в качестве координат могут выступать углы, связи и т.д. Получим соотношения для представления функции Лагранжа через обобщенные координаты
Из принципа наименьшего действия
Получаем уравнение Лагранжа в обобщенных координатах
2. Избранные вопросы классической механики |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 1152; Нарушение авторского права страницы

 Рис. 6.13
Рис. 6.13

 (6.42)
(6.42)

 - жесткая связь, система жесткой связи
- жесткая связь, система жесткой связи

 - функционал.
- функционал. t
t (1.1)
(1.1) , (2.1)
, (2.1) ,
,  ,
,  .
. (2.3)
(2.3)
 (2.5)
(2.5) (2.6)
(2.6)
 ,
,  (2.8)
(2.8) суть не что иное, как силы реакций связей, согласно (2.3).
суть не что иное, как силы реакций связей, согласно (2.3).
 .
.

 (2.9)
(2.9)
 -
- 

 =0
=0 - функция Лагранжа
- функция Лагранжа




 уравнение Лагранжа.
уравнение Лагранжа.

 - полная энергия.
- полная энергия.



 =0
=0