|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Особенности движения замкнутой системы из двух взаимодействующих материальных точек. Приведенная масса
Руководствуясь правилом «от простого — к сложному», мы до сих пор изучали наиболее простые движения, при которых размеры тела не играют роли, т. е. использовали приближение (модель) материальной точки. При этом мы рассматривали лишь случай, когда сила, действующая на материальную точку, известна (движение в поле тяжести, гармонические колебания, закон сохранения энергии при движении в постоянном силовом поле). Теперь мы сделаем следующий шаг — рассмотрим особенности движения нескольких взаимодействующих материальных точек. В этом случае действующую на каждую из них силу со стороны остальных тел нельзя уже считать заданной величиной, так как она зависит от меняющегося положения этих остальных тел, траектории движения которых заранее не известны. Так, например, в одном узле сложного механизма часто оказываются соединенными несколько деталей, оказывающих воздействие друг на друга и совершающих друг относительно друга сложные движения. Один из простейших примеров такого взаимодействия изображен на рис. 6.1: две материальные точки с массами m1 и m2 соединены пружиной и совершают по горизонтальной плоскости колебания друг относительно друга. Ситуация здесь отличается от той, которая рассаматривалась в гл. 4, где мы изучали гармонические колебания одного тела, соединенного пружиной со стенкой.
рис 6.1
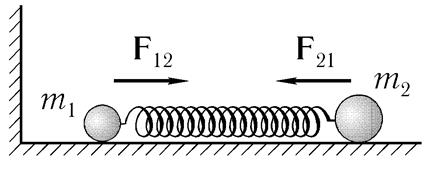
Изучение движения нескольких взаимодействующих тел мы начнем с простейшего случая —движения всего двух материальных точек, при движении которых можно пренебречь всеми действующими на них силами, кроме сил, с которыми они действуют друг на друга. Другими словами, эти две материальные точки образуют замкнутую систему тел. Массы этих тел обозначим m1и m2 (рис. 6.2). Силу, действующую на тело 1 со стороны тела 2, обозначим F12. Она, в соответствии с третьим законом Ньютона, равна по величине и противоположна по направлению силе F21, действующей на тело 2 со сто- стороны тела 1. Положение наших тел в некоторой произвольно выбранной инерциальной системе отсчета определяется в момент времени t соответствующими радиусами-векторами этих тел r 1(t) и r 2(t).
рис 6.2
Перейдем к изучению особенностей движения этих двух тел с помощью второго закона Ньютона. Записав этот закон для каждой из материальных точек, получим следующую систему уравнений относительно интересующих нас радиусов-векторов r1 и г2:
(6.1)
Прежде всего мы рассмотрим задачу об относительном движении двух тел. На языке математики относительное движение определяется зависимостью от времени радиуса-вектора r (t) = r 2 - r 1, соединяющего две рассматриваемые материальные точки. Уравнение для r (t) легко получить из нашей системы двух уравнений (6.1) следующим способом. Поделим обе части первого из уравнений на m1, а обе части второго уравнения поделим на m2. После этого вычтем из левой и правой частей второго уравнения левую и правую части первого, соответственно. В результате получаем
где мы учли, что
F 12 = - F 21.
Последнее уравнение можно окончательно записать в виде
где буквой μ мы обозначили величину, которая называется приведенной массой и которая равна
μ = m1m2/(m1 + m2). (6.3)
Уравнение (6.2) отражает замечательное свойство задачи о движении двух взаимодействующих материальных точек: задача об относительном движении двух материальных точек в замкнутой системе сводится к задаче о движении одной материальной точки с приведенной массой под влиянием той же самой силы взаимодействия. Одним из примеров замкнутой системы двух тел являетя система «Солнце-Земля», если пренебречь влиянием других тел солнечной системы, что в действительности можно сделать с хорошей точностью. Для вычисления траектории движения Земли относительно Солнца нет необходимости решать систему из двух уравнений (6.1), т. е. находить сначала r1(t) и г2(t) (траектории Солнца и Земли в некоторой инерциальной системе координат) и только после этого уже определять r(t) = r2(t) - r1(t) (траекторию относительного движения). Вместо этого можно сразу найти траекторию относительного движения, решая всего одно уравнение (6.2), что и сделал в свое время Ньютон, блестяще подтвердив расчетами знаменитые опытные законы Кеплера. Правда в этом случае в уравнение относительного движения войдет приведенная масса, которая для системы «Солнце-Земля» равна
μ = MCMз/(MC+M3) = Mз/(1 + Mз/MC).
Масса Солнца примерно в двести тысяч раз больше массы Земли. Поэтому во многих практически важных задачах отношением масс в знаменателе последней формулы можно с хорошей точностью пренебречь, и считать, что приведенная масса для системы «Солнце-Земля» совпадает с массой Земли. Что касается задачи об относительном движении двух тел, соединенных невесомой пружиной (рис. 6.1), то в этом случае на тела помимо упругой силы, играющей здесь роль силы F12, действуют еще сила тяжести и реакция опоры. Эти силы, однако, уравновешивают друг друга и не оказывают влияния на движение тел. Поэтому в отсутствие сил трения движение тел по горизонтальной поверхности подчиняется законам движения замкнутой системы, и, следовательно, задача об их относительном движении сводится к рассмотренной в гл. 4 задаче о движении одного тела, но с приведенной массой. Например, для случая колебаний двух тел с одинаковой массой m их приведенная масса μ, в соответствии с (6.3), равна m/2. Тогда для вычисления, скажем, частоты относительных колебаний таких двух тел можно воспользоваться уже известной нам формулой (4.18) для частоты колебаний одного тела, соединенного пружиной со стенкой, а именно,
т. е. частота колебаний в рассматриваемом случае в √ 2 раз больше, чем в случае колебаний одного тела. |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 456; Нарушение авторского права страницы