
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Силовом поле. Закон сохранения энергии
Наряду с кинетической энергией важную роль в механике играет понятие потенциальной энергии, которое также тесно связано с понятием работы. Но если кинетическая энергия материальной точки определяется, наряду с массой, модулем ее скорости, то потенциальная энергия, как мы увидим, зависит от положения тела в пространстве. Как и при обсуждении свойств кинетической энергии, мы будем пока рассматривать движение одной материальной точки под действием заданной силы. Если задана векторная функция точки пространства F ( r ), то ее называют силовым полем. Функция F ( r ), во-первых, не должна зависеть от скорости тела (ни от величины, ни от направления), во-вторых, она должна быть постоянна во времени, и в-третьих, работа в данном силовом поле по любому замкнутому пути должна обращаться в нуль (см. рис. 5.4), что математически записывается следующим образом:
Такие силы (силовые поля) называют консервативными; для них и только для них может быть введено понятие потенциальной энергии. Примем условно какое-либо произвольное положение материальной точки за начальное (радиус-вектор этого положения в выбранной системе координат обозначим го). Тогда
Рис. 5.4
потенциальной энергией U( r ) материальной точки, положение которой по отношению к выбранной системе координат определяется радиусом-вектором r, называется работа, совершаемая действующей на эту материальную точку результирующей силой, при перемещении материальной точки из положения r в начальное положение:
U( r ) = А( r -» r 0). (5.13)
Корректность такого определения следует из условия консервативности (5.12). В самом деле (см. рис. 5.4), если
то
при следовании в одном и том же направлении вдоль контура С. Заменим направление следования (т. е. движения) в любом из этих направлений на противоположное. Как следствие, получаем, что работа при перемещении между точками 0 и 1 не зависит от выбора пути, по которому оно происходит:
F(r) dr = inv.
Но это как раз и означает, что потенциальная энергия (5.13) определена однозначным образом как функция координат. Проиллюстрируем наше определение важным примером. Опыт показывает, что силы взаимодействия двух изолированных материальных точек зачастую направлены вдоль соединяющей их прямой и по модулю зависят только от расстояния между ними. Такие силы называются центральными. Примером может служить сила гравитационного взаимодействия Солнца с планетой, если их рассматривать как точечные массы, или сила электростатического взаимодействия двух точечных зарядов. Рассмотрим движение материальной точки под действием центральной силы, направленной, например, от одного и того же центра О и по модулю зависящей только от расстояния до него (рис. 5.5). Покажем, что работа при перемещении материальной точки из положения 1 в положение 2 по двум произвольным путям а и б одинакова, то есть от формы пути не зависит. Для доказательства проведем из центра О концентрические сферические поверхности, радиусы которых отличаются на бесконечно малую величину dR. Эти поверхности рассекут обе наши траектории а и б на бесконечно малые отрезки пути. Бесконечно малые отрезки криволинейной траектории можно заменить на бесконечно малые прямолинейные векторы перемещений: на рисунке эти векторы перемещений между сферой с радиусом R и сферой с радиусом R+dR по траекториям а и б обозначены через d r a и d r b соответственно.
Докажем сначала, что работа δ Аа вдоль перемещения d r a равна работе δ Аb d r b вдоль перемещения drв. В соответствии с определением (5.2) получаем для δ Аа:
δ Aa = F(R) dracosα = F(R) dR. (5.14)
Аналогично получаем для dAв:
δ Ab= F(R) drbcosβ = F(R) dR. (5.15)
В написанных выше формулах угол α обозначает, как показано на рисунке, угол между силой F(r) и перемещением dra, а угол β — угол между F(r) и drb. Кроме того, мы использовали равенства
dra cos α = drbcos β = dR.
Повторяя вышеприведенные рассуждения для всех отрезков пути а и пути б между соседними сферическими поверхностями, мы получим, что элементарные работы δ A на всех этих отрезках равны, а, следовательно, равны и суммарные работы на путях а, б. Так как пути а, б были выбраны произвольно, то это означает, что работа, совершаемая при перемещении материальной точки центральной силой, не зависит от формы пути, а зависит только от начального и конечного положения этой материальной точки. Представим себе теперь, что на заданную материальную точку действуют силы со стороны N других материальных точек, причем все эти силы F1, F2, ... FN являются центральными. Результирующая сила, действующая на заданную материальную точку уже не является центральной — в разных точках пространства она не будет направлена к какому либо одному и тому же центру (для наглядности на рис. 5.6 изображен случай, когда на материальную точку массы m действуют две центральные силы гравитационного притяжения со стороны двух материальных точек с массами m1 и m2). Для дальнейших рассуждений воспользуемся тем фактом, что результирующая сила Fр равна векторной сумме составляющих ее сил F1, F2, ... FN.
Рис. 5.6. Это заранее не очевидное свойство сил, получило название принципа суперпозиции сил. Следовательно справедливо соотношение: N Fp = ∑ Fi, (5.16) i=1 тогда элементарная работа при перемещении материальной точки на величину dr при действии результирующей силы Fр может быть записана согласно определению (5.2) в виде N N δ Ар = Fр dr = ∑ Fi dr = ∑ δ Ai (5.17) i=1 i=1
где δ Ai — элементарная работа, совершаемая центральной силой Fi. Отсюда для полной работы Ар результирующей силы при перемещении из некоторой точки 1 в точку 2 получаем:
Ар=
Каждая из работ A1, A2, ... АN совершается центральной силой и поэтому не зависит от пути. Следовательно и работа Ар не зависит от пути. Вернемся к определению потенциальной энергии (5.13):
U( r ) = А( r —> > r 0).
Так как работа не зависит от пути, то после выбора какого-либо нулевого положения r о потенциальная энергия однозначно зависит только от положения материальной точки в пространстве. Что касается выбора нулевого положения, то этот выбор определяется соображениями удобства решения конкретной механической задачи. Произвол в выборе нулевого положения приводит к тому, что потенциальная энергия определена с точностью до произвольной константы. В самом деле, вычтем из потенциальной энергии при одном выборе начального положения
U ( r ) = А ( r —> г 0) потенциальную энергию при другом выборе начального положения
U'( r ) = А ( r —> > r' 0):
U( r ) - U'( r ) = А( r -> r 0) - А( r -> r '0). (5.19)
Так как работа не зависит от пути, то справедливо соотношение А( r- > r 0) = A( r -> r '0)+А( r '0 -> r 0).
Подставляя это равенство в (5.19), получаем
U ( r ) = U'( r ) + A( r '0 —> r 0),
то есть изменение нулевого положения действительно приводит к измене- изменению потенциальной энергии на величину А( r '0 —> r 0), не зависящую от r — положения материальной точки в пространстве. Сумма кинетической и потенциальной энергий называется полной энергией материальной точки и обозначается обычно буквой Е:
E( r ) =T( r ) + U( r ). (5.20)
Покажем, что при движении материальной точки в поле консервативных сил или, что то же, в потенциальном поле ее полная энергия не меняется. Для этого воспользуемся соотношением, связывающим бесконечно малое изменение кинетической энергии с работой:
dT = F d r = δ A. (5.21)
Это равенство справедливо для движения под действием любой силы, а не только потенциальной. Но лишь в этом последнем случае его правую часть можно выразить через изменение потенциальной энергии:
dU = U(r + dr) - U(r) = A(r + dr -> r0) - A(r -> r0). (5.22)
Так как работа в случае потенциальной силы не зависит от пути, то
А( r -> > r 0) = А( r -> > r + d r ) + А( r + d r -> > r 0).
С учетом этого равенства соотношение (5.22) можно записать в виде
dU = -А( r -> r + d r ) = -δ А.
Подставляя полученный результат в (5.21), приходим к равенству
dT = -dU, d(T + U)=0, dE = 0.
Дифференциал (бесконечно малое приращение) любой функуции равен нулю, если эта функция является константой, то есть мы получили
Е( r ) = Т( r ) + U( r ) = const. (5.23)
Это соотношение выражает закон сохранения энергии. Укажем еще одно весьма полезное формальное следствие равенства (5.22). Предположим вначале ради упрощения выкладок, что либо потенциальная энергия зависит только от одной координаты, либо движение происходит лишь вдоль одной координаты. В обоих этих случаях можем положить U = U(x). Соответственно, в элементе работы δ А существенна лишь компонента силы Fx (с учетом ее знака). Положив δ А = Fx dx, получаем
Fx = -dU/dx. (5.24)
В качестве примера приведем выражение для потенциальной энергии деформированной пружины. При малых деформациях связь между силой и смещением, как известно, линейна:
F = - кх, что соответствует квадратичной зависимости для потенциальной энергии:
U = -кх2/2.
В принципе ту же операцию мы можем провести и в общем трехмерном случае. Рассматривая малые перемещения вдоль осей Оx, Оу, Oz, мы получим три дополняющих друг друга соотношения:
Входящие в них производные по одной координате при фиксированных остальных называются в математике частными производными и обозначаются ∂ /∂ х и т. д. Таким образом, вектор силы F в компонентах может быть представлен следующим образом:
Fx = -(dU/dх), Fy = -(dU/dу), Fz = -(dU/dz). (5.25)
Эти соотношения имеют более общий характер, нежели сама ньютонова механика. В практическом отношении они удобны для вычисления силы, если известна потенциальная энергия как функция координат. Соотношения (5.25) можно представить в компактной форме, введя формально вектор
который в математике называется градиентом. Мы еще неоднократно встретимся с такими операторами в разделе «Электричество и магнетизм». Такой формализм позволяет переписать (5.25) в предельно коротком виде:
F = - |
Последнее изменение этой страницы: 2017-03-14; Просмотров: 460; Нарушение авторского права страницы
 F(r) dr = 0. (5.12)
F(r) dr = 0. (5.12)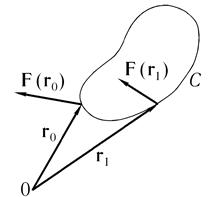
 F(r) dr=0,
F(r) dr=0,  F(r) dr = -
F(r) dr = -  F(r) dr
F(r) dr

 dAp =
dAp =  dAi =
dAi = 
 Ai = А1 + А2 +... + AN. (5.18)
Ai = А1 + А2 +... + AN. (5.18)

 U.
U.